基于主成分分析的部队摩托化机动系统可靠性评价
2014-12-24李延通范精明孙大伟
李延通,范精明,孙大伟
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 训练部,天津300161;3.军事交通学院 院务部,天津300161)
(3)计算R 矩阵的特征值与特征向量。采用雅可比(Jacobi)方法计算相关系数矩阵R 的特征值与特征向量。
解上式方程得p 个特征值:λ1≥λ2≥…≥λp≥0。
求得对应的特征向量L 为
部队摩托化机动是我军快速机动反应的最主要方式之一。我军现行的部队摩托化机动规章制度和组织模式仍处于传统阶段,已难以满足现代战争对机动能力的高要求,因此必须对部队摩托化机动相关问题加以研究[1]。
1 部队摩托化机动系统内涵界定
部队摩托化机动系统是由多个既相互区别又相互联系的单元集合而成的,该系统以待机动部队为对象,以完成部队的机动任务为目的。最基本的部队摩托化机动系统由人员子系统、车辆子系统、道路子系统、环境子系统、组织指挥子系统和勤务保障子系统组成[2]。
本文所研究的部队摩托化机动系统可靠性是指部队摩托化机动系统在特定条件下、规定时间内完成指定机动任务的能力。我军对摩托化机动系统可靠性的要求主要体现在3 个方面。
(1)在平时演习、训练任务中,能够将参演人员、物资器材、武器装备在规定的时间内,运抵演习地域,保障演习任务按时、顺利开展。
(2)在参与抢险救灾、维稳处突等非作战军事任务时,能够以较高的服务水平在规定时限内将救灾人员、物资、装备运抵灾区,将维稳处突部队运达指定地域。
(3)在信息化条件下的局部战争中,在遭受敌精确打击条件下,仍能做出快速反应,在规定时间内,将作战人员、物资器材、武器装备运抵战斗集结地域。
2 部队摩托化机动系统可靠性影响因素分析
部队摩托化机动系统可靠性受多种因素的影响,现从人员、道路、环境、组织指挥、勤务保障等方面对影响部队摩托化机动系统可靠性因素加以分析。
2.1 人员因素
(1)驾驶员素质。驾驶员是摩托化机动过程的主要参与者,驾驶员的素质直接影响到摩托化行军的速度、安全性、协同性等方面,进而影响摩托化机动系统可靠性。
(2)装卸人员素质。装卸是摩托化机动的重要环节,装载的质量及效率,不仅影响摩托化机动的时效性,而且直接影响实际运输的效果。
(3)组织指挥人员能力。组织指挥人员是整个摩托化机动任务的组织者,在机动过程中起到组织协调的作用,其组织指挥能力直接影响摩托化机动系统可靠性。
(4)待机动人员素质。待机动人员是摩托化机动的对象,待机动人员的素质,直接影响摩托化机动系统的效率及稳定程度,从而影响摩托化机动系统可靠性。
2.2 车辆因素
(1)车辆性能。包括车辆的动力性、燃料经济性、操纵稳定性等方面,车辆性能直接决定车辆的行驶速度、稳定性及事故率,进而对摩托化机动系统可靠性产生本质影响。
(2)车辆可用度。指建制部队车辆的可使用情况,即车辆的新旧程度、完好率等,车辆可用度高可大幅度降低在途车辆事故出现率,提高车辆可支配度,从而为摩托化机动系统可靠性提供装备保障。
(3)车辆协同性。指在摩托化机动过程中,车辆之间具有一定的协调性,如行车编队中大小车比例、重车比例等,车辆协同性反映了行驶车列对突发事故的应急处理能力。
(4)车辆可维修性。指车辆可维修程度,直接影响车辆维修的效率,在途车辆的可维修性关系到物资、人员、装备的输送效率,进而影响摩托化机动系统可靠性。
2.3 道路因素
(1)道路等级。公路等级划分为高速公路、一级公路、二级公路、三级公路、四级公路5 个等级。高等级公路较低等级公路具有技术状况好,通行能力大等特点,是影响摩托化机动的主要因素。
(2)道路线形。指道路在空间的几何形状和尺寸,常用道路平面线形、纵断面线形和横断面来表示。道路线形影响行车速度、视野,进而影响摩托化机动系统可靠性。
(3)路面状况。主要指路面的铺面率、铺面等级和损坏程度,直接影响行车速度和安全。
(4)交通设施完好率。公路网交通设施和交通标志是路网的重要配套设施,交通设施完好情况不仅影响公路网各个路段的交通服务水平、安全性,而且关系到整个路网服务功能的发挥,直接影响区域路网的可靠性,进而影响我军摩托化机动可靠性。
(5)隧道通行高度。隧道通行高度是隧道对通行车辆高度的限制,摩托化机动过程中,很多装备的运输属于超限运输,对隧道的要求较高,因此,隧道通行高度直接影响摩托化机动的可靠性。
(6)桥梁承载能力。桥梁承载能力是对通行车辆重量的限制,摩托化机动过程中,重型装甲装备的运输对桥梁承载能力要求极高,因此,桥梁承载能力也是影响摩托化机动可靠性的主要组成部分。
2.4 环境因素
(1)气候条件。不同的气候对公路网会造成不同的影响,也会对车辆行驶状况加以干扰。
(2)地形地貌。地形地貌影响公路的选线、走向、平缓度、坡度、曲率等,同时还影响车辆行驶速度、驾驶员视觉效果等。
(3)饱和度。指公路实际车流量和设计流量的比值,是反映道路服务水平的重要指标之一,饱和度值越高代表道路服务水平越低,进而影响车辆的行驶速度及机动性。
(4)交通流密度。交通流是指汽车在道路上连续行驶所形成的车流;交通流密度是指交通流的疏密程度,即道路单位长度上含有车辆的数量。
2.5 组织指挥因素
(1)组织指挥机构水平。组织指挥机构的健全规范程度、指挥关系的明晰度直接关系组织指挥的能力,组织指挥是摩托化机动的核心,其能力的大小直接影响摩托化机动系统的可靠性。
(2)组织指挥方法。组织指挥方法的科学、合理性是部队摩托化机动能否顺利实施的关键,错误的指挥方法会导致摩托化机动的失败,造成巨大损失。
(3)组织指挥协调能力。指组织指挥各环节、各部门协调能力,需相关人员协调好人力、物力及财力等资源,为摩托化机动提供可靠保障。
(4)组织指挥信息化水平。信息化水平直接影响组织指挥的效率,信息化指挥系统及现代通信方法的运用,大大提高了组织指挥的效率和安全性。
2.6 勤务保障因素
(1)车材油料保障能力。保障车辆器材数量和质量,以及摩托化机动过程中的油料供应,是摩托化机动任务顺利完成的基础。
(2)技术保障能力。技术保障主要指车辆的修理。摩托化机动过程中,由于机动距离远,动用车辆多,运输任务重等原因,在途车辆很可能会出现故障,对故障车辆进行及时有效地维修是提高摩托化机动可靠性的重要手段。
(3)警戒勤务保障能力。主要指部队侦察、交通管制、交通防卫等能力,在机动过程中,要不断勘察路线,了解敌情,实施交通管制,适时进行伪装,以提高摩托化机动系统可靠性。
(4)生活保障能力。生活保障主要包括财务、卫生勤务、军需、野营物资等保障,该项能力是部队摩托化机动系统可靠性得以保障的基石。
3 部队摩托化机动系统可靠性评价
3.1 评价指标体系的建立
以上述影响因素为研究对象,建立部队摩托化机动系统可靠性指标体系(如图1 所示)。
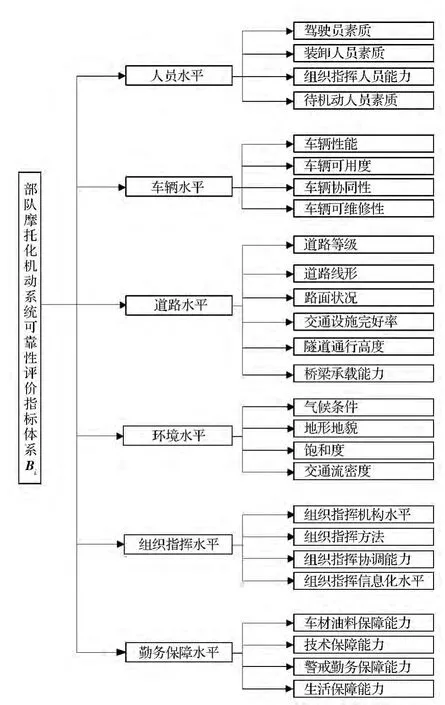
图1 摩托化机动系统可靠性评价指标体系
3.2 指标权重的确立
本文所建立指标体系中的大部分指标难以获取实测数据,因此需由专家打分来确定指标权重,鉴于各位专家的研究方向有所不同,其所打分数也存在一定的偏向,从而给权重的确定带来一定的模糊性。研究发现,专家人数越多,得到的权重越科学,与此同时权重的确定也就越模糊。在此基础上提出以下假设:即在专家人数不变的情况下,利用各位专家评分间的线性关系对实际评分专家数进行简化,从而实现权重评判的精确性。结合主成分分析的基本原理,现用主成分分析方法来确定权重。
(1)指标数据标准化。由于相关指标量纲不统一,需将原始数据进行标准化转换,使指标数据具有可比性。数据处理后,原X矩阵变成N×P的标准化矩阵X'。
(2)计算相关系数矩阵。在标准化矩阵X'中,计算每2 个指标变量间的相关系数,即可得出相关系数矩阵。若指标变量为p个,则得p×p的相关系数矩阵Rpp(Rpp为实对称矩阵):
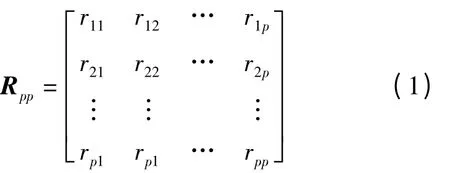
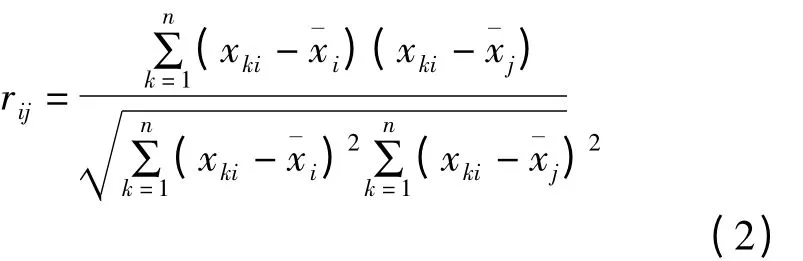
式中rij(i,j=1,2,…,p)为原变量xi与xj的相关系数,rij=rji,计算式为
(3)计算R矩阵的特征值与特征向量。采用雅可比(Jacobi)方法计算相关系数矩阵R的特征值与特征向量。

式中I为特征向量
解上式方程得p个特征值:λ1≥λ2≥…≥λp≥0。
求得对应的特征向量L为
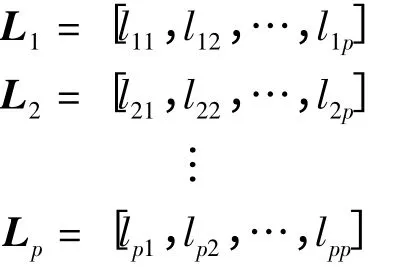
(4)计算特征值的贡献率与累计贡献率。利用特征值计算各指标的贡献率和累计贡献率,进而决定关键指标的个数。
贡献率计算公式为
累计贡献率计算公式为
一般情况下,取累计贡献率为85%~95%的特征值,λ1,λ2,…,λm分别对应于第1,2,…,m(m≤p)个主成分[5]。
(5)计算因素权重[6]。首先确定初级权重模型,即主成分模型

计算决策矩阵系数uij为

式中fij为初始因子载荷。
在此基础上构建综合评价函数:

式中k=λ1+λ2+… +λm。
结合原变量矩阵,可得原有指标得分综合值:

各指标权重为

3.3 模糊综合评价
(1)确定评价系统的因素集U。评价系统的因素集U是影响所研究的系统或对象的因素集,即系统的评价指标集合。

(2)确定评价指标的模糊权向量W。

(3)确定评语集V。

评语等级又称等级集合,每一个评语等级都对应一个模糊子集。通常,评语等级的级数m取值过大,则难以用语言描述且不容易判断等级的归属;m取值过小,则不能满足模糊综合评估的质量要求,因此,m取值应为[3,7]的奇数,这样便有一个中间等级,以更好的判断被评价对象的等级归属。具体评语等级可以依据评价内容用适当的语言加以描述,本文评价摩托化机动系统可靠性用V={高,较高,一般,较低,低}。
(4)确定模糊综合矩阵R。在等级模糊子集构造完毕的基础上,量化被评系统或对象的各因素(u1,u2,…,un),即从单因素的角度归纳各等级模糊子集的隶属程度,从而确定模糊关系矩阵:
式中,矩阵R中第i行j列的元素dij表示某个被评对象从因素ui来看对vi等级的隶属度。
计算隶属度rij的方法较多,常用的计算方法是专家评分法和隶属函数法。专家评分法是通过多名专家对各个指标进行评分,根据评分的结果确定隶属度rij;隶属函数法是通过采集被评对象的具体数据,分别对各指标构造评语等级的隶属函数,从而确定隶属度rij。
(5)利用合适的合成算子将W与各被评对象的矩阵R进行合成,从而得到被评价对象的模糊综合评价结果向量B。具体评价模型为
3.4 实例分析
本文选取某摩托化步兵师全员、全装备从北京驻地机动到A 训练基地的摩托化机动系统为例。该师每年定期到B 基地驻训2 次,因此有必要对该机动系统进行可靠性评价。
(1)指标权重的确定。由于无法采集各影响因素的具体数值,现选取20 位相关领域专家和经验丰富的部队摩托化机动指挥员对26 个因素进行打分,影响最强的给9 分,影响最弱的给1 分,其余根据影响强弱程度依次在1 ~9 之间取值(打分结果略)。
将每位专家作为指标,将各原始指标作为样本,用SPSS 软件对其进行主成分分析,得到6 个主成分。
由式(7)—(11)计算得原指标的权重为
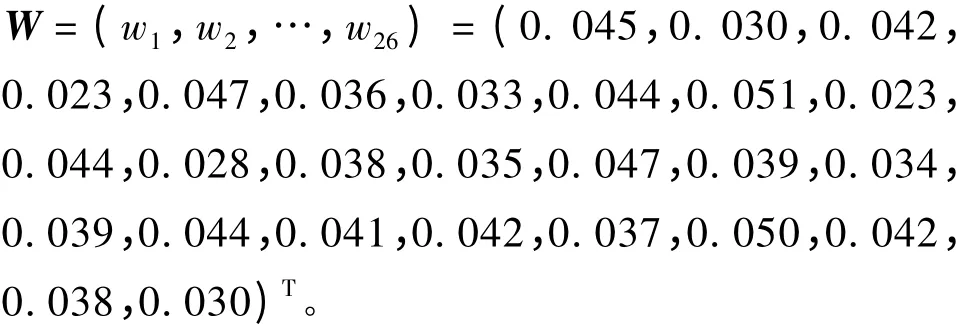
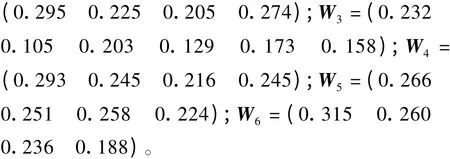
对上述结果一级指标下的二级指标进行归一化处理,得各二级指标相对于一级指标的权重为

(2)综合评价。本实例中,各指标的计算采用专家打分法,由20 名摩托化机动方面专家结合自身经验,在详细分析该摩托化机动系统情况的基础上,对该系统可靠性各指标隶属情况进行投票。将指标分为高(好)、较高(好)、一般、较低(差)、低(差)5 个等级,投票结果见表1。

表1 部队摩托化机动系统可靠性评价指标模糊评估
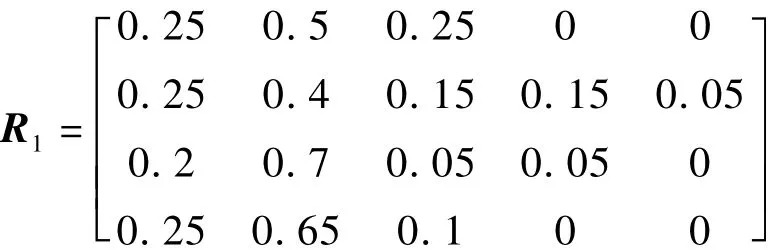
根据表1 得出各指标评价矩阵Ri。其中,人员水平指标评价矩阵:
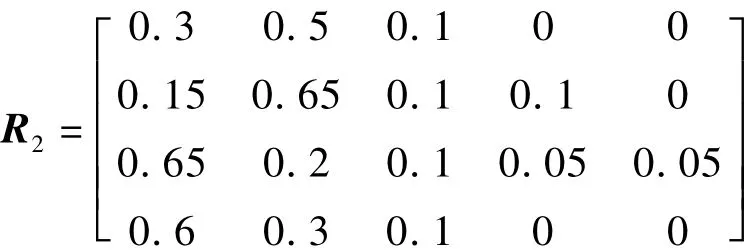
车辆水平指标评价矩阵:
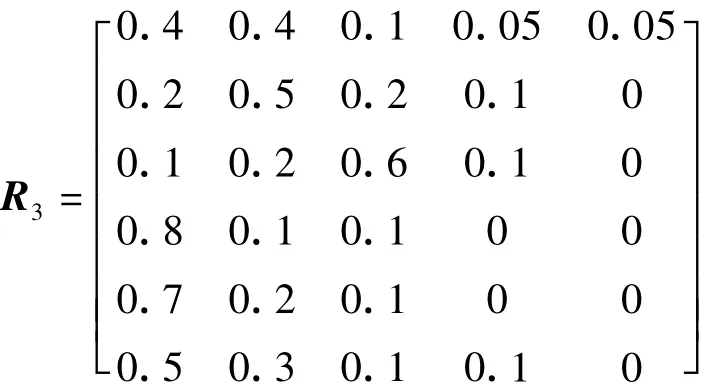
道路水平指标评价矩阵:
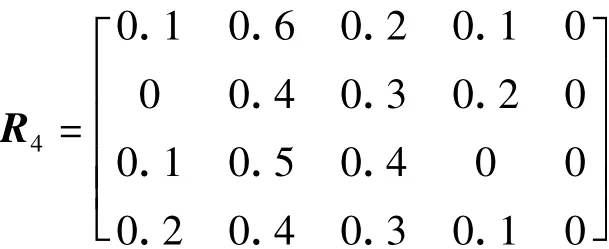
环境水平指标评价矩阵:
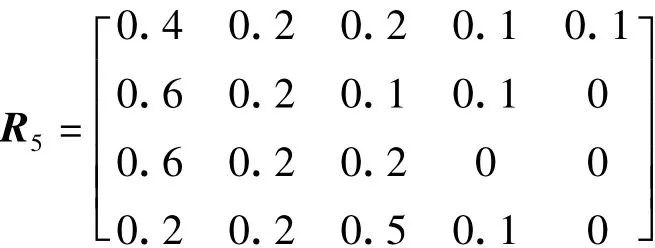
组织指挥水平指标评价矩阵:
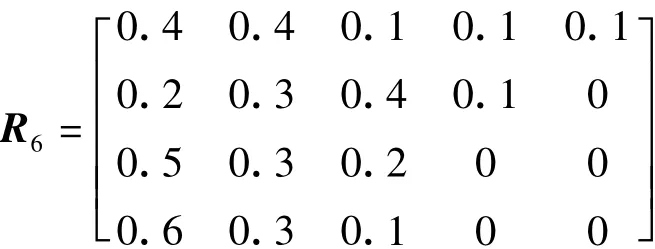
勤务保障水平指标评价矩阵:
由式(3)—(15)计算得人员水平指标的评价值B1= (0.235 0.563 0.144 0.047 0.011);车辆水平指标的评价值B2= (0.420 0.417 0.100 0.052 0.010);道路水平指标的评价值B3= (0.437 0.281 0.212 0.058 0.012);环境水平指标的评价值B4= (0.100 0.481 0.292 0.103 0.025);组织指挥水平指标的评价值B5=(0.457 0.200 0.242 0.074
0.027);勤务保障水平指标的评价值B6=(0.409 0.331 0.201 0.057 0.000)。
根据最大隶属度原理,可得人员水平、车辆水平、道路水平、环境水平、组织指挥水平、勤务保障水平等各指标的评价结果依次为{较高,高,高,较高,高,高}。
将U中的6 个因素子集Ui(i=1,2,…,6)看作U上的评价指标,由B1,B2,…,B6构成的单因素评价矩阵为

对一级指标进行打分,利用前述主成分分析法确定各一级指标权重为

因此,该摩托化机动系统可靠性评价结果为

由计算结果可知该摩托化机动系统可靠性综合评价结果为“较高”。
根据该师提供数据和资料可知,该师人员满编,训练有素,日常驾驶员训练扎实,军交指挥员全部为军交专业毕业或接受过专业培训的人员;车辆装备配发齐全,保养完好,专业维修队伍分工明确,配件齐全;A 到B 道路发达,技术等级高,设施设备完好;桥隧大部分满足国防要求,可通行重型装备;A 及B 地区气候良好,自然灾害少;道路线形较柔和,交通密度较低,饱和度较低;组织指挥的机构分工合理,职责明确,通信手段先进,组织效率高;各保障分队人员装备配备齐全,保障方案详细、完备,可较好地完成各项保障任务并有能力处理各突发事件。综上所述,该师摩托化机动系统可靠性评价结果为“较高”,符合实际情况。
[1] 刘冀和.扎实推进军事斗争后勤准备,不断提高部队摩托化机动后勤保障能力[J].军用汽车管理,2007(6):7-8.
[2] 刘澜,王琳,刘海旭. 交通运输系统分析[M]. 成都:西南交通大学出版社,2008:4-5.
[3] 张鸿彦.对部队摩托化机动交通保障有关问题的探讨[J].国防交通工程与技术,2008(4):12-15.
[4] 谭沧海,金秀满. 部队摩托化机动模拟系统[J]. 交通与计算,2002(1):27-30.
[5] 张晓东,谢先华,李正耀. 抽油机井泵效影响因素之主成分分析法[J].西南石油大学学报:自然科学版,2011(5):176-180.
[6] 韩小孩,张耀辉,孙福军. 基于主成分分析的指标权重确定方法[J].四川兵工学报,2012(10):124-125.
