基于油田管类产品堆垛机器人结构设计和强度分析
2014-12-25刘文波远桂方
刘文波, 远桂方
(1.沈阳理工大学,沈阳110168;2.沈阳工学院 机器人研究所,辽宁 抚顺113122)
0 引言
堆垛机器人是伴随着自动化立体仓库而兴起的专业起重设备,一般被人们称为堆垛机或者堆垛机器人。它是自动化立体仓库的核心设备之一,是主要的货物存取设备。随着计算机控制技术和物流仓储技术的发展,堆垛机应用越来越广泛,技术性能越来越好,同时为了满足大型立体化仓库的要求,其整体高度不停地攀升,基于特殊产品存储,堆垛机器人机构设计在某些方面需要改进。如针对某油田钻井油泵管类产品存储。直径60~150 mm,厚度10 mm,长度3~12 m不等管类产品的存储,需要设计特殊抓取装置机械手进行抓取,为了满足抓取稳定性要求,需要保证整体机构强度满足要求,特别是机械手部分强度可靠,对机械手进行机构优化设计,强度分析,满足异型堆垛机器人的高效稳定存储。
1 异型堆垛机器人概述
堆垛机器人一般由金属结构(包括双立柱、上横梁、下横梁)水平行走机构、起升机构、旋转机构、伸缩臂机构、抓取机构和电器控制柜等各大部分组成,双立柱堆垛机器人的外形结构如图1所示。

图1
水平行走机构装在机架双下横梁上,使堆垛机沿水平方向在巷道中进出运动;起升机构置于双立柱内,伸缩臂沿双立柱的导轨上下移动;两伸缩臂在起升机构作用下分别沿双立柱同步移动;使伸缩臂能停留在指令所指层;伸缩臂由二级伸缩机构组成,二级杆伸展到最大行程处停止,机械手腕部机构在二级杆上进行寻址定位,进而完成抓取(存放)动作。
堆垛机器人金属机构是堆垛机器人的主要承载部分,主要由双立柱、上横梁、两个下横梁和旋转台等部件承载。堆垛机器人整体机构简图如图2所示。整个机构原理:水平运行由四轮机构来实现,2个主动轮、2个从动轮置于下横梁,横梁端部设有缓冲器;两横梁上装有旋转平台,旋转平台上有两立柱,两立柱上有上横梁和起升机构,上平台及以上部分机构可相对下平台做0°~360°旋转运动;旋转平台上有两立柱及起升机构和平衡机构;机械手随伸缩臂沿两立柱上下移动,机械手又可以沿伸缩臂移动;上横梁安装滑轮或链轮机构、上水平导轮、电缆拖挂机构或者滑触线供电装置、平衡机构导轮等部件。

图2 堆垛机器人结构简图
2 堆垛机器人的整体控制
控制系统是堆垛机的重要组成部分,堆垛机需要在自动化立体库中穿梭并完成存取货的功能,必须具备水平行走、垂直提升、旋转、伸缩臂伸缩和抓取(放松)5个自由度,并且具备较好的速度控制和准确的定位功能。
该堆垛机器人的控制系统主要有上位机、触摸屏、PLC可编程控制器、水平行走控制系统、垂直提升控制系统、旋转台旋转控制系统、伸缩臂伸缩控制系统、机械手控制系统、层认址系统、列认址系统、货格认址系统、货物检测系统和极限保护系统等组成。由于实际要求堆垛机具备手动控制、半自动控制及计算机控制三种控制方式。其水平行走最高速度为30 m/min,垂直提升最高速度为10 m/min,最高速度为10 m/min的情况下达到±3 mm定位精度。兼顾低成本高效率的原则,确定水平行走控制选择伺服驱动器+伺服电机控制模式,垂直提升、旋转转向、伸缩臂伸缩和机械手抓取系统选择变频器+三相异步电动机控制模式,该堆垛机器人的控制系统结构拓扑图如图3所示。

图3 控制系统结构拓扑图
3 结构验算
机械手结构滑板轨道是主要的承受重力部件之一,机械手滑板轨道结构图如图4、横截面如图5。
机械手部分受力主要是支撑板(滑轨)滑轨受力,在机械抓达到最大行程处,滑轨受重力分别为F1和F2,机械手腕的支撑力F,如图4所示。机械手滑轨危险截面在中心处,应进行应力分析检验其极限强度是否满足要求。最大油管长12 m,壁厚10 mm,直径160 mm,其重力为420 kg,机械手上有伺服电机5 kg,M=450 kg。

整个机构相当于简支梁机构,可以画出立柱的弯矩图和剪力图。
F1引起的弯矩图和剪力图见图6,计算得:M1max=-146081.25 N·mm,Q1max=-551.25 N。
由F引起的弯矩图和剪力图见图7,计算得:Mmax=165375 N·mm,Qmax=1102.5 N。
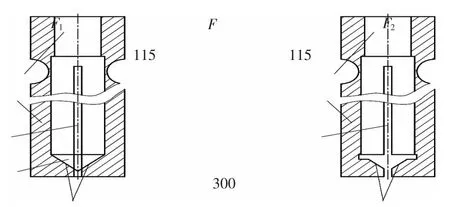
图4
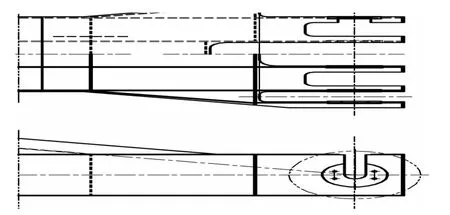
图5
F2引起的弯矩图和剪力图见图8,计算得M2max=-41343.75N·mm,Q2max=-551.25 N。
滑轨受力的合成弯矩图和合成剪力图如图9所示。从图中可以看出滑轨中心点C处为危险界面Mmax=63393.75 N·mm,Fmax=551.25 N。
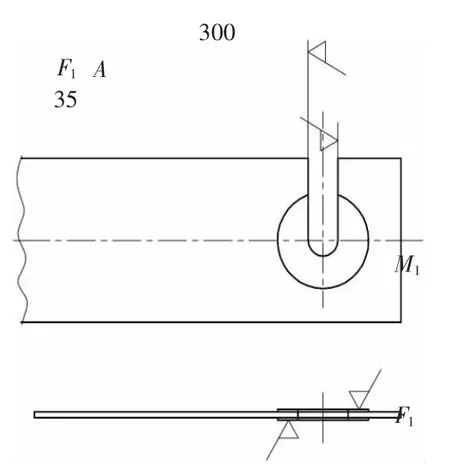
图6 滑轨上F 1及其弯矩图和剪力图
单个机械手整个滑轨结构有2个工型梁承受支承受力,每个工型梁在C点是危险截面。材料选用合金结构钢20Cr。应该验算是否满足强度要求。截面C处剪力 Qcmax=551.25 N,Mcmax=63393.75 N·mm。其横截面如图10,截面可分为3 个部分 A1、A2、A3,计算其惯性矩 Iz1、Iz2、Iz3。

图7 滑轨上F及其弯矩图和剪力图
3个截面的面积A1=225 mm2,A2=600 mm2,A3=225 mm2。
根据平衡移轴公式,3个截面对中心轴的惯性矩计算分别为:
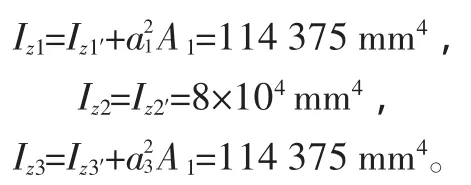
其中 Iz1′、Iz2′、Iz3′、分别为3 个截面对各自形心轴的惯性矩,将三截面对中性轴Z的惯性矩相加,得:Iz=Iz1+Iz2+Iz3=3.0875×105mm4。

图8 滑轨上F 2及其弯矩图和剪力图
计算整个截面上半部分的静矩S,得到两个截面上半部分静矩分别为:SA1=2671.875 mm3,SA2=3000 mm3。
截面的最大弯矩Mmax=63.394×103N·m,Qmax=G/8=551.25 N。
前面计算已得到Iz=3.0875×105mm4,则抗弯截面系数w=Iz/e2=1.235 ×104mm3,Iz/S=54.435 mm。
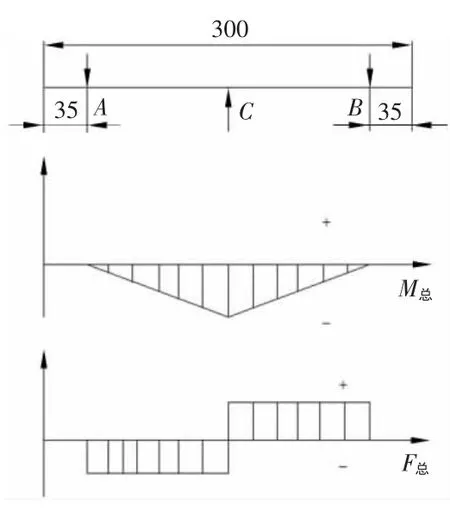
图9 滑轨总的受力及其合成弯矩图和剪力图
以下进行强度校核计算:
1)校核正应力强度。

材料的许用应力:[σ]=σs/ns=540 MPa÷5=108MPa,

图10 直轨截面图
材料的强度满足条件:σmax<[σ]。
2)校核剪应力强度。

选 σs=235 MPa,而许用应力[τ]=235÷5=47 MPa,则 τmax<[τ],满足强度条件。
4 结论
本文对异型堆垛机器人进行了机械手直轨做了静力学分析,满足力学要求,针对油田油泵类产品的自动化存储,设计出的新型堆垛机器人进行了结构论证,在传统控制系统的基础上进行了控制系统的设计论证,可满足有泵类产品的自动化、智能化存储要求。
