一种交会时间固定的调相分析方法
2014-12-21孙国童张柏楠马晓兵
孙国童,张柏楠,马晓兵,黄 震
(中国空间技术研究院 载人航天总体部,北京 100094)
0 引言
我国载人航天工程已突破并掌握了交会对接技术,为后续空间交会对接任务奠定了良好的技术基础。在后续交会对接任务中,目标飞行器不需配合调相,它与追踪飞行器间的相位角完全由追踪飞行器调相,要求追踪飞行器具备更强的相位适应能力。但是,后续交会对接仍然在推进剂最省与交会飞行时间固定两个约束条件下实施。在推进剂最省的约束下,调相轨道的半长轴只能在初始轨道与目标轨道之间选择;在交会时间固定的情况下,追踪飞行器无法通过在调相轨道上飞行足够长的时间实现任意相位的调整。当追踪飞行器在轨相位调整能力不足时,只能通过地面等待,即选择在目标飞行器的纬度幅角落入相位调整能力范围内的窗口发射追踪飞行器入轨。因此,在目标飞行器不配 合调相的情况下完成空间交会对接任务,需要权衡地面等待时间与推进剂使用量的关系,合理规划追踪飞行器交会对接调相轨道控制策略,充分利用有限的推进剂与交会时间资源,最大限度地提升追踪飞行器的调相能力、缩短地面等待时间。可见,提升追踪飞行器的调相能力对标准化追踪交会调相过程、增加发射窗口数量均具有重要意义。
本文研究在目标飞行器不配合调相的情况下追踪飞行器的交会对接调相轨道设计问题,考虑推进剂最省和交会时间固定的约束条件,着重从以下两个方面入手:一是定量分析不同地面等待时间对应的调相需求;二是充分利用推进剂和时间资源提升追踪飞行器在轨调相能力。通过这两个方面的工作,找到提升追踪飞行器调相能力的有效途径,为地面等待时间与推进剂分配量的权衡决策提供参考。
1 调相需求分析
假设目标飞行器不主动为交会对接作相位调整,需要追踪飞行器通过地面等待并重新规划远距离导引段调相轨道策略,以适应不同共面时刻的目标飞行器的不同相位。显然,采取“适应每个共面时刻的目标所处相位”与“通过地面等待方式适应某个共面时刻的目标相位”的策略对追踪飞行器的调相能力需求是不同的,但从另一角度讲,在一段时间内发射窗口的数量决定了对调相能力的需求。
为方便研究调相需求问题,首先定义发射窗口密度的概念:若在任意连续的n(n为正整数)天内存在一个共面时刻,追踪飞行器的调相能力可以适应该时刻的目标相位,则发射窗口密度为1/n。
在发射窗口密度的基础上,为了定量计算调相需求,下面提出一种适用于轨道高度不大于450 km的近圆交会对接轨道的调相需求计算方法。
假设目标飞行器在交会对接轨道,相邻共面时刻相位变化量为δu,取值范围为[0°, 180°]。u1为目标第1天共面时刻所处相位,取值范围为[0°, 360°],ui(i=1, 2,···,n)为第i天共面时刻目标所处的纬度幅角。αd为对追踪飞行器的调相需求,如图1所示。
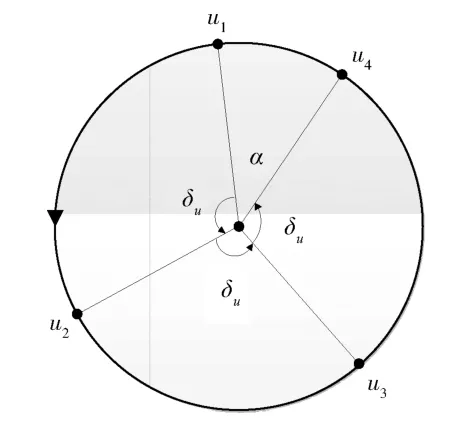
图1 调相需求示意图Fig.1 Illustration of phasing requirement
令α=mod(360,δu),N=floor(360/δu),则调相需求为
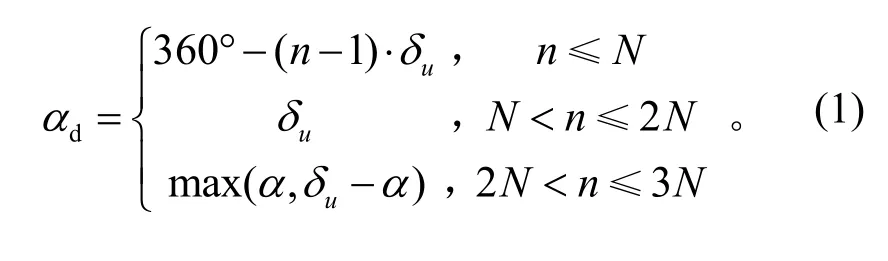
可以看出,调相需求主要与目标飞行器在交会对接轨道的相位回归特性以及发射窗口密度相关:整数天相位回归的交会对接轨道较为特殊,仅在发 射窗口密度定义中的n小于回归天数N时,调相需求才随发射窗口密度变大而提高;对于其他轨道,相同交会对接轨道条件下,发射窗口密度越大,调相需求越高。
2 调相能力分析
2.1 调相原理
调相基本原理根据开普勒第三定律[1]

式中:a为轨道半长轴;T为轨道周期;µ为地球引力常数。
追踪飞行器通过在半长轴小于目标飞行器轨道半长轴的轨道上调相,获取较大的角速度,经过Δt的调相时间后引起的相位差为其中,分别为追踪 飞行器、目标飞行器的平均角速度。
在推进剂最省原则下,将调相能力(δΔθ)定义为追踪飞行器与目标飞行器可实现交会对接的相位差区间的长度,即

2.2 调相策略
在推进剂最省原则下,采用的特征点变轨调相策略[2-5]:
1)第N1圈远地点施加迹向冲量ΔⅠt1,调整近地点高度;
2)第N2圈近地点施加迹向冲量ΔⅠt2,调整远地点高度;
3)第N3圈远地点施加迹向冲量ΔⅠt3,调整偏心率,进行轨道圆化。
2.3 误差因素影响分析
1)初始入轨误差
对调相产生影响的初始入轨误差主要来自3个因素:
① 半长轴误差ea
半长轴误差将导致轨道平均角速度误差,对相位角的影响将持续至第N1圈变轨前,经过Δt时间的累积,引起的相位角差异为[6]

② 入轨时间误差et
入轨时间误差直接影响两飞行器间相位差的初始值,对相位角的影响不随时间累积,引起的相位角差异为δθt=nTet。
③ 入轨纬度幅角误差eu
入轨纬度幅角误差直接影响两飞行器间相位差的初始值,引起的相位角差为eu。
在追踪飞行器调相能力范围内,上述3 种初始入轨误差对远距离导引段的终端影响非常小[7];初始入轨误差的影响主要发生在调相能力接近上下限的情况下。因此,提高初始入轨精度可以直接提升追踪飞行器调相能力。
2)轨控误差ev
考虑轨道机动误差的值(均方差)为机动冲量大小的线性函数:ev=c1ΔⅠt+c2,其中c1为表征控制延迟的常数项,c2为表征加速度计测量精度的常数项,ΔⅠt为机动冲量沿迹向的分量,则因轨道机动误差引起的相位角差为[6]
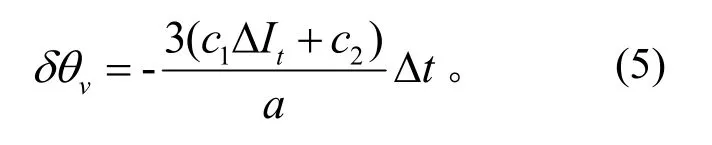
轨控误差对远距离导引终端的影响主要来自于最后一次轨道控制[7];缩短最后一次轨道控制与远距离导引终端的时间间隔,可以降低轨控误差的影响。
3 调相能力提升途径分析
由上述的调相原理分析可知,对于所采用的N个轨道周期的特征点变轨调相策略,追踪飞行器的调相能力可描述为

由式(6)可知,提升追踪飞行器调相能力的途径有两条:
1)增加调相轨道圈数N;
2)扩大追踪飞行器调相轨道半长轴变化范围。
3.1 增加调相轨道圈数(时间)
远距离导引策略中调相轨道的圈数决定了调相时间长短。因远距离导引段总圈数固定,受地面测量确定飞行器轨道(测定轨)能力约束,测定轨占用圈数越多,用于调相的轨道圈数越少。
通过压缩第一次轨控前、组合修正轨控前和远距离导引段终点前的测定轨时间,可至少提供额外的3 圈调相轨道。
增加调相轨道圈数即增加了调相时间,可在不额外增加推进剂消耗的情况下,显著提高调相能力,建议作为优先考虑的技术途径。
3.2 扩大半长轴变化范围
角速度差取决于调相轨道与交会对接轨道半长轴之差。追踪飞行器利用远距离导引段第一次变轨,调整自身轨道与交会对接轨道半长轴之差,实现对角速度差的调整,调整范围受制于推进剂约束和初始轨道远地点高度约束。
在推进剂最省原则下,式(6)中amax受运载能力和交会对接轨道高度限制,为常值。扩大半长轴范围主要考虑如何减小amin。
1)根据目标相位调整追踪飞行器初始入轨远地点高度
初始入轨远地点高度为定值,限制了amin的变化范围,从而导致追踪飞行器调相能力受限。
在推进剂分配量允许的范围内,根据目标飞行器相位,降低初始入轨远地点高度,减小amin的值,可实现调相能力的提升。
2)推进剂分配
为调相轨道提升所分配的推进剂越多,则初始入轨远地点高度下调范围越大,式(6)中amin取值越小,对应的相位调整范围越大。
4 算例分析
以倾角56°、高度405 km 的3 天回归轨道为例,对不同发射窗口密度下对应的调相需求进行仿真计算。显然,每天都有发射窗口对调相能力的需求为360°,其他发射窗口密度下在(405±10) km 的轨道高度范围内的调相需求如图2所示。
在目标飞行器交会对接轨道标称高度±10 km范围内对追踪飞行器调相需求的满足情况进行了仿真计算,将误差因素对调相的影响等效为调相需求,图3为调相需求满足情况。其中“原方案”指未采取提升途径的调相方案;“途径1”指采取压缩测定轨时间以增加调相圈数的方案;“途径1+途径2”指采取文中两种提升途径后的方案。

图2 不同发射窗口密度下的调相需求Fig.2 Phasing requirement for various launch window densities

图3 调相需求满足情况Fig.3 Match condition for phasing requirement
由图3可见,采取两种提升途径后,追踪飞行器调相能力可以满足发射窗口密度为1/3 的调相需求。仅采取“途径1”时,调相能力与调相轨道圈数呈正比例关系,与理论分析结论一致;同时采取途径1、2 后,在标称高度±10 km 范围内均能满足调相需求,但在交会对接轨道高度超过运载能力时,用于下调amin的推进剂量减小,导致调相能力降低。
5 结束语
通过本文提出的调相需求与能力匹配分析方法,得到了发射窗口密度、交会对接轨道高度和调相策略的关系。调相能力提升途径分析表明,能够利用追踪飞行器有限的推进剂资源,有效提高交会对接时间固定的在轨调相能力。后续需继续深入分析增加调相时间、扩大半长轴调整范围两条技术途径在工程实施中的可行性。
(References)
[1]刘林.航天器轨道理论[M].北京∶国防工业出版社, 2000∶37
[2]唐国金, 罗亚中, 张进.空间交会对接任务规划[M].北京∶科学出版社, 2008∶162
[3]张进.空间交会远程导引变轨任务规划[D].长沙∶国防科学技术大学, 2008
[4]罗亚中.空间最优交会路径规划策略研究[D].长沙∶国防科学技术大学, 2007
[5]Prussing J E, Chiu J H.Optimal multiple impulse time fixed rendezvous between circular orbits[J].Journal of Guidance Control and Dynamics, 1986, 9(1)∶17-22
[6]张进, 黄海兵, 王为, 等.空间交会目标航天器相位调整策略[J].中国空间科学技术, 2011, 31(1)∶33-41 Zhang Jin, Huang Haibing, Wang Wei, et al.Target spacecraft phasing strategy in orbital rendezvous[J].Chinese Space Science and Technology, 2011, 31(1)∶33-41
[7]汤溢, 王翔.航天器交会远距离导引段误差敏感度研究[J].航天器工程, 2010, 19(3)∶40-44 Tang Yi, Wang Xiang.Research on error sensitivity of spacecraft rendezvous phasing[J].Spacecraft Engineering, 2010, 19(3)∶40-44
