基于影响网的战场威胁强度评估建模
2014-12-23姚佩阳稅冬东陈洁钰
王 勃,姚佩阳,稅冬东,陈洁钰
(空军工程大学 信息与导航学院,陕西 西安710077)
0 引 言
对战场威胁区域的威胁强度评估是UAV 航迹规划[1]的一个重要环节,航迹规划中实时、准确的威胁强度评估,可以引导UAV 在执行任务过程中有效的躲避威胁、障碍,最终以最小代价到达任务区域并完成任务。为了适应信息化条件下的作战需求,以及动态环境中规划实时性的要求,对复杂战场环境和敌我双方态势分析建模的实用性、时效性提出了越来越高的要求。对战场空间威胁建模,通常是按照一定规则将空、地域分解为多个威胁区,根据模拟战场环境分析各威胁区之间关系,对每个区域的威胁强度进行估计,从而降低问题的复杂度,以实现航迹威胁强度评估。当前对战场威胁估计建模采用的方法包括多属性决策[2]、神经网络技术[3]、模糊技术[4]、态势推演[5]等。
在不确定战场环境中进行威胁强度估计时,要对各威胁区域与航迹威胁强度之间因果影响关系进行建模,贝叶斯网络[6,7](Bayesian networks,BNs)是处理此类问题的常用方法,BNs不仅能满足对不确定事件的建模要求,而且能够很好地描述事件-效果之间的因果关系[8]。但BNs在应用时需要定义节点间条件概率,这些概率参数有时难以获得,并且需要专家指定,往往主观性较强。在未来战争中,敌方会针对我方进攻或防守形式实施各种有效措施,例如电子压制、拦截等,即便是我方拥有先进的侦查技术也很难将战时的各种态势分析全面,与此同时,天气等自然条件的变化也是不可掌控的因素。利用BNs处理多变的战场环境问题时,计算的复杂度会随着输入因素的增加成指数倍增长。为解决BNs面临的上述问题,乔治梅森大学的研究团队在贝叶斯网络的基础上,结合因果强度逻辑(causal strength logic,CAST)参数,提出了一种不确定推理建模机制——影响网[9](influence nets,INs)。本文利用INs处理战场威胁强度问题,分析战场环境威胁因素,构建各威胁因素与战场威胁强度的关系模型,评定各航迹的威胁情况,利用案例仿真分析验证所提方法的有效性。
1 影响网模型
1.1 影响网的概念
INs是为了解决贝叶斯网络在描述任务关系过程中需要大量的先验信息和复杂概率推演过程这些难题而提出的。INs将任务过程描述成一种有向无环的拓扑结构,用图形与箭头直观的表示出任务内部各要素之间的联系[10]。将只有输出的要素表示为根节点,也称可控事件;只有输入的节点称为叶节点;既有输出也有输入的称为中间节点,也称为中间事件。由于贝叶斯网络在解决复杂问题时,输出参数随着输入参数个数呈指数倍增加,这使得问题的求解效率下降。为此K.C.Chang改进了一种CAST 参数逻辑方法,自定义一组参数来削弱这种限制。这种逻辑方法只需要为每组节点定义一组有价值的参数(hi,gi),如图1 所示,利用此参数确定两事件之间的影响关系,h表示A 事件发生对B 事件发生的影响;g表示A 事件不发生 ()对B事件发生的影响,h与g的取值范围为 [-1.0,1.0],其中用数值的正负分别表示两者促进与抑制关系,用数值的大小表示两者关系的强度, “0”代表没有影响。同时,需要对所有的根节点指定先验概率g (Ai),非根节点指定基准概率g (Bi)、g (C)[11]。
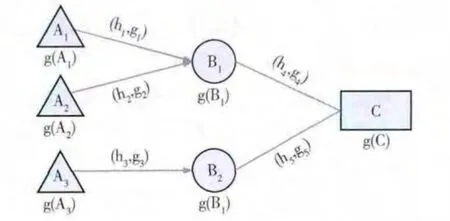
图1 影响网
在利用INs确定根节点对子节点的影响强度集合时,需要综合考虑影响参数(hi,gi),以图1中A1、A2、B1为例:当A1、A2都发生时,即P(B1|A1,A2),此时的影响集合为 {h1,h2};当A1发生、A2不发生时,即P(B1|A1,),此时的影响集合为 {h1,g2}。
对于影响值(hi,gi):若hi>0,gi!0,表示事件A 的发生对事件B的发生有促进作用;若hi!0,gi>0,表示事件A 的发生对事件B 的发生有抑制作用;对于临界点0、1,-1,以hi为例,具有以下关系
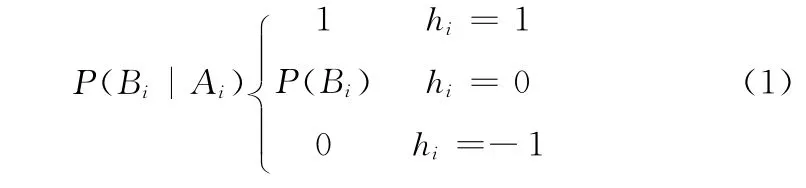
式中:P(Bi|Ai)——事件Bi在根节点Ai影响下的发生概率,P(Bi)——事件Bi不受任何影响时的发生概率。
将横轴hi取值范围在[-1,1],纵轴P(Bi|Ai)取值范围在[0,1],利用线性差值法,可得到条件概率P(Bi|Ai)与逻辑参数hi和事件Bi的非条件概率P(Bi)之间关系为

影响网形式上可以表示为INs =〈V,E,C,B〉,其中G =〈V,E〉代表满足马尔科夫条件的一个有向无环图,其中:V表示INs中节点集,即影响因素;E表示INs中边的集合,代表节点间的因果影响;C表示INs中节点之间影响值集;B表示根节点的先验概率与非根节点的基准概率。
1.2 影响网问题分析
利用影响网对问题进行分析,即是利用数组INs =〈V,E,C,B〉对问题进行求解的过程,首先是要对数组INs=〈V,E,C,B〉中的各个要素进行计算和设置:
明确节点集即影响因素V ;确立各影响因素之间的因果关系集E;计算每个影响因素的影响值集C;确定根节点的先验概率与非根节点的基准概率。
在对数组INs=〈V,E,C,B〉中的各要素分析后,利用影响值确定聚合正、负影响值和整体影响值并计算出子节点条件概率;最后计算出子节点的发生概率。
具体节点相关概率计算步骤如下:
步骤1 对问题进行分析,将问题中各要素归类分层,按层级关系确立节点集合V ;
步骤2 确立层内各元素之间、层与层之间的因果关系E;
步骤3 利用CAST 逻辑方法确定每组元素之间的影响值集C,即确定(hi,gi)的值;
步骤4 在专家经验和数据分析的基础上,确定根节点的先验概率与非根节点的基准概率;
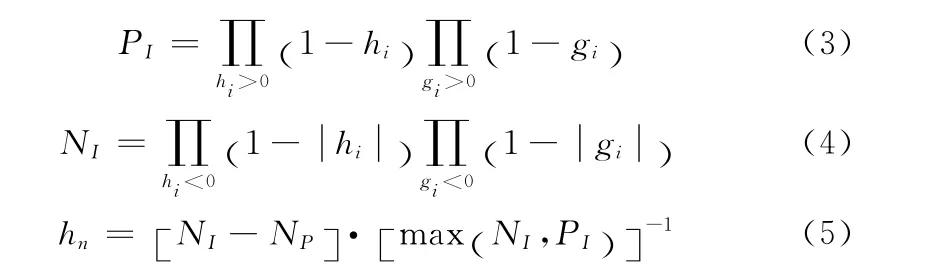
步骤5 利用影响值(hi,gi),计算出聚合正影响强度值PI、聚合负影响强度值NI与整体影响值hn
步骤6 计算子节点条件概率P(Bi|Ai)

式中:P(Bi)——目标子节点B 的基准概率。
步骤7 利用子节点Bi的条件概率P(Bi|Ai)和根节点的先验概率P(Ai),根据全概公式和根节点发生概率相互独立假设,可得

2 基于INs的战场空间威胁建模
UAV 航迹规划是以各类约束为条件,规划出满足任务需求的飞行轨迹的过程,是UAV 任务规划的关键技术之一。随着UAV 作战任务的多样化,规划形式正在从单机预先规划向多编队协同动态规划方向发展,内容呈现多元化、复杂化趋势。这就要求在面对不确定战场地形环境、天气因素、武器装备等威胁时,高效准确的计算出最佳航迹。为了解决传统规划方法较繁琐、计算复杂等问题,利用INs进行战场空间建模,能够直观描述各因素之间关系,有效提高航迹规划效率。
2.1 战场威胁建模描述
战场威胁模型用以定量描述UAV 飞行空间中各威胁因素与航迹威胁强度之间的关系,威胁因素主要分为固有威胁和突发威胁2大类,其中涉及天气、地形、雷达、火炮、导弹等。利用对各航迹威胁强度的分析结果直观地反映航迹的优劣,以便进行航迹选择。
现代战争是以体系对抗为主,UAV 在飞行途中面对的不再只是单一的防御手段,而是有一定数量、有相应组织的预警雷达、防空导弹、密集阵地火炮等多层次的防空手段。在有效规避雷达、火力威胁的同时,地形与气象威胁也是要考虑的因素,如图2 所示。面对错综复杂的情况,UAV 的航迹威胁不能是简单的线性叠加,而是需要科学合理地描述出各个威胁源对于UAV 的影响,才能确保航迹规划的实用性。此外,突发威胁 (比如预警机盘旋侦察、天气突变等)的出现也会使问题更加的复杂,在规划过程中存在大量的不确定因素,为了很好的解决此类问题,下面利用INs对问题进行解决。
图2 威胁区
2.2 INs威胁建模及求解过程
基于INs威胁建模首先是要明确建模对象,在充分分析战场情况后,定义INs数组INs=〈V,E,C,B〉。
(1)确定影响因素V:综合考虑战场威胁环境因素,将威胁定义为固定威胁与突发威胁2类,其中主要考虑4类威胁,分别为气象威胁、地形威胁、雷达威胁、火力威胁。
1)气象威胁Vw:气象威胁主要从气象种类、毁伤强度、作用范围、持续时间、出现频率、稳定程度等来对不同天气情况进行分类,主要包括:风暴、雷电、冰雹、雨雪、强对流、云层、雾霾、沙尘、温度等。根据每种天气的威胁强度,将气象威胁等级分为高中低3级,高级即为灾难性影响天气,主要包括风暴、雷电、冰雹等;中级即为严重性影响天气,主要包括雨雪、强对流层等;低级即轻微性影响天气,主要包括云层、雾霾、沙尘、温度等。
2)地形威胁Vg:UAV 飞行中经常采用低空飞行,利用地形优势来规避雷达探测和火力打击。地形威胁可分为禁飞区与可飞区2种,禁飞区指不可飞越地形,包括山峰等;可飞区指可穿越地形,包括峡谷、盆地、丘陵、丛林等,禁飞区对UAV 的威胁是致命的。这里只考虑可飞区,将可飞区威胁分为高低2 级,高级即为高概率撞毁地形,主要包括峡谷、丛林等;低级即为低概率撞毁地形,主要包括盆地、丘陵等。
3)雷达威胁Vr:雷达作为现代防空体统中的关键部分,是进行目标探测、跟踪、精确武器指导的灵魂,雷达利用UAV 的RCS(雷达散射截面)反射波变化来探测目标位置。雷达作用范围较大,但相比其它威胁其威胁度较低。
4)火力威胁Vf:火力威胁主要包括防空导弹和密集火炮阵地:防空导弹主要用于摧毁中远距离目标及高空目标;密集火炮阵地主要用于摧毁近距离和低空目标。在雷达探测并锁定目标之后,一旦进入有效的火力射程范围,目标将会以一定概率被击毁,这种毁伤一般是毁灭性的。在各种防空手段中,火力威胁一般处于最后阶段。
本文中固定威胁主要考虑气象、地形、雷达、火力威胁;突发威胁主要考虑雷达、火力威胁。
(2)确定影响因素关系E:将INs分为4层:效果层、中间层、影响层、基础层。
1)效果层表示总威胁度Vt;
2)中间层表示2类威胁,包括固定威胁Vi和突发威胁Ve;
3)影响层表示威胁直接要素,主要考虑气象威胁Vw、地形威胁Vg、雷达威胁Vr、火力威胁Vf这4种因素;
4)基础层表示威胁的根本因素,气象威胁下的基础层定义为高中低3级,分别为Vw1,Vw2,Vw3;地形威胁下的基础层定义为高概率损毁与低概率损毁2 级,分别为Vg1,Vg2;雷达威胁下的基础层定义一种探测雷达Vr1;火力威胁下的基础层定义为防空导弹与密集火炮,分别为Vf1,Vf2。
INs的4个层次之间、各层元素之间具有很强的因果关系,可以将不同的因果关系按层级分为〈Efirst,Esecond,Ethird〉3种:
Efirst表示效果层与中间层的因果关系。{Vi,Ve}∈Vt。
Esecond表示影响层与中间层的因果关系,包括{Vw,Vg,Vr,Vf}∈i{Vi,Ve}。
Ethird表示基础层与影响层的因果关系,其中包含{Vw1,Vw2,Vw3}∈Vw, {Vg1,Vg2}∈Vg,Vr1∈Vr,{Vf1,Vf2}∈Vf。
(3)确定影响值集C:利用CAST 逻辑方法,根据每种因素在对UAV 正常飞行中影响程度的大小,确定每组元素的影响值(hi,gi)的值。本文只对促进事件发生的影响值进行分析,为方便分析,将gi值设为0,hi值根据影响强弱进行设定。
(4)确定影响概率B:在专家经验和数据分析的基础上,确定根节点的先验概率与非根节点的基准概率,先验概率表示的是根节点在任务初始阶段发生的概率,基准概率表示的是子节点在任务初始阶段达成效果的概率。在威胁空间建模问题中,根据各种威胁在任务初始阶段的发生为等可能事件,不随着其它事件的出现变化,因此将基础层中节点的先验概率设为0.5,即为每种威胁出现与不出现的概率相等;根据各种专家经验和数据分析结果对各子节点在任务初始阶段达成的效果概率进行分析,拟定影响层中节点的基准概率为0.3,中间层节点的基准概率为0.4,效果层中节点的基准概率为0.3。
(5)确定正负影响强度与整体影响值:将影响值(hi,gi)代入式 (3)~式 (5),计算出聚合正影响强度值PI、聚合负影响强度值NI与整体影响值hn。
(6)确定条件概率:利用式 (6)确定各个子节点的条件概率P(Vi|Vj)。
(7)确定效果层元素发生概率:利用式 (7)计算得出效果层VT的发生概率,即威胁概率。
综合上述过程,可以得到INs模型,如图3所示。

图3 INs模型
3 案例仿真分析
在一场战役中,UAV 编队要执行一次紧急远程目标侦察任务,为了保证任务完成时间,要对敌方威胁区进行突防。突防时所遇威胁可能是预先规划方案中的单一威胁或多重威胁,也可能是各种突发威胁。以下假设2种威胁区域,分别对这2种威胁区域进行分析计算:(设A、B、C、D 分别代表天气威胁、地形威胁、雷达威胁、火力威胁)
假设局部威胁环境如图4所示:在区域一中,A1区与B1、C1、D1这3 种威胁区重合,C1区与D1区重合,其中A1、B1、C、D1分别代表雨雪、盆地、预警雷达、防空导弹威胁;在区域二中,A2区与B2、C、D2这3种威胁区重合,B2、D2区分别与C区重合,其中A2、B2、C、D2分别代表沙尘、峡谷、雷达、火炮威胁。此处威胁区既可以指代固定威胁也可指代突发威胁。
图4 局部威胁环境
对于各个威胁区属性的假设见表1。
表1 威胁区参数
以下利用2.2节中所提到的INs求解步骤对各种可能遇到的威胁组合进行威胁概率计算,得到威胁概率值见表2。

表2 各组合威胁概率值
表2中数据表明,UAV 在穿越威胁区时,对于不同天气、地形、雷达、火力威胁区组合,威胁的概率值有明显差异。威胁概率值的大小,直观的表示出了所选航迹的威胁强度大小,在不考虑其它因素的情况下,UAV 飞行优先选择威胁概率值小的航迹。利用此方法进行威胁概率求解分析,可以为UAV 的航迹最优选择提供科学的理论依据。
利用INs进行威胁估计相比贝叶斯网络,有以下优势:
(1)INs提供了一种有效表示航迹威胁情况的框架,各节点利用因果强度逻辑参数表示相互间的关系,相比贝叶斯网络指定的参数个数大大减少,能够更直观明确地描述各威胁源与各条航线威胁度之间的关系;
(2)由于战场环境具有不确定性,因此可能出现的情况较多。利用贝叶斯网络进行威胁分析时,其计算的复杂度随着环境因素数目的增长呈指数倍增加,而用INs对某一条航迹的威胁概率进行求解时,只需激活所求航迹上的节点,其余节点处于非激活状态,相比贝叶斯网络降低了计算的复杂度,提高了问题求解的效率。
4 结束语
针对UAV 航迹规划对航迹威胁强度的要求,以及战场环境复杂,不确定因素多的特点,本文提出了一种基于INs的战场威胁强度评估建模方法。首先利用INs求解思路对战场环境中基本情况进行分析,建立INs关系结构图,利用CAST 逻辑参数法对各个因素间关系进行表示,求解出所选航迹的威胁概率值,最后针对具体威胁区域案例,对不同威胁区威胁情况进行了计算与分析。利用INs法进行战场威胁强度评估建模,能够直观清晰的表示出各因素之间的逻辑关系,能够简便有效的计算出威胁区域的威胁概率值,降低了问题的复杂度,提高了问题求解的时效性,为航迹的选择提供了有效的科学指导依据。
[1]YE Wen,FAN Hongda,ZHU Aihong.Mission planning for unmanned aerial vehicles [M].Beijing:National Defence Industry Press,2011 (in Chinese). [叶文,范红达,朱爱红.无人飞行器任务规划 [M].北京:国防工业出版社,2011.]
[2]WANG Xiaoyi,LIU Zaiwen,HOU Chaozhen,et al.Method of object threat assessment based on fuzzy MADM [J].Control and Decision,2007,22 (8):859-863 (in Chinese).[王小艺,刘载文,侯朝桢,等.基于模糊多属性决策的目标威胁估计方法 [J].控制与决策,2007,22 (8):859-863.]
[3]WANG Gaige,GUO Lihong,DUAN Hong,et al.Target threat assessment using glowworm swarm optimization and BP neural network[J].Journal of Jilin University:Eng and Technol Ed,2013(4):1064-1069(in Chinese).[王改革,郭立红,段红,等.基于萤火虫算法优化BP神经网络的目标威胁估计 [J].吉林大学学报:工学版,2013 (4):1064-1069.]
[4]DU Jiyong,ZHANG Fengming,YANG Ji,et al.Assessment of air defense threat based on fuzzy theory [J].Fire Control &Command Control,2012,37 (10):89-92 (in Chinese).[杜继永,张凤鸣,杨骥,等.基于模糊理论的防空系统威胁评估方法 [J].火力与指挥控制,2012,37 (10):89-92.]
[5]XIONG Jie,LIU Xiangwei,LI Jun.Situation assessment algorithm based on Bayesian network [J].Modern Defence Technology,2009,37 (5):73-76 (in Chinese). [熊杰,刘相伟,李俊.基于贝叶斯网络的态势评估算法研究 [J].现代防御技术,2009,37 (5):73-76.]
[6]ZHAO Jianjun,WANG Yi,YANG Libin,et al.Air defense threat assessment based on dynamic Bayesian network [J].Computer Technology and Development,2012,22 (11):138-140 (in Chinese).[赵建军,王毅,杨利斌,等.基于动态贝叶斯网络的防空作战威胁估计 [J].计算机技术与发展,2012,22 (11):138-140.]
[7]LI Man,FENG Xinxi.Threat identification based on Bayesian networks[J].Modern Defence Technology,2009,37 (5):10-13 (in Chinese).[李曼,冯新喜.基于贝叶斯网络的威胁识别 [J].现代防御技术,2009,37 (5):10-13.]
[8]SU Weipeng,HAO Yongsheng,ZHA Xiaoxiao.Applied research of Bayesian net in air intelligence target threat assessment[J].International Electronic Elements,2013,21 (7):84-87 (in Chinese).[苏伟朋,郝永生,查潇潇.贝叶斯网络在空情目标威胁评估中的应用研究[J].电子设计工程,2013,21(7):84-87.]
[9]ZHANG Jieyong,YAO Peiyang,SUN Peng.Modeling of COA problem of C2organization based on dynamic influence nets[J].Computer Science,2012,39 (5):95-98 (in Chinese).[张杰勇,姚佩阳,孙鹏.基于动态影响网的C2组织COA 问题建模 [J].计算机科学,2012,39 (5):95-98.]
[10]Zaidi AK,Papantoni TP.Theory of influence networks[J].Journal of Intelligent & Robotic Systems,2010,60 (3-4):457-491.
[11]YANG Cuirong,WANG Mingzhe,LIAO Jingjing.Department of control science and engineering [J].Journal of Applied Sciences,2010,28 (6):639-645 (in Chinese).[杨翠蓉,王明哲,廖晶静.用影响网分析复杂系统关键事件 [J].应用科学学报,2010,28 (6):639-645.]