星载天线双轴定位机构多状态可靠性分析
2014-12-31陈树海宗益燕
张 华,陈树海,宗益燕
(上海卫星工程研究所,上海 200240)
0 引言
随着航天科技的发展,高可靠和长寿命成为航天产品追求的目标。有效载荷不断增加,结构复杂,通信卫星的精确控制愈发重要。星载天线指向的精确性关系卫星发射、运行的成功,而星载天线指向机构作为天线指向的控制机构,对天线指向精度有决定性影响。研究发现该系统及组成单元失效表现出多状态特征,其关键部件双轴定位机构包含多个状态,每个状态的可靠性要求、系统配置、失效判据、元件失效率等随状态转换而变。传统基于二状态假设的可靠性评估可能与事实明显不符而导致严重后果。处理星载天线指向机构中的多个状态,确定影响天线指向精度的原因,进行准确的可靠性建模分析,是卫星可靠性评估的关键[1-2]。
目前,对星载天线双轴定位机构的研究集中于误差分析和机构建模仿真[3-7]。对星载天线双轴定位机构的可靠性研究主要是分析天线展开机构的可靠性。对周边桁架式大型星载天线的展开运动机理和可能性进行研究,给出了大型星载天线展开系统的失效树,并建立展开机构的力学分析和非概率运动可靠性的分析模型,将运动功能函数视为随机变量函数,用二阶矩法导出可靠性计算公式。文献[8]利用模糊故障树理论,对星载天线展开系统进行模糊可靠性分析,并用机械结构的能度可靠性分析法,对展开机构的部分关键底事件进行模糊可靠性分析。对双轴定位机构可靠性分析的研究报道较少,本文对星载天线双轴定位机构的系统可靠性分析进行了研究[9-11]。
1 工作原理
早期卫星无指向机构,星载天线始终指向地面某一固定区域。之后卫星功能增加,星载天线性能也有提升,天线具有二维或更多自由度的转动和定位功能,增加了机动灵活性。天线转动设计中,双轴定位机构因结构简单、耦合少、控制方便及故障不易等特点而成为常用的星载天线指向机构。双轴定位机构驱动的天线可实现对目标的跟踪、定位等功能,满足星间和星地数据传输与通信功能需求。某通信卫星双轴定位机构如图1所示。由图可知:该机构由两个构造相同并相互垂直的组件组成,形成双自由度的转动机构[12]。整个机构通过连接支架与星载天线相连。根据功能的不同,双轴定位机构系统分为传动和控制子系统。本文对传动系统的多态可靠性进行了研究。

图1 双轴定位机构Fig.1 Dual-axis positioning mechanism
传动系统主要实现运动的传动,内部结构如图2所示。每个轴组件的传动系统主要由电机、减速器和相应的轴系组成。控制电压传至电机后,带动电机运动,再经输入轴传至减速器,减速器将电机较高的转速降低后由输出轴传出,驱动天线运动,使其绕相应的轴旋转至预定角度。经俯仰轴和方位轴两个方向调整,可实现整个卫星天线系统的精确定位。
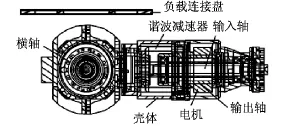
图2 双轴定位机构内部结构Fig.2 Internal configuration of dual-axis positioning mechanism
传动系统中,步进电机因良好的开环控制性能、不产生累积误差、线路简单和控制简便等特点,被广泛用于工业系统。谐波减速器结构紧凑、质量小、传动平稳和传动比大,有广泛的应用前景。步进电机和谐波减速器的组合,质量轻、控制精度高,且易于数字化控制,普遍用于低速空间驱动机构。
根据双轴定位机构传动系统的基本工作原理和结构,其可靠性如图3所示。每个轴组件由步进电机、传动轴和谐波减速器三个单元串联而成。方位轴组件和俯仰轴组件为并联关系,即当两套组件均失效时系统失效,其余状况下系统不失效。

图3 双轴定位机构传动系统的可靠性Fig.3 Reliability of dual-axis positioning mechanism transmission system
2 俯仰轴组件可靠性分析
2.1 双轴定位机构多态系统定义
机构的两套组件基本相同,仅对俯仰轴组件进行可靠性分析,方位轴组件与之类似。俯仰轴组件由步进电机、传动轴和谐波减速器三个单元构成,步进电机有完全失效、部分失效和正常三种状态;传动轴有完全失效和正常两种状态;谐波减速器有完全失效、部分失效和正常三种状态。为便于表示和计算,各单元的性能状态用相对值表示,即以该状态时单元的角速度与正常时角速度的比值作为该状态的性能值,正常时性能值为1,部分失效时为0.7,完全失效时为0。令g1,g2,g3为三个单元性能状态的集合,则


对应单元在某时刻处于某种性能状态的概率可用集合表示为

式中:Pij为单元j处在状态i时的概率,且

此处:Pr为可靠性。
因单元j处于kj个状态中的一个,即单元的状态互不相容,且构成一个完整的事件集合,即

式中:T为单元j的工作间隔。gji与Pij(t)的组合决定了单元j在任意时刻的状态概率分布。
某时刻单元性能状态用随机变量为G1(t),G2(t),G3(t),俯仰轴组件整体性能状态为G(t),多状态可靠性如图4所示。

图4 俯仰轴组件的多状态结构函数Fig.4 Multistate structural function of pitch axis component
2.2 双轴定位机构马尔可夫模型
根据双轴定位机构多状态系统定义,任一单元j具有kj个不同状态,对应不同性能水平,用集合表示为gj={gj1,…,gjk},当前性能水平以随机变量Gj(t)表示。在间隔0,[]T内,单元j的性能水平为一随机过程。星载天线双轴定位机构一般为不可修,故仅考虑不可修单元的可靠性。

图5 俯仰轴组件各单元的状态空间转移Fig.5 State space transfer ofepitch axis component
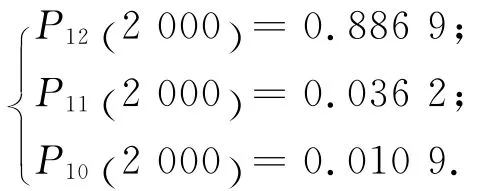
用马尔可夫法建立每个单元的Kolmogorov方程,则对步进电机有
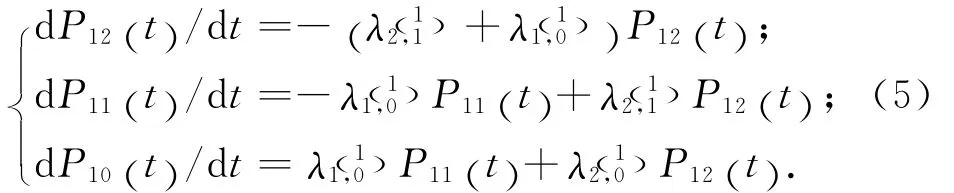
初始条件为P12(0)=1,P11(0)=P10(0)=0。

对传动轴有

初始条件为P21(0)=1,P20(0)=0。
对谐波减速器有
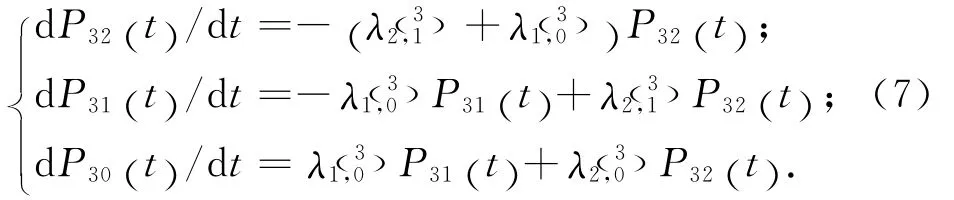
初始条件为P32(0)=1,P31(0)=P30(0)=0。
2.3 双轴定位机构可靠度评估
求解动态系统时马尔可夫模型的优势明显,但单纯采用马尔可夫法求解,遇到复杂系统时会出现状态爆炸。由计算机可得复杂系统的状态转移矩阵及相应方程,但系统足够大时,计算仍是问题,且精度也不理想。因此,将用马尔可夫模型求解时降低系统中需求解等式的维数作为解决问题的突破口。通用生成函数(UGF)用递归方法和合并技术,有效降低计算量,并可应用基于通用生成函数的可靠性框图方法,降低系统中通过马尔可夫获得的方程的维数。该法主要求解多状态系统中各单元的马尔可夫方程,然后将结果用通用生成函数方法联合后求解整个系统的动态行为,可降低整个系统需求解的方程数[14-16]。
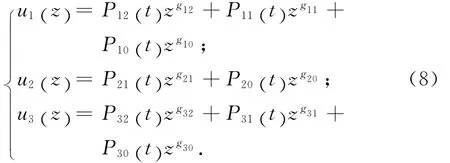
根据UGF法推导出双轴定位机构各单元u函数[13-15]。即
基于马尔可夫和UGF的双轴定位机构可靠性如图6所示。

图6 基于马尔可夫和UGF的双轴定位机构Fig.6 Dual-axis positioning mechanism based on fusion of Markov model and UGF
双轴定位机构为串联机构,故应用串联系统的u函数公式得到俯仰轴组件的整体U函数

式中:

则
根据俯仰轴组件的u函数,可得不失效概率


3 结束语
本文对某星载天线双轴定位机构多状态可靠性进行了分析。将马尔可夫模型结合UGF法用于多态可靠度评估,对实际机械系统的可靠度评估具有指导意义。但本文未考虑系统中各单元的相关性,也未涉及各单元状态间的故障率函数不服从指数分布等。这将是后续研究重点。
[1] 屠善澄.卫星姿态动力学与控制[M].北京:中国宇航出版社,2005.
[2] 孙 京,马兴瑞,于登云.星载天线双轴定位机构指向精度分析[J].宇航学报,2007,28(3):545-550.
[3] 田 浩,赵 阳,孙 京,等.双轴定位点波束天线波束指向计算[J].宇航学报,2007,28(5):1215-1218.
[4] 李长江,廖 瑛,廖超伟,等.卫星天线双轴定位系统虚拟样机动力学仿真[J].中国空间科学技术,2005,25(5):52-56.
[5] 鄢小清,杜云飞,廖 瑛,等.卫星天线双轴定位机构建模与仿真[J].航空计算技术,2004,34(3):86-89.
[6] 赵 阳,白争锋,王兴贵.含间隙卫星天线双轴定位机构动力学仿真分析[J].宇航学报,2010,31(6):1533-1539.
[7] 游斌弟,赵志刚,魏 承,等.基于空间算子代数的星载天线机构动力学计算[J].兵工学报,2011,32(1):85-90.
[8] 梁 波.模糊可靠性分析在星载天线展开系统中的应用[D].西安:西安电子科技大学,2009.
[9] 陈建军,张建国,段宝岩,等.基于非概率模型的星载天线展开机构可靠性分析[J].西安电子科技大学学报(自然科学版),2006,33(5):739-744.
[10] 陈建军,张建国,段宝岩,等.大型星载天线的展开系统失效树分析[J].机械设计与研究,2005,21(3):6-8,18.
[11] 陈建军,张建国,段宝岩,等.周边桁架式大型星载天线的展开可能性分析[J].宇航学报,2005,26(S1):130-134.
[12] 廖 瑛,李长江,冯向军,等.基于Pro/E的双轴定位机构虚拟样机的建模与校核[J].上海航天,2005,22(5):59-65.
[13] 彭鸿霖.可靠性技术手册-失效分析技术[EB/OL].[2012-04-30].http://www.kekaoxing.com
[14] HUANG Hong-zhong,AN Zong-wen.A discrete stress-strength interference model with stress dependent strength[J].IEEE Transactions on Reliability,2009,58(1):118-122.
[15] AN Zong-wen,HUANG Hong-zhong,LIU Yu.A discrete stress-strength interference model based on universal generating function[J].Reliability Engineering and System Safety,2008,93(10):1485-1490.
[16] LEVITIN G.The universal generating function in reliability analysis and optimization[M]. London:Springer,2005.