基于多阶段决策的侦察卫星任务规划研究*
2014-12-21乔熔岩赵新国
乔熔岩,赵新国
(解放军装备学院,北京101416)
0 引言
侦察卫星是利用光电遥感器或无线电设备等侦察传感设备,从轨道上对目标实施侦察、监测或跟踪,通过搜索地面、海洋或空中来获取军事情报的人造地球卫星[1]。侦察卫星的任务规划主要涉及两个问题:一是任务分配问题,即如何把任务科学合理地分配给卫星,以最大化满足用户的需求;二是传输调度问题,即如何调配地面接收站和卫星传输信息的时间,以满足各个卫星在互不冲突的时间窗口内,传输所获得的目标信息。
目前任务规划模型主要包括:1)Gabrel[2]等人提出的基于图论的模型,将侦察卫星的任务排列转换为一个加权有向无环图,求解的目标是寻找一条最大化完成任务的路径,该模型的缺点在于无法体现完成任务所需的其他约束条件,而且模型只适用于单颗卫星;2)Vasquez[3]等人提出的背包模型,该模型的缺点是不能描述复杂任务的约束条件,而且也只适用于单颗卫星;3)Bensana[4]等人建立的更一般的线性整数规划,该模型能够描述完成任务的各个约束,但求解效率会因约束太多而降低;4)Venfaillie[5]等人提出的加权约束模型,该模型可用更自然的语言来描述约束,建立过程较为直观,但当问题较大时,求解效率较低;5)Damiani[6]等人提出的有限阶段序贯决策模型,该模型可以考虑到一些影响局部赢得的不确定因素,但对于某些复杂约束,其求解效率将成指数速度下降;6)Chien[7]等人建立的状态与活动模型,该模型可以描述超出观察活动以外的所有可能的活动,但模型没有很好的优化功能。上述的这些模型大多都适用于单星,其中的一些模型只涉及了任务分配阶段的规划,没有专门对传输调度阶段进行建模;还有一些模型将多个过程都建立在一个模型里,造成约束条件较多,目标决策过于复杂,影响了求解的效率。为解决上述问题,本文将结合侦察卫星的特点,根据任务规划不同阶段的目标决策,建立基于多阶段决策的侦察卫星任务规划模型。
1 侦察卫星的工作特点
侦察卫星具有以下特点:第一,轨道相对固定;第二,存储比较有限;第三,需要时间转换[8](即卫星在连续执行两个以上任务时,需要有一定的时间转换,否则卫星只能完成其中一个任务)。除此之外,侦察卫星还具有数量有限、成本较高的特点,所以在规划任务时,应充分利用卫星资源,使其尽量兼顾多个任务,以弥补供需的不足。通常卫星要靠太阳能供电,其存储电池可提供应急所需的能量,所以本文在建立模型时,将假设卫星可进行全天候的工作。
2 任务分配模型
侦察卫星的任务分配是一个动态过程,但在一段时间内基本上是静态的,即各用户不会连续不断地提出任务需求。由此本文将整个规划过程,分成若干个时间段,将时间段内所提出的任务集中处理,以提高分配任务的效率。
2.1 相关定义
定义1:设集合W ={w1,w2,…,wm}表示某段时间内的侦察任务集,其中wi(ri1,ri2,…,rin)表示某项具体任务,riq表示任务wi的一个具体需求,如目标类型、侦察范围、目标分辨率等。
定义2:设集合S={s1,s2,…,sk}表示侦察卫星集,其中sj(cj1,cj2,…,cjp)表示某颗具体卫星,Cj={cj1,cj2,…,cjp}表示卫星sj的属性(性能)集,cjl(ajl)表示某一具体属性(性能),如存储量、数据传输速率、飞行轨道等,ajl表示属性(性能)cjl的具体数值或内容。
定义3:如果存在映射f,使得集合S 中的任意元素sj,都能在集合W 中找到若干个元素w1,w2,…,wk与之相对应,则称映射f 为一个任务分配策略,即。
定义3中的“对应”是指wi分配给卫星sj,但有的任务需要一颗卫星分多次侦察或多颗卫星共同来侦察,对于这种情况,可将该项任务进行分解,变成若干个由单颗卫星侦察一次就可完成的子任务,将这些子任务作为一个个独立的任务来处理,使其符合定义3。
2.2 模型的建立
根据每项任务的具体需求,结合卫星的属性(性能),建立如表1所示的对应表。
通过表1对卫星进行筛选,找出符合wi需求的拟分配卫星集Si={si1,si2,…,siq}(不考虑Si=φ 的情况),将与完成任务wi相关的卫星属性集记为Ci={ci1,ci2,…,cil},其中卫星sij的各属性值集合记为通 过 层 级 分 析 法[9],可 确 定 出各卫星完成wi的质量权重集Zi={zi1,zi2,…,ziq},将记为W 的拟分配卫星集,且SW⊆S,建立表2。

表1 对应表
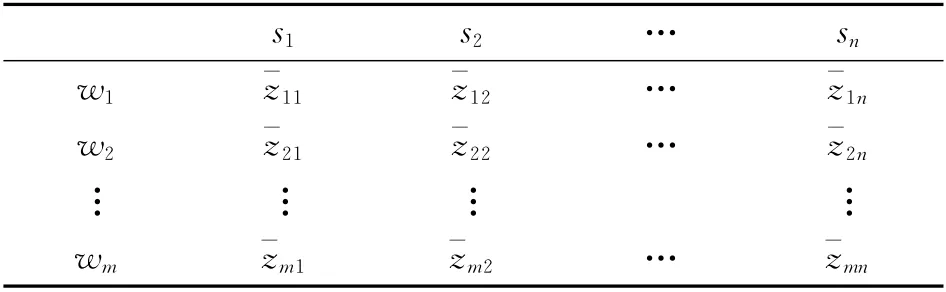
表2 完成质量权重表
在表2 中,当sj∈Si时,=zij;当sj∉Si时,=0。将表2转化为:
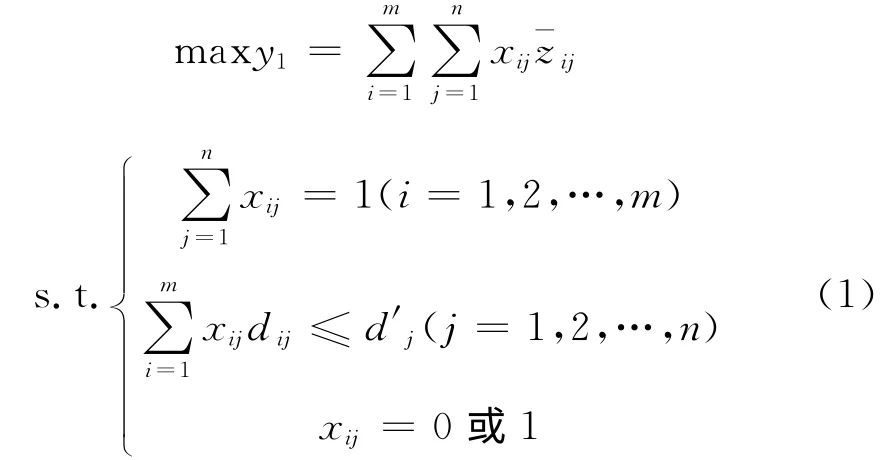
式中,xij=1表示任务wi分配给卫星sj,否则xij=0;dij表示完成wi需占用卫星sj的存储量,d′j表示卫星sj的剩余存储量,利用求解0-1整数规划[10]的方法,可得出卫星sj的拟分配任务集Wj。对于卫星sj来说,分配任务是一个动态过程,即在分配新任务之前,卫星sj可能还有预定的任务要完成,这就要求新任务不能与原有任务发生冲突,而且新任务之间也不能有冲突,为此本文建立如图1所示的任务关系图。
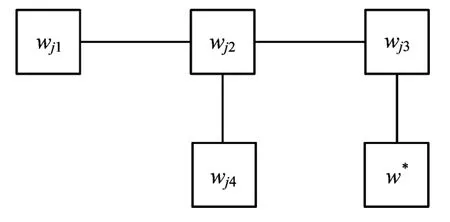
图1 任务关系图
图1中集合Wj={wj1,wj2,wj3,wj4},w*为原有待完成的任务,将有冲突的两个任务用直线连接,为找出合理的分配方案,进行如下的图上作业法:1)将原任务和与原任务有连线的新任务在图中删除(包括连线),即删除w*和wj3;2)在剩下的图中,找出连线最多的任务,即任务wj2;3)找出将与任务wj2没有冲突的任务,并将它们和wj2编成一组,记为分配策略1;4)将策略1中的任务(包括连线)在图中去除;5)在剩下的图中重复第二步骤操作,以此类推,直到把任务全部编组完成;6)比较各分配策略,找出包含任务最多的编组,将该编组作为sj的分配策略Wj0(即初始分配策略)。
按照上述的方法,可以求出每颗卫星初始任务的分配策略,然后求出,其 中W′={w′1,w′2,…,w′k}表示没有分配到卫星的剩余任务集,建立式(2):
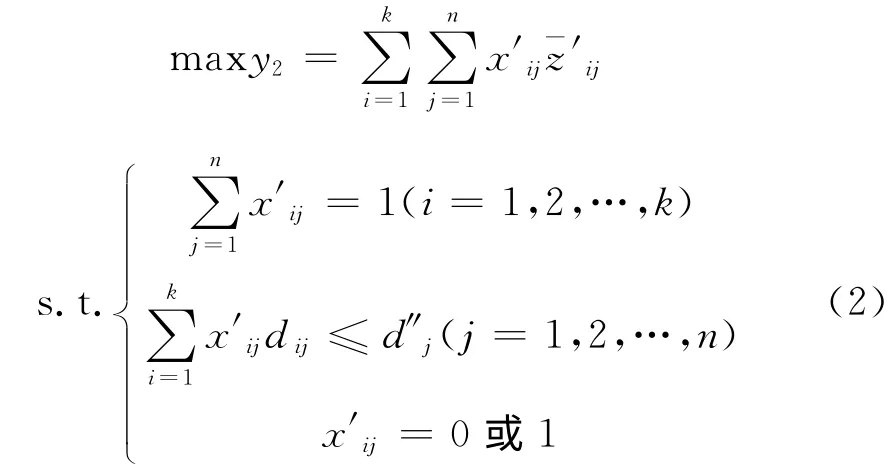
式中,当w′i∈Wj时(避免重复冲突),当w′i∉Wj时,d″j表示卫星sj在假设完成Wj0中任务后,还剩余的存储量。通过对式(2)的求解,又可建立各卫星新的任务关系图,然后按照图上作业法,确定出新的分配策略,以此类推,直到把所有任务都分配完毕或各卫星均已达到饱和状态为止。将最终的分配策略记为定义3中的映射f,如果此时还有任务没有被分配,则这些任务只能等待各卫星完成任务后,重新参加下一轮的分配。
2.3 模型的改进
上述的分配模型主要以卫星完成任务的质量为参考标准,该模型适用于常规任务的分配需求,而在实际中,有时会出现一些紧急任务或需求用户的级别较高,用户需要卫星及时提供某区域的情报,这就要求分配任务时,不但要考虑卫星的性能,还要考虑执行侦察的时段和完成任务的时限,为解决这一问题,本文将建立如下的改进模型:
根据任务wi的级别将W 分为两类,即优先任务集W(1)和普通任务集W(2),其中W(1)包括紧急任务和高级别用户的任务,W(2)包括非紧急的常规任务,且满足W =W(1)∪W(2),W(1)∩W(2)=φ。在分配卫星资源时,应首先保障W(1)中的任务,然后再考虑W(2)中的任务。假设通过表1确定出为完成W(1)的拟分配卫星集,集合表示各卫星完成侦察的最短延迟时间,其中表示卫星完成任务的最小时延,其大小等于飞到侦察区域的时间加上执行侦察的时间。定义卫星完成任务的效能权重为,其中为卫星完成任务的质量权重,e为调节系数。下面建立目标决策模型,如式(3)所示,其中表示任务占用卫星的存储量表示卫星的剩余存储量,但与式(2)中的d′j不同,因为现在所要执行的是优先级任务,如果原来预定的任务不是优先的,其数据可以被替代,以确保优先级任务的完成,所以的值只是存储总量与预定优先级任务所需存储量的差。

3 传输调度模型
将地面接收站集记为集合G={g1,g2,…,gk},假设一个接收站在同一时间内,只能接受一个卫星的数据,通常情况下,集合S 与G 不是一一对应关系。一般接收站都会先满足优先级任务,而当多个卫星都承担优先级任务时,就要尽量避免这些卫星在有冲突的时间段进行数据传输,为解决这一问题,本文将建立如下的传输调度模型:

第一步,将矩阵中每一列的数值相加,找出实数部分最小的一列,并选出该列所对应的时间窗口,例如或(这里以为例);


第七步,检验剩下的矩阵,如果该矩阵为零矩阵,则停止操作,将该矩阵中的时间窗口记为一个调度策略
第八步,将策略1中的时间窗口在式(4)中删除,然后重复第一步的操作,以此类推,直到找出新的策略为止,例如策略
第九步,比较各个策略,找出包含时间窗口数最多的一个,如果数量相同,则选择完成时延最小的一个策略。例如策略和假设对于用户来说,卫星选择比选择的时延要小,而对于和来说,选择和要比选择和的时延要小,那么综合比较就采用策略
4 结束语
本文结合侦察卫星的工作特点,依据任务规划不同阶段的目标决策,建立了基于多阶段决策的侦察卫星任务规划模型,即任务分配模型和传输调度模型。该模型首先将任务进行分级和分解,然后根据对应表建立拟分配任务的卫星集,从而缩小所涉及卫星的范围,以减少目标决策的数量规模,利用层次分析法确定卫星完成任务的效能权重,并建立任务分配的决策模型;为避免计算的复杂性,分配模型中的约束没有涉及完成任务时可能出现的时间冲突,而是在得出拟分配方案后,利用所建立的任务关系图,通过图上作业法来解决,以此使得分配模型更加简明,计算流程更加清晰,从而提高求解的效率;为解决卫星传输数据时可能发生的冲突,本文根据假设的情况,建立了卫星传输时间的关系矩阵,给出了一种求解模型的基本方法,从而较好地解决了这一问题。综上所述,本文建立的基于多阶段决策的侦察卫星任务规划模型,具有一定的理论与应用价值。■
[1]王永刚,刘玉文.军事卫星及应用概论[M].北京:国防工业出版社,2003.
[2]Gabrel V,Vanderpooten D.Enumeration and interactive selection of efficient paths in a multiple criteria graph for scheduling an earth observing satellite[J].European Journal of Operational Research,2002,139(3):533-542.
[3]Vasquez M,Hao JK.A “Logic-constrained”knapsack formulation and a Tabu algorithm for the daily photograph scheduling of an earth observation satellite[J].Computational Optimization and Applications,2001,20(2):137-157.
[4]Bensana E,Verfaillie G,Agnese JC,et al.Exact and approximate methods for the daily management of an earth observing satellite[C]∥Munich,Germany:Symposium on Space Mission Operations and Ground Data Systems,1996.
[5]Bensana E,Verfaillie G.Exact and approximate methods for the daily management of an earth observation satellite[C]∥Proceeding of the 4th International symposium On Space Mission Operation and Control Date System,1996.
[6]Verfaillie G.Russian doll search for solving constraint optimization problems[C]∥Portland,Oregon,USA:Proceedings of AAAI-96,1996.
[7]Chien S,Sherwood R,Rabideau G.The Techsat-21 autonomous space science agent[C]∥Proc of the 1st International Conference on Autonomous Agents.NewYork:ACM Press,2002.
[8]黄文清,等.空间信息系统建模与效能仿真[M].北京:解放军出版社,2010:96-97.
[9]胡运权.运筹学教程[M].北京:清华大学出版社,2007.
[10]陈庆华,等.装备运筹学教程[M].北京:国防工业出版社,2007.
[11]陈庆华,吕彬,李晓松.系统工程理论与实践[M].北京:国防工业出版社,2011.
[12]陈宝林.最优化理论与算法[M].2版.北京:清华大学出版社,2005:37-50.
