HKTL 动力调谐陀螺仪应用研究
2014-12-24张文博
张文博
(西安方元能源工程有限责任公司 陕西 西安)
0 引 言
近几年来,陀螺仪在定方位射孔和井迹测量中应用的越来越多,同LX 连续测斜仪相比,陀螺仪相对来说比较复杂和难以理解,在这些施工应用中容易出现应用偏差,本文根据作者的应用经验详细的介绍了动力调谐陀螺仪在这些施工中的应用中判断检测该仪器的方法。
1 陀螺仪和连续测斜仪器的区别[1]
陀螺仪和连续测斜仪都具有测出井斜和方位功能,但是定方位射孔中要用陀螺仪而不能用连斜,这就涉及到陀螺仪和连斜仪器的原理不同,适用的场合也不同。
连斜井斜测量是基于加速度计传感器,方位测量是基于加速度计传感器和磁通门,它的方位值测量依赖于地球的磁场。
动力调谐陀螺仪井斜测量是基于加速度传感器,方位测量是基于加速度计传感器和陀螺体传感器,它的方位值测量不依赖于地球的磁场,而是依赖于地球上不同经度纬度处,地球自转在陀螺体上产生力的分量不同。陀螺仪方位测量和地球的磁场没有任何关系,所以陀螺仪可以在无磁和有磁的环境中都可以使用。
但在这里必须要清楚一个概念,就是方位的概念,方位角(azimuthangle):从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,通常在精密测量中使用。
2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角。
3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角。
连斜方位的测量是根据地球的磁北极,所以连斜输出的是磁方位角,测井仪修工房的连斜效验台也是以地球的磁北极作为基准效验的。而陀螺仪方位的测量是根据地理北极,所以陀螺仪测量的是真方位角。陀螺仪的方位角和连斜的方位角之间有一定的偏差,这就涉及到地磁偏角的概念,地磁偏角指的是地球上任一处的地磁北向和地理北向之间的夹角,在定边县大概是偏西2°。这一点要非常注意,不然就会出现方位偏差。
2 陀螺仪定向和非定向两种测量方式的区别
在定方位射孔时要选择定向测量方式,在井轨迹测量时要选择非定向方式。陀螺仪测量界面上的输出参量很多,有重力高边值,陀螺高边值,方位值,斜度值,陀螺角速度IX、IY,和加速度AX、AY值。
1)陀螺高边
陀螺高边在测斜仪中指的是陀螺x 轴的方向,一旦仪器装配完成,在陀螺正常的情况下,这个陀螺高边就是一个相对固定值。
陀螺高边一般情况是在井斜小于5°的情况下使用,主要用于开窗定向和调整动力钻具的方向是陀螺工具面的一个参数。
2)重力高边
重力高边是相对于井下仪自身而言,其定义为x轴与地球重力垂线之间的夹角,读数范围为-180° ~180°。读取方式为面向井下仪器顺时针0° ~-180°,逆时针为0° ~ +180°。设定为±180°的目的是为了现场应用时便于理解和操作。实际上这个夹角应为重力线的反方向与重力加速度计x 轴的夹角。
重力高边的作用和陀螺高边的作用相仿。
也就是说在非定向的井眼轨迹测量中,只需要看陀螺仪输出的井斜值和方位值,不需要管其他参量。在定向射孔时,不需要管陀螺仪输出的方位值和斜度值,只需要测量准高边初始值,再在仪器自旋时,看陀螺高边的值就可定出方位。
陀螺仪姿态固定后,在旋转陀螺时,显示的方位值,斜度始终不变,因为显示的方位值,斜度值是仪器轴线的方位值和斜度值,在旋转仪器轴时,陀螺高边值或重力高边值会有相应的变化,定方位就靠仪器轴的旋转显示的陀螺高边值或重力高边值来实现定方位。
油井的轨迹测量过程中测量的是陀螺仪轴线的方位和斜度,所以它和重力高边、陀螺高边这些值没有关系。这些和陀螺仪的测量原理有关。
陀螺测斜仪的核心部件就是惯性测量组,惯性测量组由对转控制机构在测量点上的0°和180°上定位。惯性体组件的旋转轴与井下探管轴重和,通过探管扶正器又可认为与井筒轴线平行。动力调谐陀螺和石英加速度计都工作在力反馈状态,陀螺测量地球自转角速率分量,加速度计测量重力加速度分量,它包括一个双轴动力调谐陀螺和两个石英加速度计,给出陀螺角速度IX、IY,和加速度AX、AY,通过这四个参量来求。双轴动力调谐陀螺仪两个测量轴分别对准x、y 轴,两个加速度计的测量轴分别对准x 和y 轴,陀螺测量地球自转角速率分量,加速度计测量重力加速度分量,它们测得的分量IX(ωx)、IY(ωy)、AX、AY用来计算方位、倾斜和工具面角。
陀螺仪输出的是惯性体组件的旋转轴方位和斜度值。所以在井眼轨迹测量时,旋转轴方位和斜度改变时,陀螺仪输出的方位值和斜度值才改变,在定方位时,惯性体组件的旋转轴方位和斜度是固定的,仪器自转时,陀螺仪的角速度和加速度计在X 方向和Y 方向的分量值改变,但这些分量的合值不变,此时仪器输出的方位值和斜度值不变,变得只是陀螺高边值和重力高边值。
3 陀螺仪在定方位射孔时的操作要领和注意事项[2]
陀螺仪在定方位射孔操作前,必须进行初始化设置,初始化设置是为了让陀螺仪输出的数值准确。初值设置界面如图1 所示。
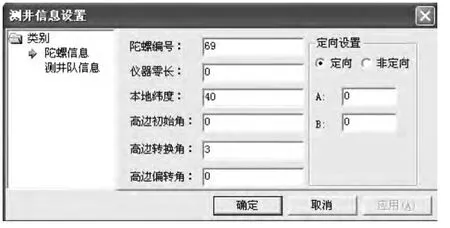
图1 陀螺仪初始化设置界面
在进行初始设置时:陀螺编号一定要设置对,陀螺编号对应着刻度文件,刻度文件加载错误后,仪器输出的值会严重有偏差。本地纬度值要询问井队或者通过查询得到,一定要设置对,陀螺仪要根据纬度值计算输出方位角,井斜角,工具面角等参数。
陀螺仪初始化设置界面中高边初始角指的是重力高边初始角,而不是陀螺高边初始角,这点一定要注意,只有重力高边初始角测量准确了定方位的数值才能准确。测量重力高边初始角时,把仪器放平,让定位槽垂直冲天,把水平尺放在槽上面,保证水平尺“水泡”居中(这样做的目的就是为了保障定位槽一定是垂直冲天的)。把高边转换角改为0°,让仪器输出重力高边,把测量出的重力高边值输入“测井信息设置”中“高边初始角”,重新回测,在引鞋口垂直冲天的状态下,“高边初始角”再测值为“0”,才算测量准确。测量准确后,在定方位时,在斜度比较小的井中,陀螺高边的值就和实际的方位值能够对应的上,即陀螺高边值为40 时,实际定的方位也为40,仪器在自传时,旋转90°时,IX、IY和AX、AY值倒置。
高边转换角可以根据需要设置,一般设置成3°,重力高边的输出值比陀螺高边的输出值要准确。在斜度较小时,方位值已经没有意义了,此时定方位要靠陀螺高边的值,在斜度较大时,测出的方位值就比较准确了,此时定方位时要参考重力高边的值和显示的方位值。高边转换角的设置只是让测量软件显示陀螺高边值还是重力高边值,当然实际测量时,软件会同时算出重力高边值和陀螺高边值,高边转换角的设置只是让软件显示重力高边值还是陀螺高边值。
陀螺仪自旋时,显示的方位值,斜度始终不变,因为显示的方位值,斜度值是仪器轴线的方位值和斜度值,在仪器姿态固定后,方位值和斜度值始终是固定的,在旋转仪器轴时,旋转多少度,陀螺高边值或重力高边值就会有相应的变化,定方位就是靠仪器轴的旋转显示的陀螺高边值或重力高边值的变化来实现的。
在完全斜度大于3°以后,仪器固定在某一个位置,改变高边转换角,陀螺仪测量界面就显示重力高边值或陀螺高边值,重力高边值+方位值=陀螺高边值。
高边偏转角指的是显示的高边和实际高边的差值,一般设置为0,A 和B 值指的是射孔枪的抢眼和定位槽之间的夹角,要根据实际值设置。
定方位射孔时,参数的设置,比如目标方位,在测量界面下面的数值上直接更改。
4 陀螺仪在非定向方式下操作注意事项
动力调谐陀螺仪目前测量井眼轨迹采用点测的方式,不能像现有连斜那样连续测量。在测量时,根据需要每隔一段距离测量一组数据,每次在测量数据以前,必须要让仪器在此测量点悬停几分钟,等仪器稳定后在测量数据。因为根据陀螺仪测量原理,只有等陀螺转子旋转稳定后,力矩器上输出的力才比较准确。如果在启动测量后,仪器不稳定,而有晃动,此时读取的数值不但不准确,而且这样还有可能损坏陀螺仪。
5 陀螺仪在井场上常见故障的判断和排除
陀螺仪有自己配套的地面系统,在实际使用时只需要用电缆把陀螺仪下井仪和陀螺仪地面处理面板相连,再把马丁代克输出的深度和张力信号连入陀螺仪的地面处理面板即可。陀螺仪下井仪器的供电由陀螺仪配套的地面面板供给,井下仪与地面系统采用曼彻斯特II 码半双工方式通信,供电和信号传输复用一根缆芯,电缆外皮作为信号和供电的回路。
陀螺仪比较珍贵和脆弱,在运输过程中很容易发生损坏,陀螺仪正常工作时,下井仪器供电为145 VDC,电流为100 mA,而且电流和电压比较稳定,如果在井场测试时发现,陀螺仪电流偏大或者偏小20 mA以上,则陀螺仪下井仪电路肯定有问题,此时根据情况排除;如果电流大到170 mA 以上,此时最大的可能就是陀螺体挠性接头损坏,陀螺旋转由三相16 VAC 410 Hz驱动,旋转12 300 r/min,如果挠性接头损坏,就会导致陀螺无法旋转,此时只能返回厂家更换新的陀螺体,当然陀螺体一般不会损坏,但陀螺体比较脆弱,在有大的冲击和震动情况下挠性接头就很容易断裂;如果电流偏小20 mA 以上,则有可能是电路舱,微机舱中某一部分电路没有供上电,井场上对这种情况一般很难维修,只能返回仪修工房。
陀螺仪在井场上出现比较多的还有通信问题。陀螺仪的通信涉及到笔记本电脑和地面箱体面板之间的通信,地面箱体面板和井下仪器之间的通信。地面箱体面板如果和笔记本电脑之间通信异常,此时要先检查USB 接口连接是否可靠,USB 驱动安装是否完好,笔记本电脑上安装的软件补丁是否打好。有时会出现通信上一口井完好,下一口井突然有问题,这种情况一般是由病毒和杀毒软件引起的;如果是地面箱体面板和陀螺下井仪之间通信有问题,这时首先要检查测井电缆的通断绝缘,小马龙头的通断绝缘,接插件是否完好,在这些都完好的情况下,一般是下井仪电路故障,下井仪电路故障只能返回驻地或者厂家维修。
6 结束语
对动力调谐陀螺仪的理解和掌握是一个循序渐进的过程,在平时使用时多去思考,多去揣摩,在通过查找相关资料,掌握陀螺仪的原理及作用,才能更好地使用应用陀螺仪,发扬其效用。
[1]周白令.动力调谐陀螺仪设计与制造[M]. 南京:东南大学出版社,2002
[2]HKTL-38 陀螺测斜操作手册. 北京航天凯悦科技有限公司,2010(资料)
