基于模糊控制的智能车辆纵向加速度跟踪控制器设计
2014-12-24朱增辉徐友春马育林李建市李永乐
朱增辉,徐友春,马育林,李建市,李永乐
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 军用车辆系,天津300161)
纵向控制是智能车辆技术的重要组成部分,是智能车辆实现自主驾驶最基础、也是最关键的技术之一[1]。目前,常用的智能车辆纵向控制决策变量有车间距离、车辆速度和加速度3 种。其中,加速度相对于其他两项对车辆状态变化的反馈要快得多,因此,本文选取加速度作为控制目标,实现期望加速度的跟踪控制[2]。
1 实车实验平台简介
智能车辆纵向控制系统包括油门控制、制动控制和换挡控制3 个部分。
1.1 油门控制
油门控制器的接口为5 个TTL 电平的I/O 口,分别定义为ACC_INC(加油)、ACC_DEC(减油)和BM1、BM2、BM3。其中,BM1、BM2、BM3 端口用来控制单次加、减油动作。执行器实施油门控制时,离合器结合,直流电动机通过减速器和离合器带动油门拉线运动;需要解除油门控制时,电磁离合器断电分离,油门拉线回归零位。
1.2 制动控制
制动控制器由DMC 三轴运动控制卡、驱动器、三相步进电动机以及电磁离合器构成。运动控制卡为PCI 接口,将其安装在工控机的相应插槽内,调用运营商提供的运动控制函数,通过外部接口卡将控制信号传送至驱动器,驱动器进一步驱动电动机。当电磁离合器通电结合时,电动机转动,同时拉动与制动踏板相连的钢丝拉绳,达到制动效果。
1.3 换挡控制
换挡操作采用的是直线运动的直流电动机推杆,通过电动机的伸缩运动拉动换挡杆。同时,单片机系统不断检测挡位信号,当达到目标挡位时立即停止电动机运动,完成换挡动作。直流电动机的双向运动通过两个继电器的开关状态切换来完成。
2 纵向加速度跟踪控制器设计
2.1 发动机系统模糊控制器设计与实现
通常情况下,考虑车辆乘坐舒适性的需要,驾驶员通常将车辆纵向加速度限制在-2 ~1 m/s2的范围内[3],目标加速度一般不大于1 m/s2,因此,对发动机系统的控制采用经典的模糊控制器。
2.1.1 输入输出语言变量的选取
发动机系统模糊控制器以上位机决策的目标加速度与车辆当前的加速度的差值e和差值的变化率ec为输入变量,以油门踏板行程增量u作为控制器的输出。
2.1.2 输入输出语言变量论域与隶属度函数的选取
由于车辆在加速过程中,加速度一般不大于1.5 m/s2,因此取偏差e的基本论域为[-1.5,1.5],模糊输入量E的论域为{-1.5,-1.0,-0.5,0.0,0.5,1.0,1.5};取偏差变化率ec的基本论域为[-3.0,3.0],模糊输入量EC的论域为{-3. 0,-2. 0,-1.0,0.0,1.0,2.0,3.0};取输出控制量u的基本论域为[-3,3],模糊输出量U的论域为{-3,-2,-1,0,1,2,3}。因此,输入量e和ec的量化因子Ke、Kec以及输出量的比例因子Ku均为1。e、ec和u的语言变量E、EC和U选取7 个语言值{NB,NM,NS,ZE,PS,PM,PB},分别对应负大、负中、负小、零、正小、正中、正大。语言变量E、EC和U的隶属度函数均采用三角形函数(如图1、2 所示)。
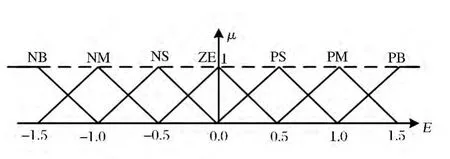
图1 输入偏差E 的隶属度函数

图2 输入偏差变化率EC 与输出控制量U 的隶属度函数
2.1.3 模糊推理规则的设计
归纳分析输出控制量在各个阶段相对于不同的偏差和偏差变化率的规则,建立模糊推理规则(见表1)。
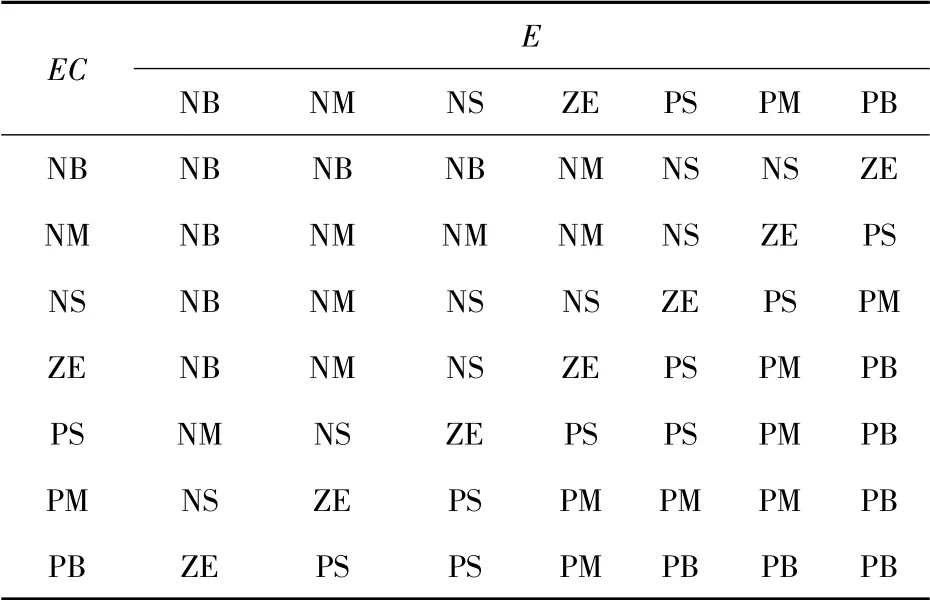
表1 模糊推理规则
2.1.4 系统输出量模糊规则与反模糊化
根据输出控制量U的隶属度函数(图2)和模糊推理规则(表1),建立u的模糊规则(见表2)。
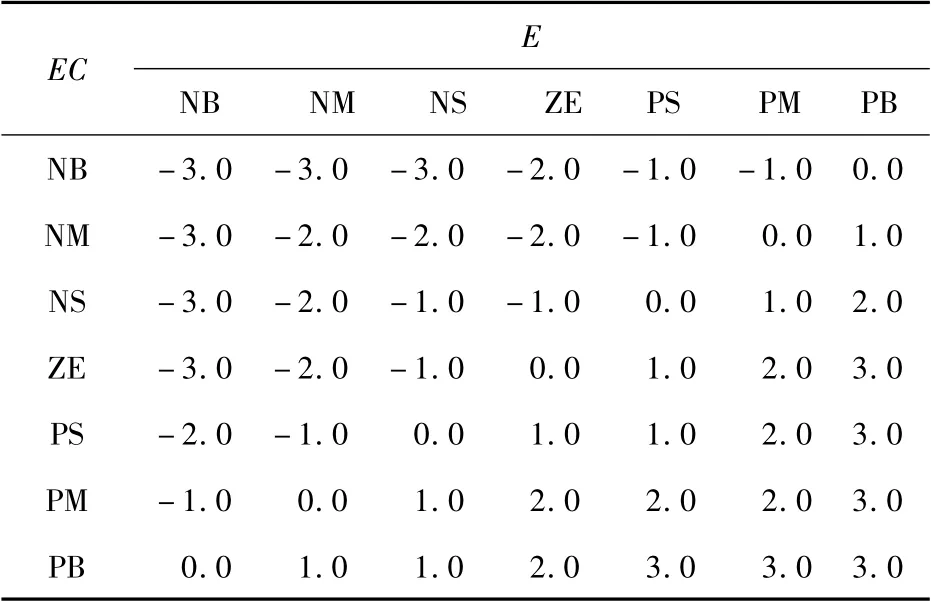
表2 系统输出量u 模糊规则
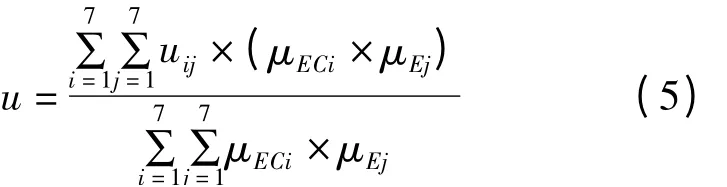
模糊控制器输出量的反模糊化方法有最大隶属度法、重心法、面积平分法等,本文采用重心法。输出量u的计算公式为
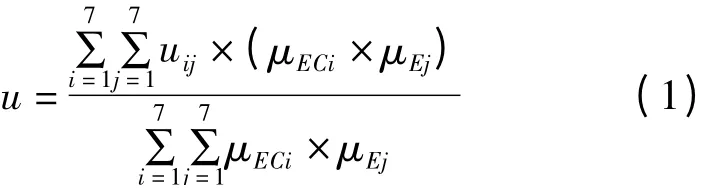
式中:uij为u在模糊规则表中第i行、第j列输出量的值;μECi和μEj分别为输入量ec和e对应于ECi、Ej的隶属度值。
油门执行机构的输出控制量为整数,因此进行取整运算得到最终的输出控制量,即u=[u]。由此,得到油门执行机构的控制量u通过车辆加速度传感器反馈的信息,依此过程不断对油门执行机构进行控制调整,控制车辆达到上位机决策的期望加速度。
2.2 制动系统变论域模糊控制器设计与实现
车辆在制动减速的过程中,制动减速度可能会有较大的变化,为了能够快速而又准确地对车辆制动减速度进行控制,制动系统控制器采用基于模糊推理的变论域模糊控制方法。
2.2.1 输入输出语言变量的选取
制动系统模糊控制器以上位机决策的期望加速度与车辆当前的实际加速度的差值e和差值的变化率ec为输入变量,以制动踏板行程增量u作为控制器的输出。
2.2.2 输入输出语言变量论域与隶属度函数的选取
由于车辆在制动减速过程中,最大制动减速度约为-7 m/s2,因此取偏差e的基本论域为[-7.0,7.0],模糊输入量E的论域为{-7.0,-4.0,-2.0,0.0,2.0,4.0,7.0};取偏差变化率ec的基本论域为[-7.0,7.0],模糊输入量EC的论域为{-7.0,-4.0,-2.0,0.0,2.0,4.0,7.0};取输出控制量u的基本论域为[-400,400],模糊输出量U的论域为{-400,-230,-115,0. 0,115,230,400}。因此,输入量e和ec的量化因子Ke、Kec以及输出量u的比例因子Ku均为1。e、ec和u的语言变量E、EC和U选取7 个语言值{NB,NM,NS,ZE,PS,PM,PB},分别对应负大、负中、负小、零、正小、正中、正大。语言变量E、EC和U的隶属度函数均采用三角形函数(如图3、4 所示)。
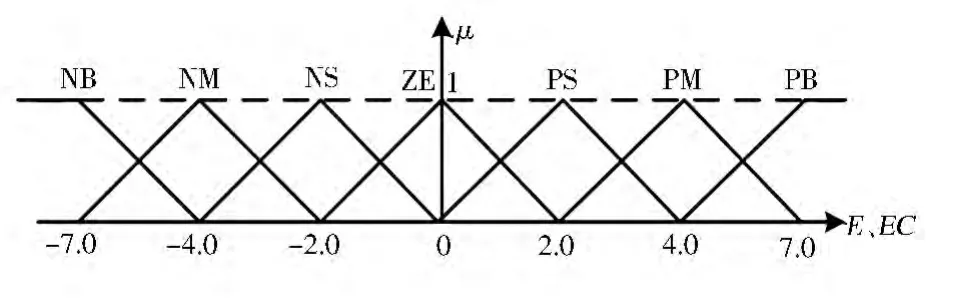
图3 输入偏差E 和偏差变化率EC 的隶属度函数

图4 输出控制量U 的隶属度函数
2.2.3 模糊推理规则的设计
(1)伸缩因子模糊控制器[4-5]。模糊控制器的输入误差e和误差变化率ec论域伸缩因子的模糊划分为B、M、S、Z,对应峰值点为1、0. 75、0. 5和0.25,隶属函数采用三角形函数(如图5 所示)。输出论域的模糊划分为B、M、S、Z,对应峰值点为1、0.833 3、0.666 7、0.5,隶属函数采用三角形函数(如图6 所示)。
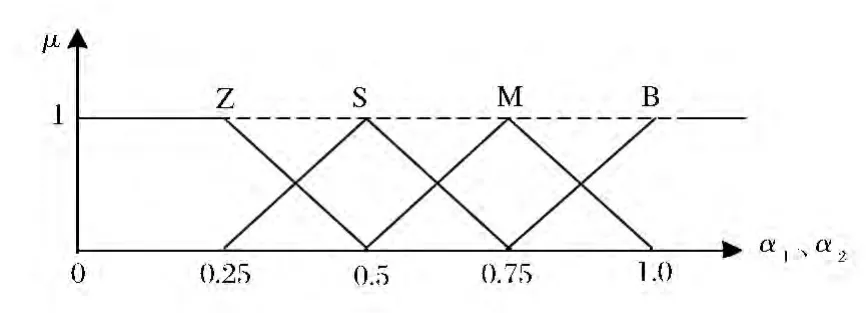
图5 误差和误差变化率伸缩因子的隶属度函数
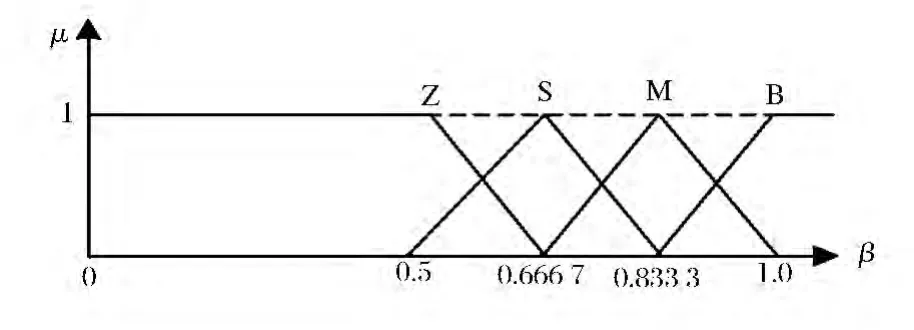
图6 控制器输出量伸缩因子的隶属度函数
(2)系统模糊控制器。制动系统控制车辆加速度的响应过程与发动机系统控制车辆加速度的响应过程类似,其模糊推理规则见表1。
2.2.4 模糊规则表与反模糊化
(1)伸缩因子模糊控制器。根据模糊推理规则(表1)和隶属度函数图(图5、6),可以得到α1、α2、β 的模糊规则(表3—5)。
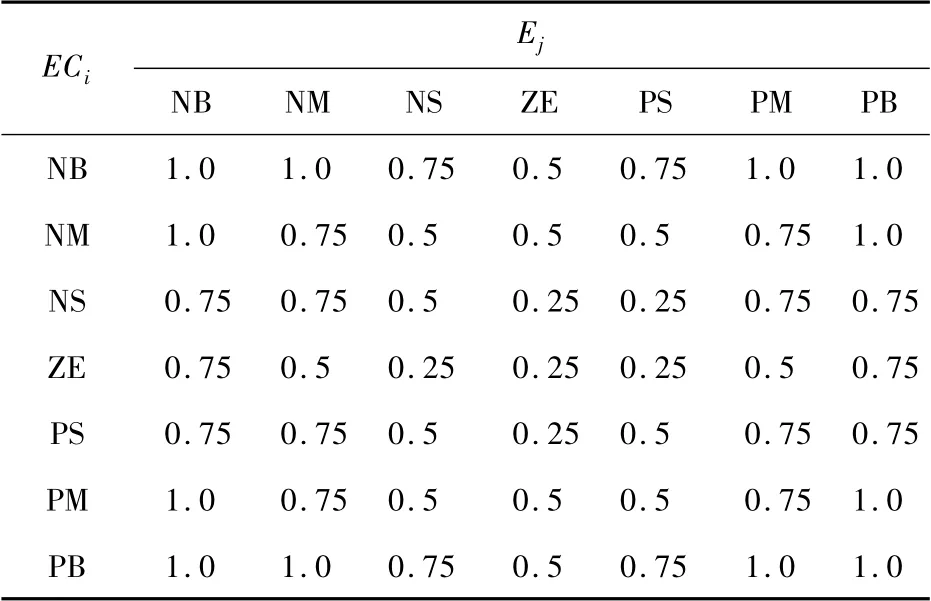
表3 伸缩因子α1 的模糊规则
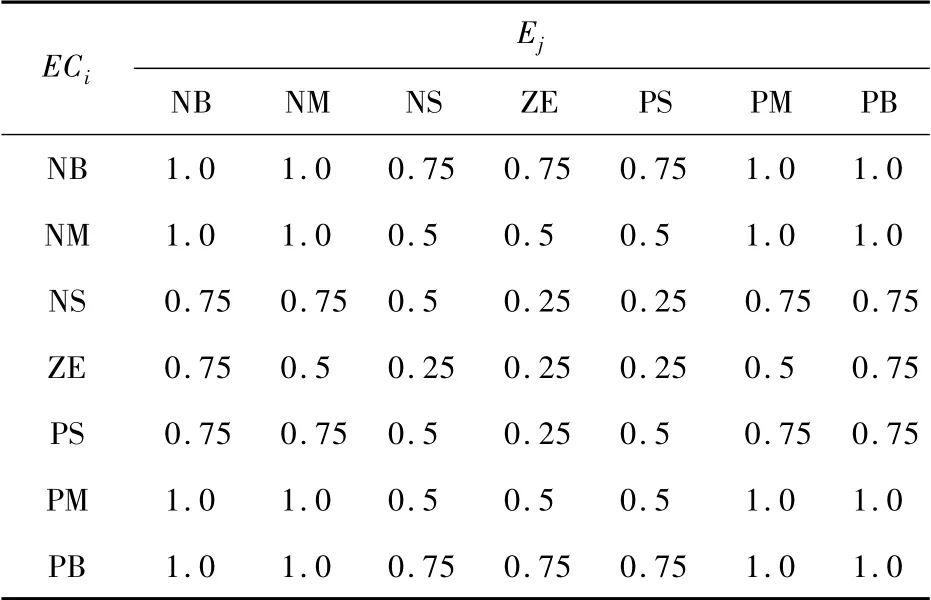
表4 伸缩因子α2 的模糊规则
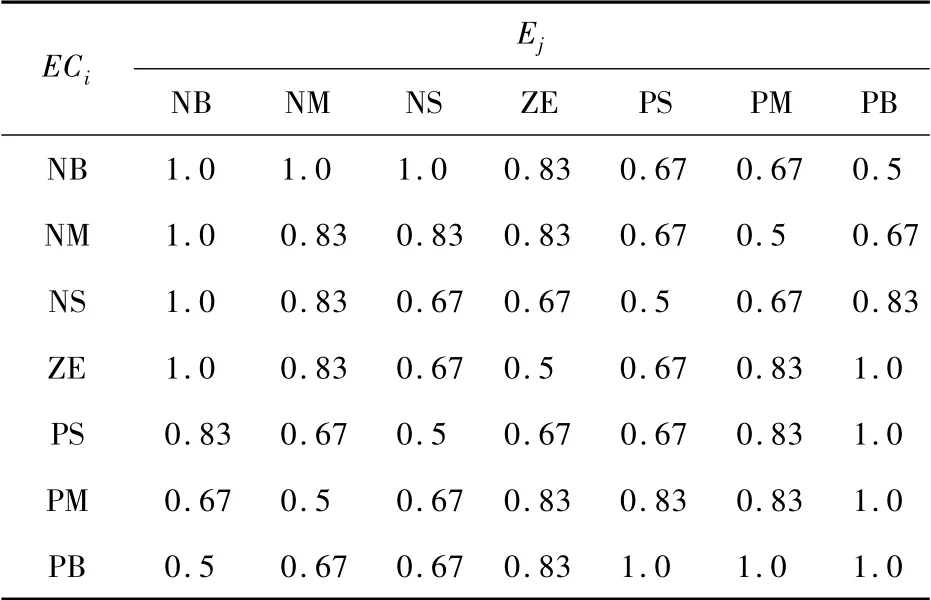
表5 伸缩因子β 的模糊规则
伸缩因子α1、α2、β 的反模糊化过程采用重心法,其计算公式如下:

式中:α1ij、α2ij、βij分别为α1、α2、β 在相应的模糊规则表中第i行、第j列的输出量的值;μECi和μEj分别为ec、e对应于ECi、Ej的隶属度值。
伸缩因子模糊控制器得到伸缩因子α1、α2、β的清晰化量后,将系统模糊控制器输入变量E和EC的论域调整为α1E、α2EC,输出变量U的论域调整为βU。
(2)系统模糊控制器。根据系统输出量的模糊推理规则(表1)和输出量U的隶属度函数(图4),以及伸缩因子模糊控制器计算得到的输出量U的伸缩因子β,得到系统模糊控制器输出量u的模糊规则(见表6)。

表6 系统输出量u 模糊规则
输出量u的反模糊化采用重心法,其计算公式为
式中:uij为u在模糊规则表中第i行、第j列的输出量的值;μECi和μEj分别为输入量ec和e对应于ECi、Ej的隶属度值。
制动系统执行机构的输出控制量步进电动机运动的步数为整数,因此进行取整运算得到最终的输出控制量,即u=[u]。
3 实验与分析
设计实验测试算法对各种不同期望加速度的跟踪效果。车辆以5 km/h 左右的速度行驶,设定车辆的目标加速度为1. 0 m/s2,当车速达到80 km/h 时,保持2.5 s 后,设定车辆的目标加速度为-0.5 m/s2,车速减至50 km/h 时,设定车辆目标减速度为-1.5 m/s2,车速减至30 km/h 时,设定车辆目标减速度为-3.0 m/s2,直至停车,设定目标加速度为0 。程序控制周期和数据采集周期均设置为100 ms,记录整个过程中车辆的加速度和速度以及油门踏板和制动踏板的行程变化情况。
实验中记录的车辆加速度和速度变化情况如图7 所示,油门控制与制动控制曲线如图8 所示。

图7 车辆速度和加速度变化曲线
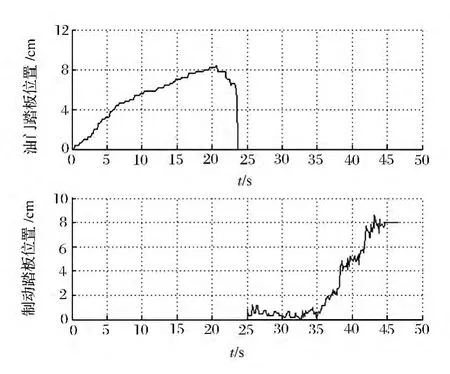
图8 油门控制与制动控制曲线
由图7、8 可知,速度在上升过程中加速度基本稳定在目标加速度1.0 m/s2。在此过程中,通过对油门的控制来实现对加速度的跟踪,车辆在80 km/h 定速巡航阶段,对油门的控制有小幅波动,当设定加速度为-0.5 m/s2时,油门控制解除,此时油门的踏板位置为0。当车速减至60 km/h 左右时,发动机倒拖无法提供足够的阻力矩使车辆的加速度达到-0.5 m/s2,此时,制动系统开始工作。从图中制动控制曲线可以看出,随着目标加速度的增大,为了提供足够大的制动力,制动踏板位置在不断增大。
4 结 语
由于汽车发动机大滞后、时变、非线性的复杂特点,本文选用对非线性系统具有很强的适应性的模糊控制作为车辆纵向加速度控制算法。根据车辆在加速和减速过程中的特点,分别设计了节气门执行机构模糊控制器和基于模糊推理的制动系统变论域模糊控制器。实车实验表明,本文设计的基于模糊控制器的纵向加速度跟踪控制器能够满足车辆对不同加速度进行跟踪控制的要求。
[1] 谯艳娟,李以农,李应全. 模糊控制在汽车制动纵向控制中的应用[J].汽车研究与开发,2003(3):25-29.
[2] 马育林,吴青,张蕊,等.模拟自治车队行驶过程变工况速度跟踪控制[J].机械工程学报,2011,47(7):140-147.
[3] 李洪兴.非线性系统的变论域稳定自适应模糊控制器[J].中国科学:E 辑,2004,32(2):211-223.
[4] 高振海,朱永强,田雷. 汽车自适应巡航系统的模糊自校正控制算法[C]//中国汽车工程学会汽车电子技术分会第七届(2006)年会暨学术研讨会论文集,2006:29-33.
[5] Naranjo J E,González C,Reviejo J. Adaptive fuzzy control for inter-vehicle gap keeping[J]. IEEE Trans. Intell. Transp.Syst.Special Issue on ACC,2003,4(3):132-142.
