雷达引导进场路径规划模型
2014-12-23康瑞,杨凯
康 瑞,杨 凯
(1.中国民用航空飞行学院 空中交通管理学院,四川 广汉618307;2.四川大学 计算机学院 图形图象研究所,四川 成都610064)
0 引 言
在繁忙机场终端区,进近管制员通话量大。当飞行流量较大或跑道容量突然减少时,人工计算的效率不高,空中等待时间延长,安全性大大降低。为此,国内外学者对航空器进场优化进行了许多研究工作[1-15],研究方向多为降落排序及降落时隙分配,引导航空器以何种路径飞行能使其按照一定次序安全降落于机场跑道,在以往的研究中并未涉及。基于以上分析,本文提出了雷达引导进场路径规划模型。模型尽量贴近管制业务,考虑到民用机场进出港航空器机型相对固定,进近性能、尾流等级差异小等因素,利用计算机辅助设计,基于历史飞行轨迹对雷达引导进场、进近路径进行规划。雷达管制员可利用规划的路径指挥航空器降落,将机动飞行位置和时间控制在一定范围内,从而为雷达引导管制业务提供辅助决策。
1 问题描述
根据 《中国民用航空空中交通管理规则》 (CCAR-93TM)规定,在雷达引导终止时,应当通知航空器其所在的位置,指示其恢复自主领航,为了使雷达引导结束后,航空器位置、速度、高度与公布的标准程序差异不大,航空器驾驶员能继续按照程序飞行,且符合现有管制规则和习惯,因此采用标准进场程序、进近程序和历史飞行轨迹为依据,构造数学模型生成雷达引导路径。
设P = {P1,P2,……,Pn}为雷达引导的进场航空器轨迹点集合。Pi= {pi,1,pi,2,……,pi,n}表示航空器i的轨迹点。每个轨迹点pi,j={lo,la,t,h}包含经度、纬度、高度、时间。S = {s1,s2,……,sm}为标准进场、进近程序中的固定点、导航台、拐点集合。sj={lo,la,F′,F″}包含经度、纬度、实际经过该点的航空器集合、计划经过该点的航空器集合。LS= {ls1,ls2,……,lsn}为雷达引导路径集合。lsi={ps,pe,Δt,Δh,Δd,a},包括起点、终点位置、平均飞行时间、平均高度差、应飞磁航向。本文模型基于进场航空器在雷达引导下飞行的轨迹点集合P、标准进场程序、进近程序中固定点、导航台、拐点集合S,采用一系列数据分析和拟合方法,生成雷达引导路径集合LS。本文模型由历史数据分析、雷达引导路径生成两个子算法构成。
2 模型设计
2.1 历史数据分析子算法
将集合S 与P 中各元素进行对比分析,对雷达引导下航空器经过较多的拐点进行线性拟合,确定反映进场、进近程序和雷达引导飞行轨迹共同特征的位置点,命名为关键点,关键点集合用S’表示。
设dis(x,y)为计算x,y之间距离的函数,di,j为航空器i的轨迹点与点sj的最小距离,单位km。则有

若di,j<4km,认为航空器fi飞行时经过了点sj,令

设n(sj.F′)为计算集合sj.F′元素个数的函数,定义点sj使用比例

意义为在实际飞行经过点sj的航空器占飞行计划中经过的航空器架次比例。
利用实际轨迹点pi,m修正sj经纬度
若δj>0.5,令

当点sj利用率大于门限值0.5,可加入关键点集合S′。
2.2 雷达引导路径生成子算法
遍历航空器飞行轨迹P 和关键点集合S’,判断S’各元素是否存在通路,生成雷达引导路径集合LS,并计算得到各航段的平均飞行时间、平均高度差、平均距离等参数。
遍历S’中任意2 个元素,是否存在航班fi,满足fi∈(s′k.F′∩s′j.F′),s′k.F′为经过关键点sk的航班集合,若有,则令Fj,k=Fj,k∪{fi}。
若Fj,k=,认为s′j,s′k不连通。
反之,认为s′j,s′k连通。计算路径的各项参数。
若pi,n1.t<pi,n2.t则:lsi.ps=sj,lsi.pe=sk。反之,lsi.ps=sk,lsi.pe=sj

连通判断还应该满足以下约束条件:①路径利用率不小于门限值;②路径不会穿越跑道及跑道延长线;③不产生回路;④至少有一条路径连接终点。
3 仿真实验与结果分析
本文在CPU 为2.40GHz,内存为2GB的计算机及WIN7的环境下采用VC6.0编程实现上述模型,对本文模型的可行性和优化型进行验证。
图1是成都双流机场的进近空域平面图,图中虚线为空域水平边界,黑色线段为20右、02左跑道标准进场程序飞行路径。表1给出成都双流机场20号右跑道独立运行标准进场、进近程序的路径固定点信息。

图1 双流机进近空域

表1 标准进场、进近程序中的固定点
下面以成都双流机场为例,利用公布的20号右跑道独立运行标准进场程序、仪表进近程序、雷达引导历史轨迹对本文提出的进近路径规划模型进行仿真验证,并给出数据分析。
3.1 标准进场路径与历史轨迹对比
图2给出2010年11月17日14:00:00-16:59:59,使用20右跑道46 架次进场航空器的雷达引导历史轨迹,图中点迹为历史轨迹,黑色线段为标准程序中的飞行路径。

图2 20右跑道降落航空器轨迹与标准进场程序
由图2可知飞行轨迹较为分散,航空器机动飞行路线复杂,与标准进场程序 (黑色实线)差异很大,历史航迹与WFX、CZH、BHS 重合度较高,而与TR0,TR1,N1重合度较低。
图3为根据图3数据计算得到的标准进场、进近程序固定点、拐点利用率。由图3可知,点的位置距离跑道越近,利用率越低。根据飞行计划,24架航空器会经过BHS点,但在雷达引导中经过BHS 仅为15 架次,利用率为0.625,而接近跑道的N1、TR0、TR1这3个拐点,利用率为0,说明在雷达引导时并未使航空器经过该点,这个结果与图2一致。其中,点 APP0,APP1,APP2,APP3,APP4,WFX,JTG,BHS,CZH,RUNWAY 满足利用率大于0.5。这些点将加入关键点集合,而N1,TR0,TR1这3个拐点由于利用率低将通过历史轨迹线性处理进行重新拟合。

图3 固定点、拐点利用率
3.2 历史轨迹拟合生成关键点集合
采用2010 年11 月17 日8:00:00 开始至18 日1:59:59,共18小时的进场航空器雷达引导飞行轨迹,当日成都进近实施雷达管制,进出港航班共531 架次,进场航班281架次,雷达引导进场轨迹点256357个。
表2给出利用2.1节算法拟合后得到关键点集合,对比表1与表2可知,20右跑道进场、进近关键点个数仍为14个,App2位置偏移了近19km,TR0,TR1,N1,RWY拟合后与原位置差异很大。拟合后各关键点利用率均大于0.5,说明通过拟合生成的关键点能反应大部分降落航班的进场、进近路径特征。

表2 关键点
其中,由于点RWY 处于跑道延长线上,CTU 为路径终点,两点的利用率最高,均大于0.9。而在跑道东面的导航台、拟合关键点的利用率略小,当空域内飞行流量较大时,雷达引导航空器机动飞行频率较高,管制员引导航空器沿着不同的机动路径飞行以达到调整前后机间隔的目的,飞行位置偏移较大,因此这些关键点利用率较小。
3.3 雷达引导路径生成
利用上节算例3.2中的雷达引导历史轨迹和表2关键点集合生成引导路径集合,见表3。

表3 20右跑道引导路径
表3中的平均飞行时间、平均飞行距离、平均下降高度是根据实际飞机轨迹统计得到。在不同的情况下,航空器到达关键点的高度、速度不同,但由于进近空域内航空器机型相对固定,进近性能差异不大,因此利用标准进场、进近程序和历史数据拟合生成的;雷达引导路径能反映常见民用运输机型进场、进近飞行轨迹的一般特征。
由表3可知,五边的切入点RWY 距离CTU 台16.78 km,距离最后进近定位点大于4km;从TR1和TR0两点切入最后进近航段,高度差小于50m,且距离大于4km。以上均满足 《中国民用航空空中交通管理规则 (CCAR-93TM)》中规定的雷达引导规则:引导航空器切入最后进近时,应当确保切入点距外指点标或最后进近定位点不少于4km;引导应当在切入航向道前,使已建立航向道的航空器有至少4km 的平飞。由此说明本文算法拟合出的关键点和路径符合实际飞行原则和管制规则。用18小时281架次的降落航班进行数据统计。与表3对比,本文模型拟合生成的引导路径的平均飞行时间与距离与历史统计数据符合得较好,能体现出进港航班的一般轨迹特性,符合现有的管制员雷达引导习惯。
图4以三维方式给出成都进近范围内的空域结构、20右跑道、02左跑道,实施雷达管制,雷达引导路径信息,关键点位置、高度。如图4所示,成都双流机场进近管制区是为以边界形成的多边形为底,一定高度范围的立体空域结构。入界点位于空域边界线上,关键点距离最终降落点越近,高度越低。关键点之间的黑色线段为拟合得出的雷达引导路径。

图4 雷达引导路径
3.4 雷达引导优化分析
为进一步分析本文模型规划的进场、进近路径对管制过程的优化作用,表4给出46架航空器的评价指标数据。

表4 历史数据与仿真数据对比
根据表4可知,利用本文模型规划的路径进行雷达引导,平均飞行时间减少9.1%,飞行距离减少8.52%,降落总用时间减少19.83%,不会出现航空器盘旋等待。此外,飞行拐点减少24.93%,这表示能同时减少航空器驾驶员操作和管制员通话量。根据统计可知,管制员发布一条航向指令并判断驾驶员复述是否正确平均用时10s,减少102个拐点意味着减少1020s通话时间,由此说明本文模型规划的雷达引导路径能有效减少空中延误和减轻飞行员、管制员工作负荷。由于篇幅限制,表5给出16:00-17:00的15架连续降落的航空器对比数据。
由表5可知,在不改变降落次序的情况下,仿真过程用44min22s完成降落过程,比历史数据减少了17min34 s。由于在成都双流机场降落的航班95%以上为尾流M、进近类型C、D 类的常用运输机型,最小安全间隔应差异不大。历史数据中,航空器与前机最小飞行间隔均值为226 s,方差为89.1s,仿真的最小飞行间隔均值为151s,方差仅为29.6s。由此说明,利用本文模型规划路径进行雷达引导,在确保安全的同时能有效控制飞行间隔,增加跑道的使用效率。
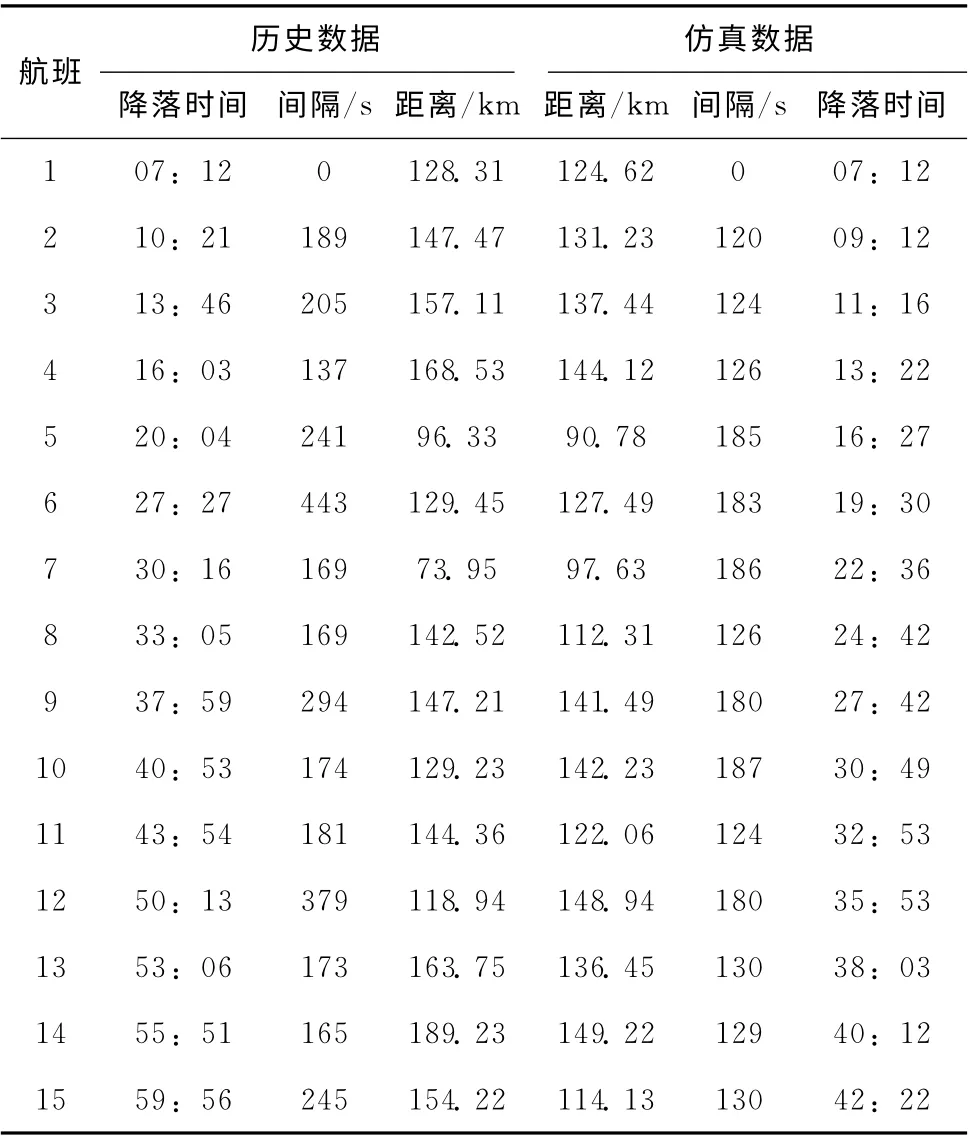
表5 细节数据对比
4 结束语
本文在计算机辅助设计的条件下,建立数学模型对雷达引导进场、进近路径进行规划,规划结果不但包括引导航空器从进场、起始进近点到达跑道延长线的飞行路径。在雷达引导过程中,管制员可在可控的时间、空间范围内调整降落流量。本文模型规划的雷达引导进场、进近路径满足管制规则,符合一线管制员操作习惯,能有效增加跑道利用率,减少空中延误和管制员工作负荷。本文研究成果能以辅助决策方式协助一线管制员实施雷达引导,可用于雷达引导标准化体系及指标建立,具有广泛的应用前景。
[1]KANG Rui,PENG Lijuan,YANG Kai.Random groundholding model based on grouped scheduling [J].Journal of Sichuan University:Engineering Science Edition,2009,41(6):147-152 (in Chinese). [康瑞,彭莉娟,杨凯.基于分组排序的随机性地面等待模型 [J].四川大学学报 (工程科学版),2009,41 (6):147-152.]
[2]YANG Kai,ZHANG Jianwei.Research of arriving aircrafts scheduling model based on push-back and swap [J].Journal of Sichuan University:Engineering Science Edition,2010,42(6):138-144 (in Chinese)[杨凯,张建伟.基于回溯与交换的降落航班排序模型的设计与实现 [J].四川大学学报:工程科学版,2010,42 (6):138-144.]
[3]HU Jun,WANG Minghui,YOU Lei.Research on the anti-blockage capability in air transportation network [J].Journal of Sichuan University:Engineering Science Edition,2011,43(Z1):112-115 (in Chinese).[胡俊,王明辉,游磊.空中交通网络缓堵能力的研究 [J].四川大学学报:工程科学版,2011,43 (Z1):112-115.]
[4]TIAN Yong,SUN Jia,WAN Lili,et al.Speration determing method of closely spaced parallel runways [J].Journal of Traffic and Transportation Engineering,2013,13 (1):70-76(in Chinese).[田勇,孙佳,万莉莉,等.近距平行跑道间隔确定方法 [J].交通运输工程学报,2013,13 (1):70-76.]
[5]XU Xiaohao,ZHAO Hongsheng,WANG Zhenyu.Overview of wake vortex separation reduction system [J].Acta Aeronautica et Astronautics Sinica,2010,31 (4):654-662 (in Chinese).[徐肖豪,赵鸿盛,王振宇.尾流间隔缩减技术综述 [J].航空学报,2010,31 (4):654-662.]
[6]ZHANG Jiajing,ZHANG Jianwei,Arriving and leaving aircrafts scheduling model based on dynamic optimize [J].Journal of Sichuan University:Natural Science Edition,2012,49(1):90-96 (in Chinese).[张家静,张建伟.基于动态优化的进出港航班排序模型 [J].四川大学学报:自然科学版,2012,49 (1):90-96.]
[7]LI Songna,ZHOU Jie.Probability update strategies for capacity scenarios in the multi-airport dynamic ground-holding problem[J].Journal of Sichuan University:Natural Science Edition,2013,50 (5):923-926 (in Chinese).[李松娜,周杰.多机场动态地面等待问题中起降能力的概率更新策略[J].四川大学学报:自然科学版,2013,50 (5):923-926.]
[8]CHEN Cheng,ZHU Min.The design and implementation of simulating and testing system for RDP [J].Journal of Sichuan University:Natural Science Edition,2008,45 (5):1067-1071 (in Chinese). [陈铖,朱敏.RDP 仿真测试系统的设计与实现[J].四川大学学报:自然科学版,2008,45 (5):1067-1071.]
[9]KANG Rui,YANG Hongyu,YU Jing,et al.The analysis of ground-delay policy mathematical model[J].Journal of Sichuan University:Natural Science Edition,2007,44(1):61-64(in Chinese).[康瑞,杨红雨,余静,等.地面等待策略数学模型分析[J].四川大学学报:自然科学版,2007,44(1):61-64.]
[10]YU Jing,LIU Hong,XIONG Yunyu,et al.An improved evaluation model of En route dynamic capacity [J].Journal of Sichuan University:Natural Science Edition,2007,44 (5):1005-1008 (in Chinese).[余静,刘洪,熊运余,等.一种改进的航路动态容量计算模型 [J].四川大学学报:自然科学版,2007,44 (5):1005-1008.]
[11]WEI Jie,HONG Mei,YANG Jia.Research and application on UML-based integration testing of component based software[J].Journal of Sichuan University:Natural Science Edition,2007,44 (4):791-794 (in Chinese). [魏洁,洪玫,杨嘉.基于UML 模型的组件集成测试方法 [J].四川大学学报:自然科学版,2007,44 (4):791-794.]