多Agent联合灭火救援协同组织研究
2014-12-31刘静,程桦
刘 静, 程 桦
(1.中国人民武装警察部队学院 消防指挥系,河北 廊坊 065000;2.安徽大学 资源与环境工程学院,安徽 合肥 230601)
多Agent系统中,Agent之间的协作是最关键、最具特色的一个环节。在多Agent系统中,单个Agent往往非独立完成某项任务,它必须通过和其他Agent相互协作,完成既定作战任务[1]。多个Agent的交互会表现为相互合作,但在此过程中也会出现冲突行为,如何消除由于交互而产生的冲突,是一个重要的研究课题[2]。对于联合灭火救援协作的假设如下:① 对于给定的任务Task,需要解决问题的能力和资源超出单个Agent所能提供的能力和资源;② 单个Agent完成某个单项任务所具备的信息、知识是不全面的。
部队作战是为了达成一定的作战目的,所有兵力(包括参战兵力装备、通信保障和后勤辅助兵力)在指挥员统一指挥下而进行的一系列军事活动,包括作战方案制定和作战计划实施2个主要过程[3]。本文的军队组织结构特指多Agent系统的协作和协调方法,目的是利用该方法建立描述作战Agent联合灭火救援的模型。
1 作战Agent的协作及联合行动
作战型Agent组织中的Agent特点如下:①Agent是利他的,这是军事指挥的一个重要特征,首先完成上级Agent命令它承担的角色,然后再追求自身的目标;②Agent的个性不同,具有不同知识和技能,如水罐编成和泡沫编成具有不同作战优势;③ 具有作战组织结构设计所需要的基本知识和技能。
1.1 联合灭火救援任务
各Agent在相互协作的过程中,实时感知救援环境;根据协同作战需要,与其他作战Agent进行适时信息交互;根据所拥有的关于参战力量的协作信息,在具体作战规则(如消防部队战斗条令、相关作战指挥知识等)指导下,制定协作决策方法,使自身在整个作战行动中能够完成与其他Agent的协作;根据制定的协作决策,调用系统的相应功能模块并执行,同时接受外界协作环境对其产生的影响,完成预期作战目标;在协作过程中,对协作决策进行动态调整,使其状态和动作能够适应复杂的联合灭火救援协同作战要求。
1.2 联合灭火救援角色功能
联合灭火救援将任务分解为7类,即成员交互类A、环境感知类B、协作群体结构类C、信息缓存类D、协作综合态势类E、动态协作类F及协作决策类G,相应的角色功能和责任见表1所列。
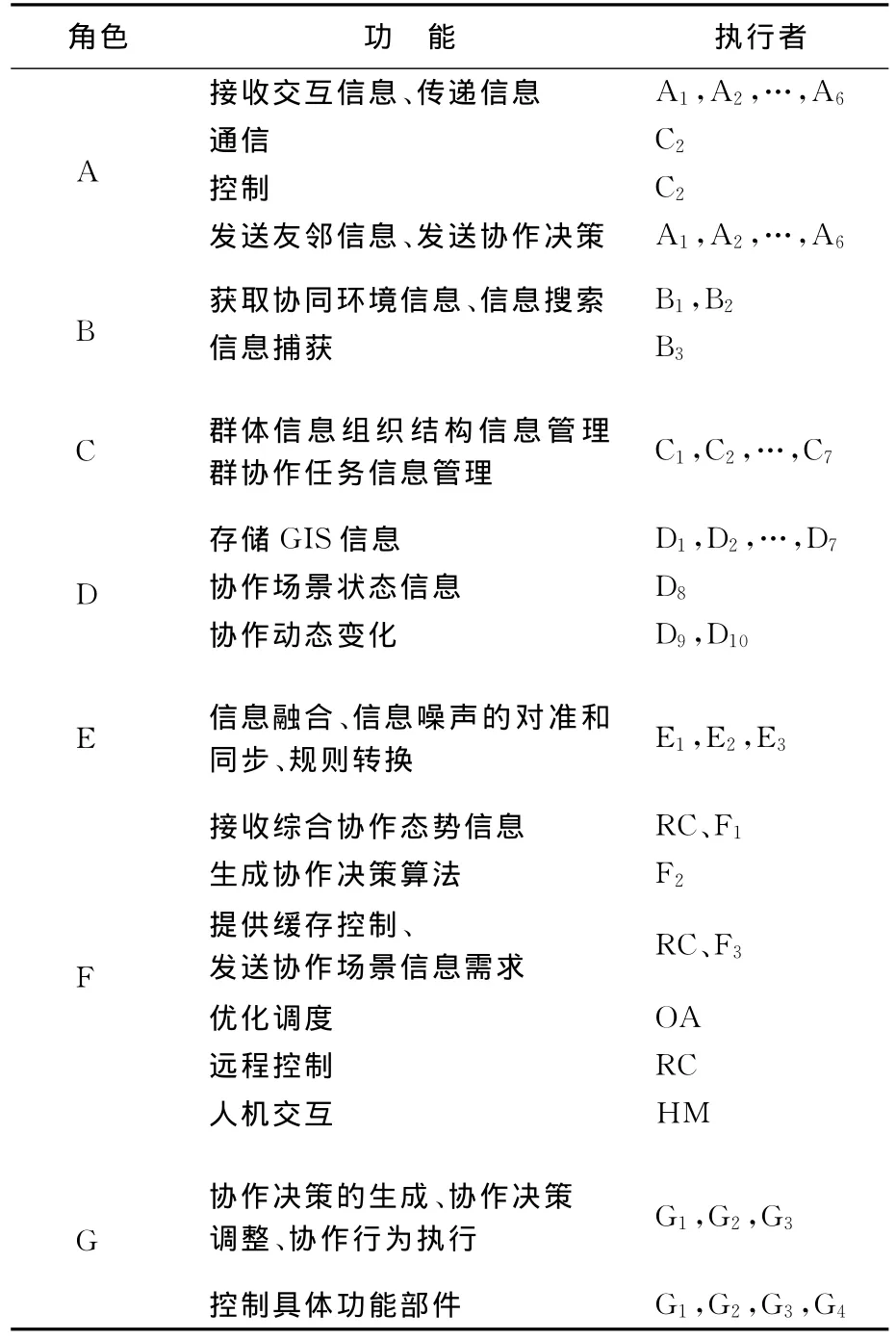
表1 联合灭火救援任务分解表
(1)A类角色包含6个角色,职责是进行参数测量,这6个角色具有独立性,不存在相互之间的通信和依赖。
(2)B类角色包含3个角色,相互独立,不存在任何相互关系。
(3)C类角色包含7个角色,Cl、C3、C4、C5、C6、C7之间具有独立性,但均依赖于C2。
(4)D类角色包含10个角色,相互独立,不存在任何相互关系。
(5)E类角色包含3个角色,相互独立,不存在任何相互关系。
(6)F类角色包含6个角色,相互独立,不存在任何相互关系。
(7)G类包括4个角色,相互独立,各角色对应实际协同模式中的实体。
1.3 联合灭火救援协作结构
联合灭火救援多Agent系统的协作结构,是系统中各个实体Agent相互配合、协同工作所表现出来的组织形态[4]。有什么样的协作结构就有相对应的协作机制,它决定系统自适应、协调及自治等特征形式和实现方法[5]。
Agent协作结构种类很多,最常用的是对等网络、联盟和黑板结构3种模型[6]。对等网络结构是指多Agent系统中的各成员具有相同的角色和地位,不设协调者,相互之间通过对等的通信和交互实现信息共享[7]。成员内部只有局部信息,通信和状态都是固定的[8]。黑板结构是指系统中存在多个知识源,Agent通过黑板内容的增减和修改来公布信息共享和Agent协作情况[9-11]。本文采用联盟结构确定联合灭火救援的组织协同,如图1所示。
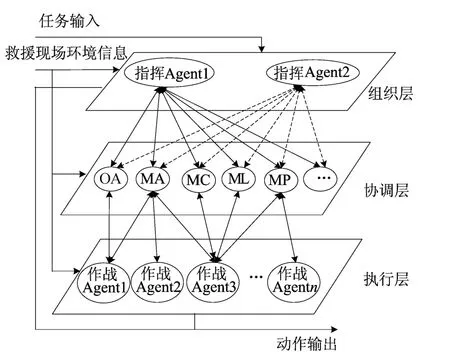
图1 多Agent联合灭火救援的协作结构模型
处于组织层的指挥Agent等对其下属的控制具有强制性,作战Agent和指挥Agent都是彼此独立的,他们按照系统要求,接受并执行各自的任务。可见多Agent联合灭火救援3层协作结构本质上是一种动态自组织结构,这也是多Agent系统特点的集中体现。该结构明确了联合灭火救援中作战Agent和指挥Agent相互间的控制关系,使复杂系统在结构上更为简化,而各层在控制上更具灵活性和可靠性。该结构能使联合灭火救援作战实现全局最优,在联合灭火救援作战指挥领域具有一定的通用性。
2 动态任务分配协作算法
2.1 合同网协议
文献[12-13]提出合同网协议,主要用于研究分布式问题求解,其基本思想是利用招标-投标-中标这一机制,将系统任务进行分配,通过招标方和投标方的双向选择,相互协商,避免资源和知识等发生冲突,提高系统完成任务的质量,降低系统代价[14-15]。
2.2 作战Agent分配原则
(1)火场主要方面原则。首先将兵力分配给火场主要方面,并且优先分配给作战能力最强的Agent。
(2)到达救援现场时间最少原则。按照消防部队执勤战斗条令要求和消防部队5个“第一”要求,组织实施灭火与应急救援行动。
(3)救援人员安全第一原则。尽量避免灭火救援人员和装备受到高温、辐射、爆炸、倒塌及中毒伤害。
(4)多种因素兼顾原则。在前3条原则无法同时满足的情况下,应兼顾各原则,这是多目标优化问题。
(5)战勤人员决策优先原则。无论何时,保证战勤人员的决策比计算机优先级高,战勤人员可以随时干预与更改计算机给出的火力分配方案。
2.3 术语和约定
(1)A为m个作战Agent集合,A= {a1,a2,…,am}。
(2)T为需要完成的子任务集合,T= {t1,t2,…,tn},T0=T∪ Ø。其中,Ø 为虚拟任务集,表示任务队列中的开始节点或终止节点。由于虚拟任务集Ø没有执行过程,因此开始执行时间为0,占用时间也为0。
(3)Ai为符合任务ti要求备选的作战Agent集合,ti∈T,Ai⊆A。
(4)Cji表示任务Agentaj(aj∈A,1≤j≤m)完成任务ti所付出的代价。
(6)Nsj(t)表示Agentaj在t时刻所具有的作战能力。
(7)Hjα为子任务组合效益权重;Wij为对应任务的权重。
(8)Qik、Lj为潜在任务分配组和正式组。
(9)sj为共同占用作战组,S为共同占用作战组集。
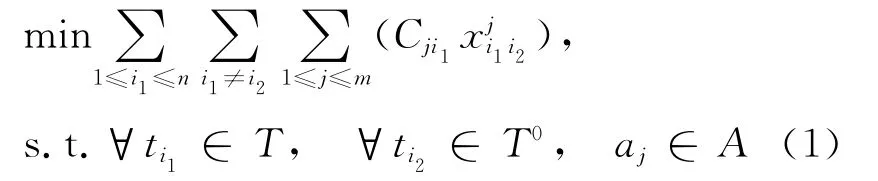
要保证联合灭火救援任务分配使整个部队付出的代价最小,目标函数为:
在能够完成上级Agent分配任务的前提下,要争取最大收益,付出最小代价,即
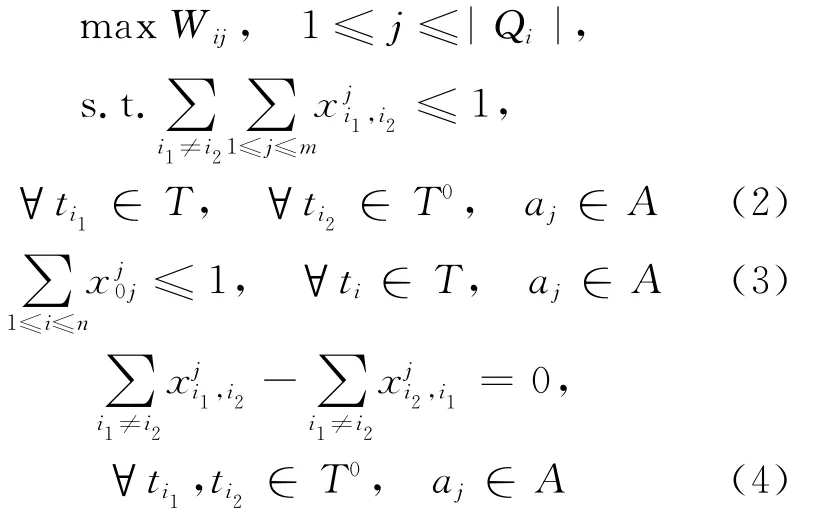
(2)式使某一作战任务只能执行一次,即作战任务具有不可再现性,一旦任务分配给某个作战Agent或者一组作战Agent并执行,这个任务即宣告结束,无需进行再次分配。当任务执行结束后,后续任务只能有一个,该后续任务可以是虚拟任务;(3)式确保作战Agent的任务队列中的起始节点唯一;(4)式确保作战Agent的任务 队列中任务执行时间不会重叠,前任任务和后续任务与当前任务ti共同占用作战Agentsj。
要确保任务执行能力和资源需求,当作战Agentsj在t时刻开始执行任务时,其作战能力和资源要大于、等于该任务所要求的力量总数,否则任务将无法完成,即
2.4 任务优化分配算法
上级Agent分配任务的原则是在能够完成任务的前提下,以最小的作战代价和消耗获取最大的作战效果。
(1)作战Agentaj(aj∈A,1≤j≤m)向上一级指挥Agentc公布所能完成的任务集Tj,Tj⊆T。

(3)aj给出Tj中完成所有子任务所付出的代价,即Cjk(1≤k≤l,l=|Tj|,tk∈Tj),将结果返回给上一级Agentc,这里Cjk就是sj完成任务tk需要的作战能力。此处的作战能力是任务tk在Tj中某一位置,aj完成任务所付出的代价。虽然作战任务相同,例如同是火情侦察,但由于在不同的作战阶段,或者在同一作战阶段,但侦察范围不同,完成此项侦察任务需要的力量和付出的代价也不同。因此,作战任务tk在不同任务序列或同一任务序列不同位置时,在时间环境等约束条件下,aj完成任务付出的代价可能是不一样的。

(5)将潜在任务组集合表示为Qj={qj1,qj2,…,qjα},其中,1≤α≤2|Tj|-1,则作战付出的代价值表为SCj={scj1,scj2,…,scjα,},对qjα中的任务是按Tj中任务执行时间顺序递增排列的。
(6)将各作战Agent给出的代价值Cjk(aj∈A,1≤j≤m)发送给指挥Agentc,指挥Agentc得到每一子任务的最小代价值为ek(1≤k≤n),构成最小代价值表为E={e1,e2,…ek,…,en},并返回给T的回应者。其中,ek=min{apjα|tk∈qjα;1≤α≤2|Tj|-1;1≤j≤m},k=1,2,…,n。
(8)经过计算得出潜在任务组完成任务的权重集合,比较找出权重最大的潜在任务组qjk,即qjk满足如下条件:(Hjk/scjk)≥(Hjα/scjα),1≤α≤|Qj|,并将qjk及对应的权 重Wjk/scjk反馈给Agentc。此时,出现权重最大的任务组可能有2个或者2个以上,表明具备完成此任务的作战Agent可能有多个,则进一步选择实际开始执行时间st最早的任务组,即选择能尽快到达指定救援现场或者救援阵地的作战Agent。
例如,假设得到权重最大任务组有和由于任务组中任务是按原Tj中任务执行时间顺序递增排列的,即Tj={t1,t2,t3,…,tl},l=|Tj|。因此,确定由哪个任务组最终完成作战任务,取决于任务组中开始执行的时间,对2个任务组中的第1个任务进行比较,此时都为t1,实际开始执行时间一样,继而对第2个任务进行比较,对应为t2和t3。在Tj中,st2>st3,故选择以此类推,直到找出权重最大并开始执行时间最早的任务组,即为所选任务组,这个任务组既有较强的作战能力,同时又会以较快的速度到达救援现场,体现了消防部队准确迅速的作战原则。
(9)指挥Agentc计算得到权重最大的潜在任务组qj′k,即qj′k满足条件:(Hj′k/scj′k)≥(Hjα/scjα),sj∈S,1≤j≤m,将向所有作战 Agent发出通告,qj′k为作战 Agentaj′的长期任务组。
(10)aj′同样也会收到该通告,之后将qj′k添加到其长期任务组列表Lj′,对于其他的作战Agent,在收到qj′k为作战 Agentaj′的长期任务组通告后,将把任务组qjα从Qj中删除,即对∀j,α,qjα∩qj′k≠Ø时,删除权重Hjα/scjα,返回步骤(8),进行循环计算,这时潜在任务组为删除qjα之后剩余的任务队列,同理找出最大权值,直到Qj=Ø。
3 算法在火场进攻中的应用
某次作战行动中,设任务T对某一火点进行强攻,分解为4个独立的子任务t1、t2、t3、t4,采用强行破拆、正面进攻、侧翼进攻及后方供水,有3个作战Agent完成此任务。
(1)作战Agent完成作战任务的能力为:
完成作战任务矩阵为:
(3)aj给出作战子任务集Tj中所有完成作战子任务时付出代价值Cjk(1≤k≤l,l=|Tj|,tk∈Tj),并反馈给上级指挥Agent。其中

(4)对子任务的可能性完全组合,可得潜在作战子任务集为:
(5)a1、a2、a3对应潜在作战子任务的代价值为:SC1={2,3.2,4},SC2={1.8,3.5,4},SC3={1.8,2,3}。
(6)给出最小代价指标E为:

(7)对所有Qj中潜在任务组,计算各权重Hjα/scjα,即H11/sc11= 1,H12/sc12= 0.75,H13/sc13=1.10,H21/sc21=1,H22/sc22=0.60,H23/sc23=1.23,H31/sc31= 1,H32/sc32= 1,H33/sc33=1.26。
(8)作战Agent向指挥Agent反馈其最大权重为:
(9)找出最大权s3:W33/sc33,并向其他作战Agent宣布q33为长期任务组。
(10)s3将q33={0.6t3,t4}从Q3中取出,加入到L1。a3将满足q32∩q33≠Ø 的q31、q32,q33删除,H31/sc31、H32/sc32和H33/sc33也被删除,删除后的|Q3|=Ø;同理,其他作战Agent也采用此过程,将满足qj2∩q33≠Ø(j≠1)中的qjα和其权重删除,返回步骤(8),对删除后的潜在子任务集进行新一轮计算,从中比较筛选出最大权值。此时,由 于最 大权重H23/sc23=1.23,删除后,|Q1|=|Q2|,所以,对潜在作战子任务重新进行计算,L2为{0.6t2,0.4t3},L3为{t1,0.4t2},经过3次循环,∀Qj=Ø,结束。
由所有作战子任务分配可知,由Agent1独立完成作战任务t1,Agent2独立完成作战任务t4,作战任务t2由Agent1和Agent2协作完成,作战任务t3由Agent2和Agent3协作完成,整个作战任务分配完成。
4 结束语
本文在分析联合灭火救援组织机制基础上,结合军事指挥特点,研究了作战型Agent的特点。根据多Agent联合灭火救援组织特点,采用物理分解和功能分解相结合的方法,对系统任务进行分解。利用联盟协作结构,基于角色协作模型,与指挥层次相对应。给出了动态任务分配协作算法、指挥Agent与作战Agent动态任务处理流程和指挥Agent与作战Agent的协作算法,并结合战例分析算法在火场进攻中的应用,以证明该算法对解决实际作战问题的能力。
[1] 李建华,康青春,商靠定,等.灭火战术[M].北京:群众出版社,2004:15-27.
[2] 公安部政治部.灭火应用战术[M].北京:警官教育出版社,1998:215-218.
[3] 公安部消防局.中国消防手册:第9卷.[M].上海:上海科学技术出版社,2006:371.
[4] 莫于川.中华人民共和国突发事件应对法释义[M].北京:中国法制出版社,2007:26-31.
[5] 季慎强.法国灭火救援的组织指挥[J].浙江消防,2000(2):36-38.
[6] 张 羽.论联合战斗[M].北京:国防大学出版社,2003:18-23.
[7] 司光亚.战略决策综合集成研讨与模拟环境研究与实现[D].长沙:国防科技大学,2000.
[8] 薛宏涛.基于协进化机制的多智能体系统体系结构及多智能体协作方法研究[D].长沙:国防科技大学,2002.
[9] 胡晓峰.战争模拟引论[M].北京:国防大学出版社,2004:7-11.
[10] 史越东.指挥决策学[M].北京:解放军出版社,2005:40-46.
[11] 纵 恒,王文伟,陈阳娟.大型石油化工储罐区消防安全系统设计[J].合肥工业大学学报:自然科学版,2012,35(9):1259-1263.
[12] 杨瑞平,郭齐胜,赵宏绪,等.C3I系统建模与仿真[M].北京:国防工业出版社,2006:17-22.
[13] 李常洪.多Agent合作机制与合作结构研究[D].天津:天津大学,2002.
[14] 庞国峰,郝爱民,梁晓辉.一种计算机生成兵力系统自治实体行 为描述 原语 [J].系 统仿真 学 报,2000,12(4):300-304.
[15] 张 毅,胡勤友,施朝健.HLA与MAS在分布式仿真应用领域的应用比较[J].计算机技术与发展,2006,16(l):150-153.
