CPT系统中的嵌入式控制系统体系构建
2014-12-24陈小娟
陈小娟
(重庆电子工程职业学院,中国 重庆400030)
0 引言
随着科学技术的不断发展,社会经济飞速前进,在社会、企业和家庭中电气化设备日益增多,成为现代化生产和生活工具的主流。 对于一些电气设备,传统供电方式限制了它们的普及和使用灵活性,同时给安全供电和环境安全问题带来了很大的影响。随着人们生活以及生产活动范围的扩大,人们迫切需要一种新型的电能传输技术来满足新型电气设备及各种特殊条件下的供电需求。 而CPT 系统采用基于电磁感应耦合原理的非接触式电能传输技术,克服了传统供电模式的种种不足[1]。
现今,人们对ARM(Advanced RISC Machines)已有深入了解,亦逐步认识到8 位MCU、32 位ARM、DSP(Digital Signal Processor)各自的优势所在。 在很多情况下,一个优秀的系统,既需要ARM 的超强事务管理功能,更需要DSP 的运算功能,两者缺一不可。 DSP 由于其特殊的结构、专门的硬件乘法器和特殊的指令,使其能快速地实现各种数字信号处理及满足各种高实时性要求。随着现代嵌入式系统的复杂度越来越高,操作系统已成为嵌入式系统不可缺少的部分。 而嵌入式系统的核心是嵌入式微处理器和嵌入式操作系统免费的嵌入式操作系统,如Linux,它是一个免费的、强大的、可信赖的、具有可伸缩性与扩充性的操作系统。Linux 实现了许多现代化操作系统的理论,并且支持完整的硬件驱动程序、网络通信协议与多处理器的架构,其源码的公开更有利于操作系统嵌入式应用[2]。
基于上述分析, 本文针对CPT 系统的性能要求提出了基于ARM和DSP 芯片的嵌入式系统,该系统充分利用了ARM 和DSP 的各自特点,使用ARM 和DSP 芯片进行协同开发。 操作系统则选用了源代码开放的Linux,以利于充分发挥系统的效能。
1 引入嵌入式技术的必要性
在CPT 系统中引入嵌入式技术的理由有以下两点:
(1)从目前的角度出发,首先,CPT 系统需要一个能够提供监视、控制、多进程、可实现实时或非实时的任务、可人工手动控制亦可自动运行等功能的智能控制系统;其次,嵌入式系统体积小、结构紧凑,可作为一个部件埋藏于所控制的装置中,它提供用户接口、管理有关信息的输入输出、监控设备工作,使设备及应用系统有较高智能和性价比;再者,目前微处理器可选用DSP、单片机和ARM 系列等,虽然目前国内工业控制场合中用的嵌入式工控设备大多采用的是以8 位单片机(MCS-51)为内核,有价格低廉、设计较容易、能达到一般要求的优点,但也存在着存储容量小、独立工作时功能较弱、较强功能要与PC机联机才能实现、实时性能不强、定位精度不高、人机交互复杂、操作不方便等缺点, 且CPT 系统要求的上述功能用单片机来实现是非常复杂的。 DSP 主要是用作大量的数据处理,在消费类产品中应用比较广泛;ARM 微处理器在工业控制、手持设备中的应用则比较多,更主要的是ARM 能够很容易地实现以上的功能。
(2)从未来的角度出发,首先,嵌入式系统是CPT 系统的部件,适用于对功能、体积、成本、可靠性、功耗有严格要求的CPT 系统或其它系统;其次,嵌入式控制系统还可应用于CPT 系统的故障诊断,且嵌入式系统接口的可扩展性和软硬件可裁减的灵活性也是一大优点,对将来系统的扩展或者裁减都十分方便。
2 系统整体设计及功能简介
2.1 整体设计
本嵌入式控制系统的硬件资源如下:3.5 寸的液晶显示屏能够提供实时的显示,用于显示相关参数的工作菜单、采集的波形等;可接入PS/2 标准键盘; RS232 串行口或USB 接口用于与CPT 系统和PC 机连接;16M 的flash 用于存储软件代码和保存系统设置参数;64M 的SDRAM 提供Linux 操作系统和控制软件运行所需的存储空间;JTAG接口用于调试; 另有五个面板按键用于手动控制CPT 系统。 在软件上,由于采用较高性能的处理器及相关外围硬件设备,系统数据通信协议更加可靠、合理、易于扩展;32 位的数据处理能力可以实现对采集到的参数的高速处理;数据采样频率为500ksps;友好的人机交互使得对CPT 系统的参数的监控极为方便。
本控制系统集成度更高、体积更小,既可作为嵌入式系统独立工作,也可作为从属功能设备由PC 机进行控制,以完成更复杂的工作。目前流行的嵌入式系统的设计模式是采用DSP+MCU 双处理器,以实现数据交换和协同工作。 这样,在满足处理大运算量实时任务要求的同时,极大地降低了系统的设计成本。 单片机用来分担部分实时性要求不高的系统任务,如系统配置管理、人机交互、通信等。但是,为了实现实时任务的调度, 软件上必须结合嵌入式实时多任务操作系统,才能真正实现实时控制[3]。
基于上述分析,我们选择以DSP+ARM 为双处理器,开发出CPT系统嵌入式控制系统体系构架。 系统总体框图如图1 所示。
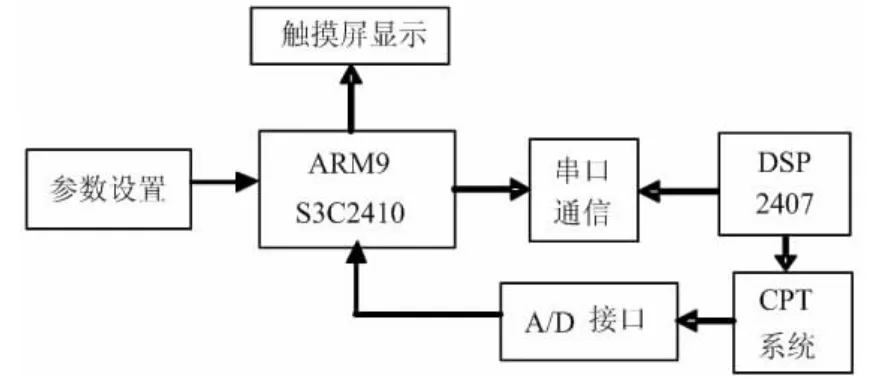
图1 总体硬件结构图
2.2 功能简介
在本系统中,ARM 作为主控制器负责整个系统的工作流程,任务调度,集中处理系统各部分中断,完成与外部系统的通信。DSP 处理器主要完成对电路参数信号的处理并作出决策输出何种波形。 ARM 主要用于决策,在本装置中采用ARM 构架的嵌入式芯片S3C2410。 DSP作为数据运算部分, 可以充分发挥其对数字信号处理的独特优势,本系统中采用的是TI 公司的RMS320LF2407 芯片,该系列的DSP 以其高性价比普遍应用于各类通信、便携式应用当中。
2.3 硬件架构设计
在本系统中ARM 属于决策层。 ARM 将CPT 系统的数据传送给DSP,并且将得到的数据以波形显示出来。 DSP 的主要作用是实现实时控制。 则对接收到的数据进行分析,校正后重新传送给CPT。 ARM部分主要由触摸屏、RS232 串口、USB 接口等与其他设备通信。该部分结构框图如图2 所示。

图2 系统结构示意图
3 控制系统的软件结构设计
如图3 所示,控制系统的软件结构可分为启动代码层、驱动程序层、操作系统层、系统组件层和应用程序(包括智能PID 控制算法模块、人机通信模块、A/D 采样模块、PWM 信号输出模块)五个层次。

图3 智能控制系统软件结构图
3.1 启动代码层
启动代码类似于PC 机中的BIOS, 位于系统上电后pc 指针的初始位置,是最先执行的程序。启动代码用于整个系统的初始化,使系统处于一种确定的状态,为加载操作系统以及应用程序做准备。
3.2 驱动程序层
设备驱动程序是操作系统内核与硬件设备连接的接口,驱动程序屏蔽了硬件的细节。 在应用程序中硬件设备都以文件的形式存放在/dev 目录下,称为设备文件。 这些硬件部件包括LCD 显示屏、A/D 转换器、键盘等,应用程序可以打开、关闭和读写这些设备文件,完成对设备的操作,就像操作普通的数据文件一样。 系统组件和设备驱动程序都是操作系统的一部分。
3.3 操作系统层
操作系统内核是整个软件系统的核心,负责整个系统程序的协调工作,如任务调度、进程间通信、中断处理、资源管理及分配等。在CPT控制系统的设计中,我们经过仔细的方案论证,选择了裁减改造以后的Linux 作为嵌入式操作系统,本文将在第3 章中详细论述改造的原理、方法和具体步骤。
3.4 系统组件层
该层软件主要是一些可选择安装的模块, 可根据不同的功能需要,操作系统可以添加不同的系统组件。 本文的CPT 控制系统中,主要选择了以下模块:
(1)文件系统。由于要显示读取控制信息,将文件系统从基本操作系统中分离出来,作为一个单独的模块,选择了支持FLASHROM 的文件系统。
(2)TCP/IP 模块。 TCP/IP 协议是计算机通信的工业标准,是访问Internet 的基础,采用该模块是为了方便主机与目标板的通信,并且为CPT 控制的网络化做准备。
(3)图形界面模块,主要提供给用户良好的人机接口界面,增强了系统的可读性和易操作性。本系统采用MiniGUI 提供图形用户界面的支持。
3.5 应用程序层
一个系统具有的多种功能,比如接收键盘输入、显示数据结果、接收采集数据等等。 类似这样的动作被称为事件,任何一个事件触发之后,都会有相应的任务来管理这些事件。 这些任务的集合便组成了用户的应用程序。 在CPT 控制系统中,开发了CPT 系统的键盘输入、数据采样、信息显示、算法分析、信号输出等应用程序。
3.6 主程序设计
主程序流程图如图4 所示。系统上电复位或按RESET 键复位,程序将从入口地址处开始执行,进行系统初始化。系统初始化结束后,开始执行主程序。
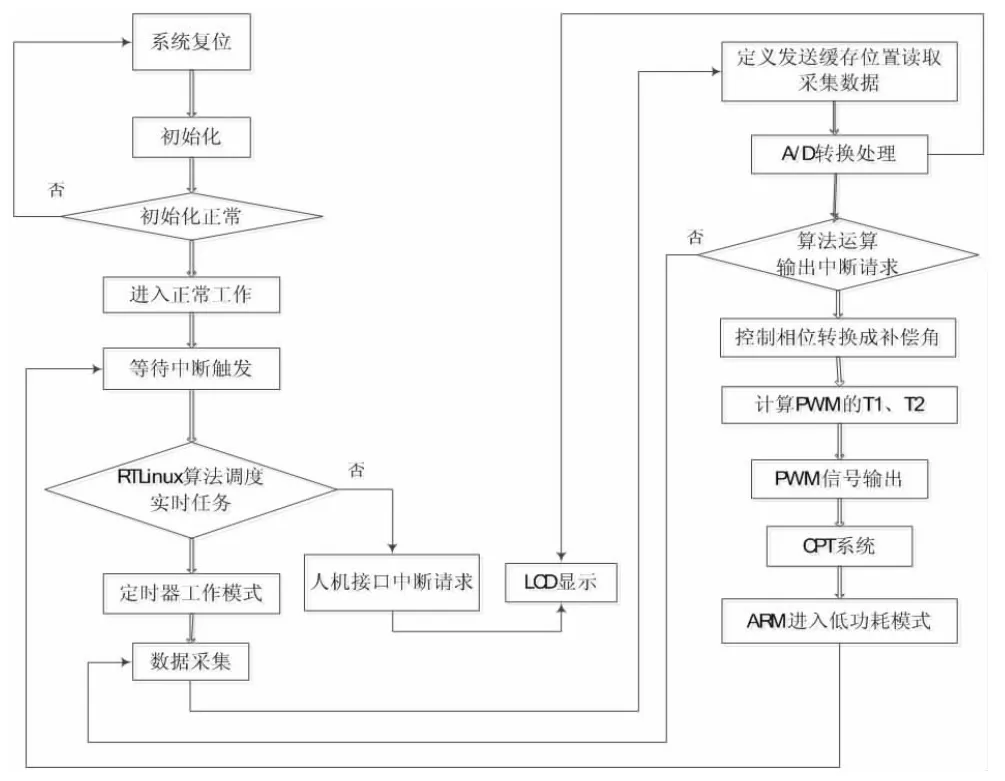
图4 系统总流程图
系统初始化主要包括提供启动代码,用以完成对CPU 的初始化、外部FLASH/SDRAM 的片选初始化、系统初始频率的初始化以及串口的初始化、时钟模式寄存器TCON 等的设置。待初始化正常后,等待中断请求,本系统把数据输出反馈、周期实时采集设为实时任务响应,把人机对话设为非实时任务中断,中断向量表存放于一个子文件中。 一旦有允许中断请求,CPU 被唤醒,进入活动模式,执行中断服务程序,执行完毕后,系统返回到中断前的状态,ARM 继续低功耗模式。
在整个过程中,需要完成的功能是:定时选通2 路A/D 转换器对流入初级回路谐振网络的电流和谐振网络两端电压信号进行采样、滤波;定时对处理好的采样值得到 和 过零点的相位差,进行算法分析处理,输出脉冲控制信号, 使 和 的相位差保持在一定范围内变化; 接受中断请求,处理键盘发送的数据,传送显示所需的数据。

图5 采用智能PID 时谐振电容电压波形局部放大
4 仿真结果
在常规PID 控制器参数确定之后,我们以此为依据进行智能PID控制器的设计,其具体控制参数根据经验调试而得到。此时,初级回路的谐振电容电压波形局部放大如图5 所示,此结果表明采用智能PID控制器比采用常规PID 时初级回路谐振电容两端的电压波形畸变程度小很多。
5 结论
随着嵌入式系统的飞速发展、社会对技术的要求越来越高,对非接触式电能传输技术的需求也日益增长,而嵌入式系统的加入使得本CPT 系统的性能和工作效率得到了大大的提高,这在实验仿真中已经验证。
[1]杜雪飞,孙跃.混合电动车及其电气驱动系统[J].重庆大学学报:自然科学版,2002,09:59-64.
[2]刘斌,李仲阳,ARM/DSP 双核系统的通信接口设计[J].单片机与嵌入式系统应用,2005,05:22-24.
[3]高佳,王爱民,于海.新型嵌入式电能质量监测装置的设计[J].现代电子技术,2005,16(207):26-28.
[4]方琳琳.基于嵌入式技术的CPT 系统的控制算法的研究与实现[D].重庆大学,2007.04:20-22.
