基于PLC的智能车库管理系统设计
2014-12-25周世强邢长达
周世强 邢长达
(安徽理工大学,安徽 淮南232000)
0 引言
随着科技的进步和我国经济的飞速发展以及城镇化建设的加快,我国的车辆大量增加,对停车场的须求日趋增大、要求也越来越高,随之出现了车辆停放系统管理方式的落后、 自动化和智能化程度低、安全可靠性能比较差、人性化和运行效率低下等一系列问题。 介于这个问题以及现在广大人民的知识水平的普遍提高和对智能控制系统的进一步了解,使得ITS 的理念更加受到人们的关注和认可。 由于PLC可靠性高,抗干扰能力强,体积小,重量轻,能耗低,系统的设计和建造相对简单易学,容易维护,容易改造等多方面的原因[1],以PLC 为核心的智能车辆出入库管理系统得到了很多专业人士的认可和使用,它不仅是智能控制系统中的高技术,更能解决许多普通停车场不能解决的问题和麻烦,也更加准确、安全和更加方便于汽车的停放。
本文在设计中也采用了PLC 技术作为整个设计的核心, 也就是以PLC 为主体对停车场进行了系统设计。 该系统最主要的是对停车场进行智能化和自动化的设计,不仅能实现车辆的自动检测、车位显示等功能,而且能够避免停车场混乱,为车主节约时间和避免交通意外,同时也减轻了停车场工作人员的工作量,提高工作效率,真正实现停车场的高效和智能化。 以防计数出现不必要的错误,系统还添加了反复程序校验,以提高整个系统可靠性。
1 系统主要功能
为让读者更好的理解系统功能,下面给出图1 车辆管理示意图。
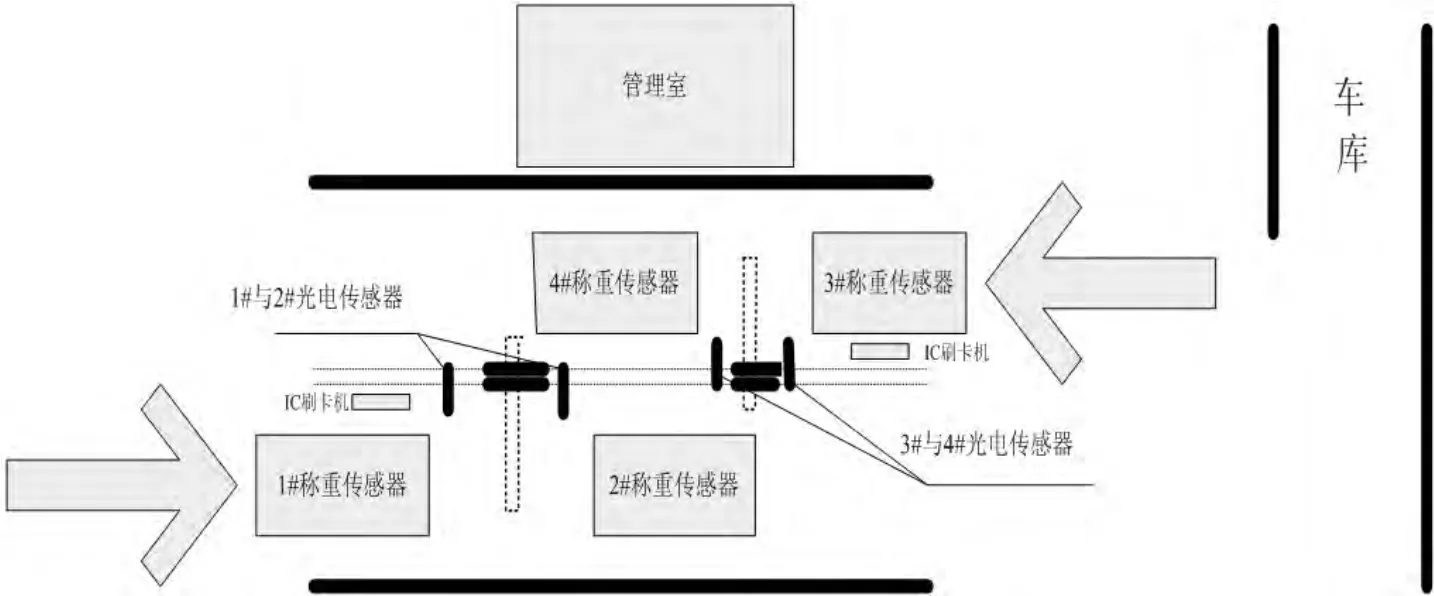
图1 车辆管理示意图
1.1 汽车检测功能
该功能主要借助IC 刷卡器、 光电传感器和称重传感器实现检测车主信息以及车辆到位情况。 当有车辆进出车库时,称重传感器会检测到车辆的到位情况,同时车主需要刷IC 卡,PLC 会将从传感器和刷卡器中接收的信息传送给上位机,上位机会从数据库中调出信息与之比较,并向PLC 发出下一步指令,当信息正确时PLC 会控制电机正转打开道闸放行, 当信息错误时会通过蜂鸣器和上位机警示灯进行报警。
1.2 道闸开关功能
该功能主要是通过PLC 驱动电动机的正反转, 实现道闸的自动开与关。当有车辆触发1# 称重传感器并且通过刷卡器刷卡,当信息检测通过后,PLC 会控制电机正转, 打开道闸放行, 当车辆紧接着触动2# 称重传感器后,PLC 会控制电机反转关闭道闸; 当有车辆出库时,触动3# 称重传感器并且通过刷卡器刷卡,当信息检测通过后,PLC 控制电机正转,道闸打开,当车辆紧接着触碰4# 称重传感器时,PLC 会控制电机反转关闭道闸。
1.3 车辆计数功能
数是PLC 通过分析光电传感器采集的信号对寄存器数自动加减。 当有车辆先触动1# 光电传感器紧接着触动2# 光电传感器时,PLC 寄存器自动加1;当有车辆先触动3# 光电传感器再触动4# 光电传感器时,PLC 寄存器自动减1。
1.4 车位显示功能
显示功能主要由出入口的LCD 屏完成。 主要用来显示车库的车位剩余量,通过PLC 软件编程,用车库总车位数减去寄存器当前数值所得数即为车位剩余量。 还可以根据用户的需求在LCD 屏上播放字幕或视频。
1.5 报警功能
该功能主要应用到蜂鸣器和上位机显示屏的警示灯。 报警源主要是在车辆检测时检测到IC 卡信息错误[2-3]。
2 系统硬件设计
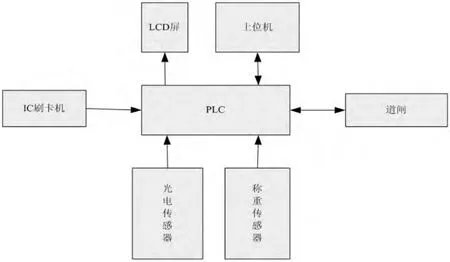
图2 系统硬件图
光电传感器采用DYW-B80 系列的慢反射传感器,最远检测距离为5 米,电源所用电压范围很宽,直流范围是10V-36V ,交流范围是90V-250V,。 该型号拥有以下特点:重复精度高、响应频率快、抗干扰性强、耐高温、防水性能好、使用寿命长、安装调试方便、性价比高。
称重传感器选用BWJ-CYB-605S-桥式称重传感器,该型号传感器具有可靠的密封结构,宽量程,高精度,性能比较稳定,并且具有很强的抗偏和抗扭能力。 电压10~24V DC, 输出灵敏度≈2.0mV/V、4~20mA、1~5V,工作温度范围-35~85℃,极限过载能力200%FS。
刷卡机采用捷顺的JSKT6022-LTIV 型, 该型号内置安装了1130读卡器,不用安装中远距离读头,自身拥有中远距离读卡的功能,而且具有双频特性,简洁、美观,可扩展外接低频触发器1131,扩大或控制有源卡的读卡范围。
道闸采用捷顺的JSDZ004,它具有双重机械自锁功能、断电手动开闸功能、时间保护功能、压力电波防砸车功能、遥控开关闸功能和工作温度控制功能等。
显示模块由15.6 寸的优派显示屏完成, 该屏的比例是现在主流的16:9,功率低,且分辨率高。
限于篇幅下面只给出上位监控系统图如图3,不做详细解释。
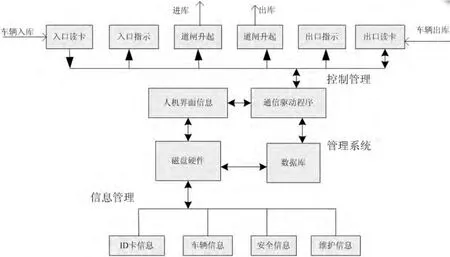
图3 上位监控系统
3 系统软件设计
图4为软件控制的流程图,上电以后系统处于复位状态,其他模块被初始化。 由图可以看到,该系统可以选择自动和手动两种工作状态,当选用手动状态时,通过触摸屏控制道闸的开关。当有车辆进入时按下触摸键命令PLC 带动电机正转打开道闸, 车辆通过后再按下触摸键命令PLC 带动电机反转关闭道闸, 与此同时当车辆先后经过1#和2# 光电传感器后PLC 寄存器自动加1; 当有车辆出库时按下触摸键命令PLC 带动电机正转打开道闸, 车辆通过后再按下触摸键命令PLC 带动电机反转关闭道闸,与此同时当车辆先后经过3# 和4# 光电传感器后PLC 寄存器自动减1。
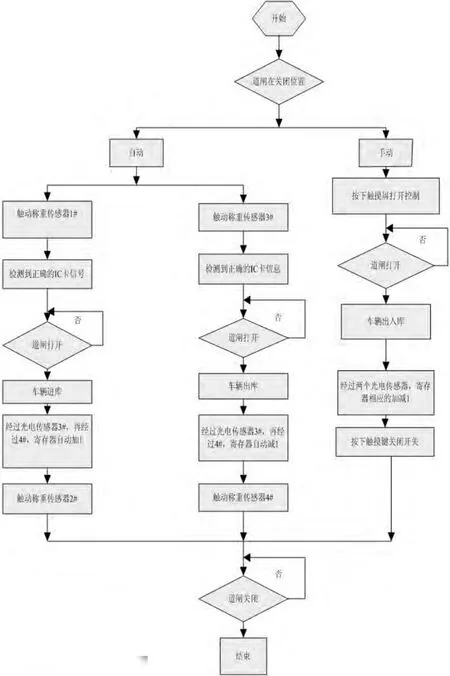
图4 系统流程图
选择自动模式,当有车辆触动1# 称重传感器准备进库,并且通过检测后,PLC 会控制电机正转打开道闸,车辆进库,与此同时当车辆先后经过1# 和2# 光电传感器后PLC 寄存器自动加1; 有车辆触动3# 称重传感器并通过检测,PLC 将控制电机正转打开道闸,与此同时当车辆先后经过3# 和4# 光电传感器后PLC 寄存器自动减1。
4 总结
本文以PLC 作为系统的控制核心,并结合现在的高新技术,将先进的信息技术、计算机、通信、自动控制、人工智能以及电子技术等有效地结合运用在停车场智能管理体系中,建立起一种在全方位发挥作用的准时、快捷、高效的停车智能管理体系,具有高度的智能化和自动化,同时具有极高的安全可靠性。该系统实现了自动检测、自动收费、道闸自动控制和故障报警等功能,满足各种大中型停车场的智能化要求。
[1]姚伟红.城市交通面临的问题及解决途径[J].山西交通科技,2007.
[2]曹建军,史忠科.小区停车场智能管理系统设计[J].计算机工程与应用,2009.
[3]蔡纪鹤,赵德安.智能小区停车场管理系统的设计[J].电气应用,2008.
