汽车斜角碰撞安全气囊点火控制策略研究
2014-12-31殷文强郭厚锐刘玉云白中浩
殷文强,郭厚锐,刘玉云,白中浩
(湖南大学 汽车车身先进设计制造国家重点实验室,湖南,长沙 410082)
在保护驾驶员和乘员安全方面,安全气囊系统已成为了一种基本配置[1]。与其它的安全系统不同,安全气囊系统作为汽车碰撞发生后保护人身安全的最后一道防线,它关系到驾驶员和乘员的生命安全。因此,确保安全气囊精确可靠的点火是非常必要的。当前,关于安全气囊控制器点火算法的研究主要集中在两个方面,一是提高算法的抗路面干扰能力,二是在需要点火的时刻,研究如何提高控制点火时刻的精度[2]。为了提高路面抗干扰性能,研究了双向加速度合成的气囊控制算法,引入了汽车行驶过程中的z向加速度[3-4]。为提高气囊点火的精确度,研究了基于预碰撞信息的安全气囊控制器点火算法和采用神经网络的方法[5-10],通过多参数引入,在汽车碰撞之前对汽车的运行状态进行判断,采用预判断的方法提高了安全气囊点火的可靠性。相对第一种研究,该方法只是研究了如何提高抗路面干扰,并没有对对如何提高气囊控制器点火时刻精度进行进一步的研究。第二个方面,在积累了第一方面研究成果的同时,采用预判断方法提高抗干扰能力和点火可靠性,但是该方法采用的基础算法依然是传统的点火算法。传统的点火算法对碰撞严重性灵敏度不高,汽车在不同速度不同角度的碰撞下,传统点火算法可靠性不高[11]。有研究表明,在所有的汽车与汽车碰撞事故中,汽车发生100%正面碰撞的概率为16%,其它各种斜角碰撞的概率占23%[12]。关于斜角碰撞安全性,美国FMVSS208法规规定了48 km/h的30°斜角碰撞安全性要求,而在我国,并没有针对汽车斜角碰撞中乘员保护的相关试验标准。在交通事故中,安全气囊在发生角度碰撞时不起爆的情况常有发生,由此造成的用户与制造商的纠纷也不在少数。乘员不能得到很好的保护,导致的人员和经济损失巨大。因此,在我国进行斜角碰撞研究,提高斜角碰撞中安全气囊点火算法的判断可靠性和准确度,对于提高碰撞中乘员的保护有着重要的意义。
汽车在不同速度和角度的碰撞下,根据力与加速度的关系,其y向加速度与斜角碰撞强度具有一定的关联性,本文从这一特性出发,构建一个考虑斜角碰撞差异的可靠性更高的安全气囊控制器点火算法。
1 传统算法点火准确性分析
对于单一的碰撞模式,汽车的碰撞严重程度和乘员的损伤程度与汽车的碰撞加速度密切相关。根据这一特性,构建的传统点火算法主要有:速度增量法、比功率法、加速度增量法、移动窗积分法、神经网络算法、加速度平方累积算法、基于速度变化的判别算法、加速度增量绝对值累积算法等[3,11]。
为了评估传统算法的点火可靠性,获取了某车型不同碰撞形式下5种点火算法得到的TTF,并与相应碰撞形式下的RTTF对比。一般情况下,RTTF是基于127 mm-30 ms准则。因此有必要先获得假人向前移动127 mm所需要的时间。通常有两种方法可以确定假人移动127 mm的时间,第一种是根据高速摄像资料来判断假人移动的时间;第二种方法就是对碰撞加速度进行两次积分来获取假人移动127 mm的时间[11]。本文采用第2种方法获取所需要的时间。
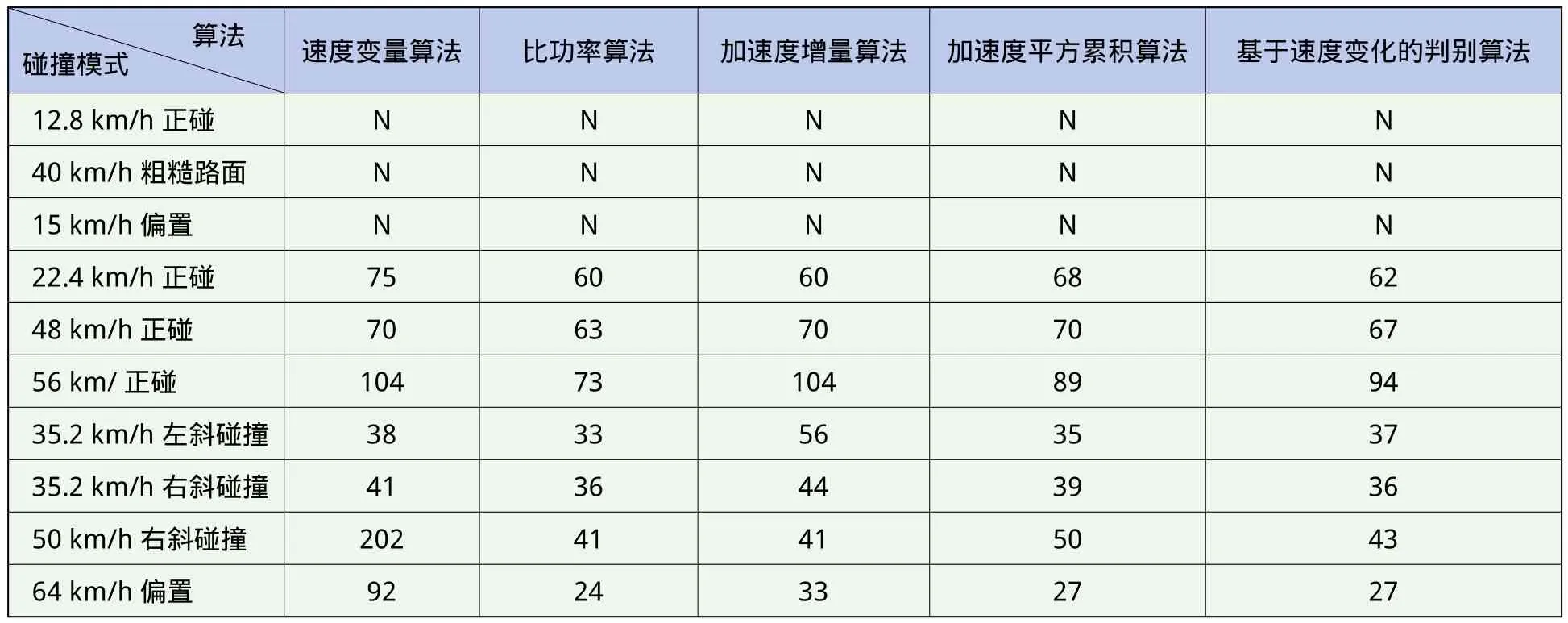
表1 某乘用车不同碰撞模式和算法下的TTF/ RTTF值[1]%
传统算法的TTF和RTTF对比结果见表1。表中“N”表示在该模式下,安全气囊没有被触发。比率大于100表示该碰撞模式下,气囊的点火时刻滞后于RTTF。从表1中可知,5种点火算法在不需要点火的状态下安全气囊都没有点火。各算法在不同正碰模式下都能较好地控制TTF,比率基本上能达到70%以上,但是,各种算法在用于斜碰撞中时,都不能较好地控制TTF。在斜碰撞中的比率都在30%~40%间,因此,现有的点火算法不能满足实际需要,有必要对现有的算法进行改进或构建一种新的算法来提高汽车在发生斜碰撞时的点火准确性与可靠性,提高气囊在斜碰撞中对乘员的保护。
2 汽车斜角碰撞的动力学分析
汽车安全气囊的控制器通常是通过刚架结构与汽车固结在一起,以保证控制器能够真实地感知汽车碰撞过程中的加速度。当汽车发生碰撞时,相互接触部分发生剧烈变形,同时,剧烈的冲击通过车架传递给传感器,形成x向和y向陡峭的加速度前沿。在发生斜角碰撞时,车辆的前部只有一侧参与碰撞中能量的吸收,这种碰撞形态下碰撞变形大,刚度小,所以碰撞中车体冲击的加速度峰值小。因而在同样的速度下发生碰撞时,发生正面碰撞的点火时刻要早于斜角碰撞的时刻,但是RTTF变化量与加速度增量并不是呈线性关系。因此在两种碰撞形式中采用只考虑x向加速度的点火算法无法对斜角碰撞做出准确的判断。
在汽车事故中,汽车发生斜角碰撞,相互碰撞的汽车受到的碰撞力与碰撞方向相反,根据力与加速度的关系,受斜角碰撞的汽车将产生沿x和y两个方向的力,如图1所示。碰撞过程中车体的总能量和瞬时受力由式(1)和式(2)表示。
式中,E为碰撞总能量;m为汽车质量;u为碰撞速度;F为碰撞力;hr为撞压系数;t为接触时间;Δu为速度变化量。
根据式(1)和式(2),车身相应的受力方向上产生的加速度反映碰撞强度。图2是一次典型的斜角碰撞(30°)试验中采集的双向加速度曲线。由图2可知,在碰撞的前30 ms(点火算法判断的有效区间),y向加速度与x向的加速度具有很强的相关性。根据国内外的研究,车辆在65 km/h以下的速度发生碰撞时,汽车的变形量与碰撞的速度基本成线性关系,碰撞速度越高,变形量越大,相应的加速度也就越大。由于碰撞前驾驶采取了制动等措施,大部分车辆在碰撞前一刻已降至较低的速度。因此,根据碰撞加速度的特征,可以考虑利用汽车碰撞时y向的加速度作为辅助判断因子,使汽车发生斜角碰撞时对安全气囊点火算法进行控制,提高算法可靠性和精度。
当汽车发生斜碰撞时,在不同速度下,发生不同角度的碰撞工况下,x向和y向的加速度信号的关联性,从图1的受力图分析可知。同一速度下不同角度碰撞,偏角越大,y向加速度所占的比例越大,也就是说y向碰撞强度越大。而在相同角度不同速度下碰撞时,汽车所受的横向和纵向加速度因速度的增大而增大,但比值不变。汽车在不同速度和不同角度碰撞工况中加速度的差异,为新算法的构建提供了可能。
3 基于y向加速度干预合成算法
通过表1中对各传统算法点火准确性的分析可知,基于加速度平方累积算法在各碰撞形式下的TTF与RTTF比值比较均衡,因此选择对加速度平方累积算法作改进,式(3)为传统加速度平方累积算法。
式中,So为传统算法积分量;n为当前时间点;k为算法考虑的采样点数,即积分窗宽;fs为采样频率;r为z向权重因子。
利用斜碰撞中x向和y向加速度信号的相关性,及y向加速度对斜角碰撞的敏感性,突破了传统算法只考虑x向加速度的限制,构建了基于y向加速度的安全气囊控制器点火算法。算法表达式如下。
式中,Sc为基于y向加速度干预的合成算法积分量;n、k、fs、r的定义同式(3);r为权重因子,表征y向加速度在合成算法积分量Sc中的权重。
为避免碰撞信号因为y向加速度的引入导致合成的Sc过度的变形,需要对r进行控制,一般取0≤r≤1。碰撞过程中,y向碰撞越剧烈,正向加速度越大。由于碰撞前y向的本身没有速度,碰撞使其获得横向的速度,碰撞后又回归到速度0,因此,y向加速度有正有负。根据能量守恒,正向加速度与负向加速度是相等的,即y向加速度取平方求和反映的是横向碰撞强度。
为了比较新算法的可靠性,y向因子引入对判断曲线的影响程度,采用两种算法对同一斜碰撞进行对比,比较新旧算法积分值的变化趋势,新算法能否根据斜角碰撞强度对积分值进行相应调节,从而实现点火时刻的调节。考虑到实车斜角碰撞试验成本高及台车试验不便于模拟斜角碰撞等因素,本文采用通过试验验证的整车有限元模型进行仿真,获取斜角碰撞的加速度。图3为左侧30°速度为48 km/h斜角碰撞分别采用y向加速度干预的合成算法(r=0.5)求得的Sc值和不考虑y向加速度干预的传统算法求得的So值的比较曲线。从图3可以得出,考虑y向加速度干预的算法求得的Sc曲线的变化趋势与传统算法求得的Sc曲线的变化趋势一致,而使用Sc代替So作为点火参数可以根据斜碰撞的碰撞强度的感知,对点火时刻进行相应的调节,提高判断准确性,从而提高系统的在斜角碰撞中对乘员的保护能力。
4 算法的有效性验证
4.1 参数选取
在斜角碰撞中,TTF因采用y向加速度干预而得到调节,但是TTF需要调节多少,可以通过设置合理的权重因子r来实现。窗宽k的选取和点火时刻、信号采样频率等有关,可变范围比较小。z向权重因子r与相应车型的抗干扰能力有关,对斜角碰撞TTF的影响较小。因此,首先选择合适的k值和r值,然后再渐近修改r的值。在本文中k=3 000,r=0.7[3]。r选取的方法是在30 km/h的速度下发生正面碰撞时的RTTF决定的积分值S,在相同速度的斜角碰撞时,r的取值使合成积分值Sc等于S的时刻为RTTF,即调节r值,使得在30 km/h的斜角碰撞下TTF等于RTTF。图4为应用该方法选择r值的优化曲线。在30 km/h的正面碰撞中,RTTF为23 ms,斜角碰撞RTTF为33.5 ms。根据此方法求得当r=0.5时,30 km/h的斜角碰撞下TTF=RTTF。
4.2 有效性验证
为了评价基于y向加速度干预的合成积分量Sc相对于传统积分量So的优化性能,使用有限元仿真的方法得到表1中各工况的碰撞加速度曲线,使用相同方法获取RTTF,对各碰撞形态使用基于y向干预的合成算法,得到的TTF与RTTF的比值见表2。
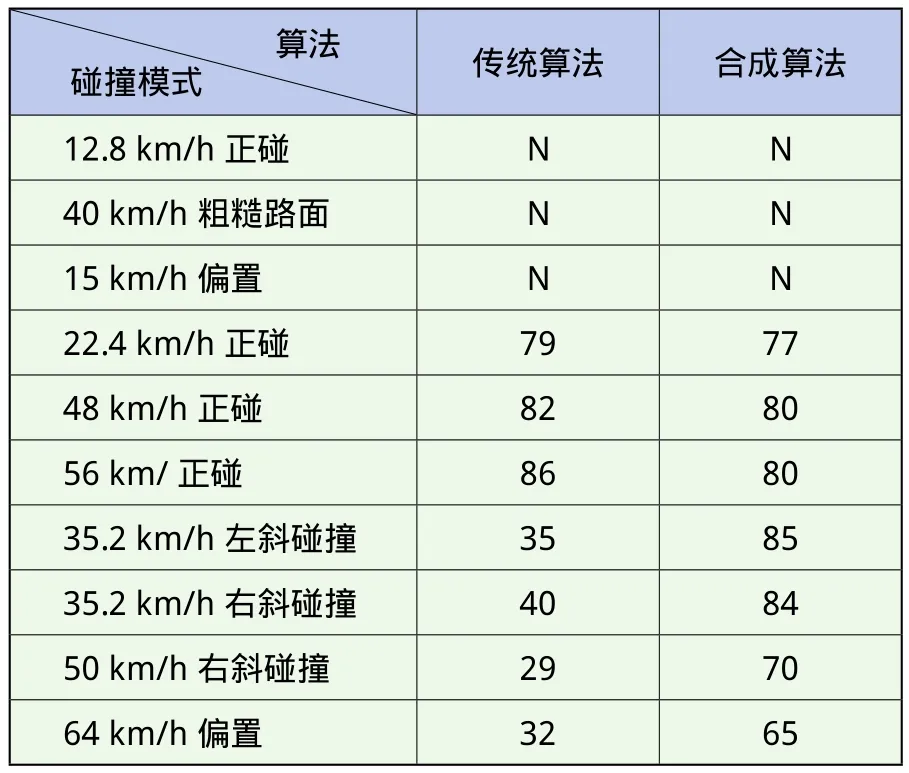
表2 合成算法的TTF/ RTTF值%
由表2可知,基于y向加速度干预的合成算法与传统算法相比,在正面碰撞工况下,点火准确性没有太多变化,但是在斜角碰撞工况下,其点火准确性有了很大的提高。在斜角碰撞中,TTF与RTTF的比值均能达到70%以上,表明基于y向加速度干预的合成算法能够有效提高斜角碰撞的准确性,基本达到算法设计的目标。
本文中,尽管有关斜角碰撞曲线是通过有限元仿真的方法获取的,但是并不影响基于y向加速度干预的方法有效性的验证,而只影响参数的选取。在实际碰撞过程中,由于车辆本身结构、传感器安装位置等因素都会对气囊控制器的加速度信号产生影响,所以在具体设计时,需要根据实车试验综合分析来决定r的值,提高安全气囊在斜角碰撞中的点火准确性。当然,安全气囊控制作为一个系统,包括碰撞识别、抗干扰等方面,本文所做的改进侧重于斜角碰撞中的控制,在基本的控制算法中寻找突破,提高了安全气囊在斜角碰撞中的保护性能。
5 结论
(1)传统的安全气囊控制器点火算法在斜角碰撞工况下点火时刻不理想。
(2)分析发现汽车在发生斜角碰撞的过程中x、y两向加速度存在很强的相关性,且y向加速度与斜角碰撞强度具有相关性。
(3)利用斜角碰撞过程中x向和y向加速度的相关性,构建了一种基于y向加速度的安全气囊控制器合成算法。
(4)利用合成算法,在斜角碰撞工况中TTF与RTTF的比值提高到了70%以上。这一事实说明,合成算法与传统算法相比在处理斜角碰撞工况中具有更高的准确性。
References)
[1]张金换, 杜汇良, 马春生,等. 汽车碰撞安全性设计[M].北京市:清华大学出版社,2010:370.
Zhang Jinhuan,Du Huiliang,Ma Chunsheng,et al.Automotive Design for Crash Safety[M]. Beijing:Tsinghua University Press,2010:370.(in Chinese)
[2]唐国强,朱西产. 汽车安全气囊点火算法的研究[J]. 公路与汽运,2009(2):1-5.
Tang Guoqiang,Zhu Xichan. Reseach on the Airbag Deployment Algorithm [J]. Highways & Automotive Applications,2009(2):1-5. (in Chinese)
[3]葛如海,朱文婷,臧绫. 基于改进移动窗算法的碰撞识别控制策略的研究[J]. 汽车工程,2011,33(7):590-593,622. (in Chinese)
Ge Ruhai,Zhu Wenting,Zang Ling. A Study on the Control Strategy for Vehicle Impact Identification Based on Improved Moving Window Algorithm[J]. Automotive Engineering,2011,33(7):590-593,622.(in Chinese)
[4]郑维,黄世霖,张金换. 双向加速度合成气袋控制算法及其抗路面干扰特性[J]. 清华大学学报(自然科学版),2003,43(2):250-253. (in Chinese)
Zheng Wei,Huang Shilin,Zhang Jinhuan. Bidirectional Acceleration Airbag Control Algorithm and Its Anti Road Agitation Characteristics[J]. Tsinghua University(Sci &Tech),2003,43(2):250-253. (in Chinese)
[5]PIETZSCH S,VU T D,BURLET J,et al. Results of a Precrash Application Based on Laser Scanner and Short-Range Radars[J]. IEEE Transactions on Intelligent Transportation Systems,2009,10(4):584-593.
[6]Yang Ying,Zao Guangyao,Sheng Jing. Occupant Pose and Location Detect for Intelligent Airbag System Based on Computer Vision[C].ICNC'08 Proceedings of the 2008 Fourth International Conference on Natural Computation,October 18-20,2008,Jinan,China,2008(6):179-182.
[7]JOHNSON A,WILLSON R,CHENG Y,et al. Design Through Operation of an Image-Based Velocity Estimation System for Mars Landing[J]. International Journal of Computer Vision,2007,74(3):319-341.
[8]CHO K,CHOI S B,SHIN K,et al. A Pre-Crash Discrimination System for an Airbag Deployment Algorithm[C].2010 American Control Conference,ACC 2010,June 30-July 2,2010,Baltimore,MD,United States:IEEE Computer Society,2010:6949-6954.
[9]秦孟苏. 基于模糊神经网络的汽车安全气囊智能点火控制算法[D]. 长沙:湖南大学,2008.
Qin Mengsu. The Intelligent Fire Control Algorithm of Automotive Airbag Based on Fuzzy Logic and Neutral Network[D]. Changsha: Hunan University,2008. (in Chinese)
[10]刘杰,孙吉贵,李红建,等. 基于BP神经网络的气囊点火算法模型[J]. 吉林大学学报(工学版),2008,38(2):414-418.
Liu Jie,Sun Jigui,Li Hongjian,et al. Setup of BP ANNBased Crash Sensing Algorithm[J]. Journal of Jilin University(Engineering and Technology Edition),2008,38(2):414-418. (in Chinese)
[11]JEONG H Y,KIM Y H. New Algorithm and Accelerometer Locations for Frontal Crash Discrimination[J]. Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2001,215(11):1171-1178.
[12]周航飞. 轿车前部斜角碰撞仿真及驾驶员损伤防护研究[D]. 长沙: 湖南大学, 2009.
Zhou Hangfei. A Research on Drivers' Injury Biomechanics and Countermeasures in Vehicle Oblique Impact[D].Changsha:Hunan University,2009. (in Chinese)
