清污超声相控声源阵列设计
2014-12-19周泽均欧阳清施冠羽
周泽均,欧阳清,施冠羽
(海军工程大学 机械工程系,湖北 武汉430033)
0 引 言
海洋污损物也称为海洋附着物,是指一切附着丛生在水下人工设施及舰艇等海洋结构物表面并导致其损坏或产生不良影响的动物、植物、微生物和污垢的总称。污损生物的活动对海洋结构物所产生的损坏或不良影响称为污损,对海洋污损生物的防除称为防污[1]。海洋污损物对船舶、港口等重要设施的污损带来巨大的危害和经济损失,因此必须对污损物进行有效防治和清除。在现有清污方式中,超声波在清污除垢方面与其他除垢方法相比,清除更彻底、实现更容易,且对污损物的附着基底损伤很小[2],这对船体清污尤为重要。目前超声波船体清污应用较少,主要受到水下单个声源声压级和辐射功率的限制。为此,本文旨在应用超声波清污的巨大优势研究探索用以船体清污的超声声源阵列。
1 超声波清污机理
超声波清污除垢技术是采用大功率低频超声波,依靠超声波在液体中产生的空化效应、活化效应、剪切效应、抑制效应、高速微涡效应和冲刷效应等以实现清污除垢的[2-3]。超声波脉冲的工作原理如图1 所示。
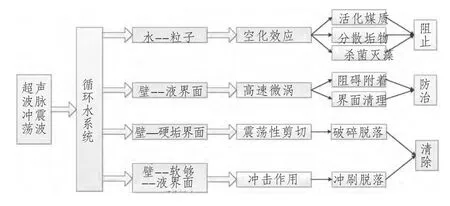
图1 超声波脉冲原理图[3]Fig.1 The map of acoustic wave′ impulse theory[3]
在超声波引起的这些效应中,空化效应起最主要的作用。空化效应会产生高温(可高达5 000 K 以上,相当于太阳表面的温度,温度变化率达109 K/s)、高压(可高达数百乃至上千个大气压,相当于大洋深海沟处的压力)和高射流(时速可达400 km)等极端的环境[2-4],并且释放出巨大的能量,这样的环境中污损生物能很快被杀死且生物结构被严重破坏,最后脱落。另外,空化使垢物微粒的形体改变,并使垢物微粒团间的亲和力降低,经超声波处理后的硬度盐微粒在成垢条件下只能析出疏松粉末状垢物,不再沉积板结。
2 超声声源阵列设计
2.1 技术指标
本文研究的声源阵列用于船体清污,根据理论研究和实际操作的可行性,对该研究的技术指标提出如下要求:
1)作用对象:一般船艇(以船长在20 m 以下小船为模拟对象);
2)作用距离:焦距R0≥5 m;
3)岸基安放于港口或码头;
4)焦点处能形成空化效应(通常水域中,空化阀值作用范围为18 ~38 MW,一般要求功率大于22 MW[5];40 ℃时水汽化的临界压力为0.72 mH2O,1 mH2O=9806.65 Pa[6]);
5)移除力≥180 N,移除力强度≥0.93 MN/m2,产生的流速≥2 m/s[7]。
海洋污损生物在船体附着是随机的,船体吃水区域密集分布,清除起来需要对船体进行来回扫描,如果声源阵列的焦距过小,则不能很好的实现焦点在船体上的偏移。以20 m 以下小船为清污模拟对象,焦距(指焦点到声源阵列平面的最短距离,当焦点处于阵列平面正中心的法线上时的焦距定义为正焦距)要求尽可能远,根据模拟和实际可能确定必须大于5 m。阵列设计为岸基设施,即岸基安放、停机清污。
2.2 声源阵列总体设计
水下相控声源阵列要得以实现,包括的不仅仅是阵列面板这一可见的部分,还有着复杂的电路等结构。
对相控声源阵列整体结构采用模块化设计,将整个系统设计为几个模块,分别为电源模块、人机交互界面、控制模块、信号发生模块和声波发射模块,总体结构如图2 所示。
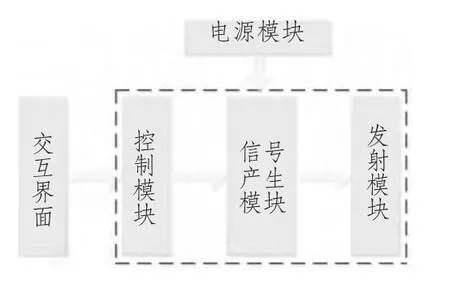
图2 声源阵列模块结构图Fig.2 The map of structure of sources arrayed
电源模块:将外接的交流电源引入,然后根据后续电路和电子器件的工作要求,进行升压、降压、分压、稳压等处理,对不同的部件提供相应的能量。
人机交互界面:通过人机交互界面将操作人员和声源连接起来,实现对声源阵列的具体操作和控制。
控制模块:主要指工控计算机,在整个系统中必须能对阵元声源的输入信号进行准确计算和精确控制。在对焦点位置精确解算后计算出所有阵元的驱动向量后,控制后续电路产生信号。
信号产生模块:接收控制模块的信号,控制函数信号生成系统,生成驱动阵列阵元的函数信号。
发射模块:指声源阵列,各个阵元根据生成的函数信号工作,形成声束,在目标点实现聚焦,利用焦点的高声压级和声强级引起海水的空化效应,从而进行清污。
声源阵列各个模块之间的关系可以用图3 来表示。本文旨在研究声源阵列聚焦、焦点变化状况、清污能力及几者间相应的联系。
本文重点讨论声源阵列合成声场的声波辐射情况和焦点声压级及焦点的控制情况,这里对总体结构和电路模型不做讨论。
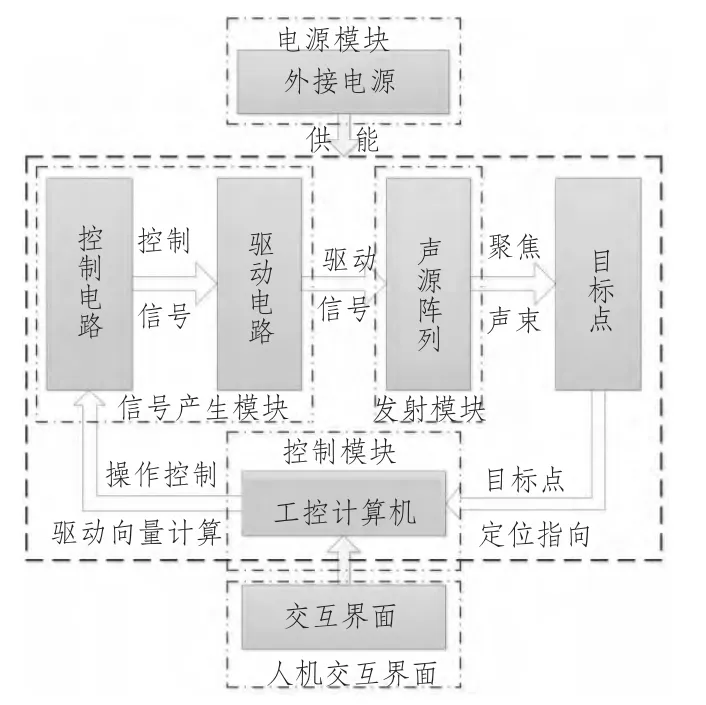
图3 声源阵列模块关系图Fig.3 The map of modules of sources arrayed′ relation
2.3 声源阵列结构设计
2.3.1 阵元声源
选用电声换能器声源中的超磁致活塞式声源作为声源阵列的基础声源,即阵元声源。该声源是利用超磁致伸缩材料(giant magnetostrictive material,GMM)在电磁场中发生伸缩变化而将电能转化为机械能,再通过带动活塞面的振动向水介质辐射声波而最终转化为声能,其转化效率高、声波辐射具有很好的指向性和可控性。经试验和计算,得到该声源的各项性能参数,如表1 所示。
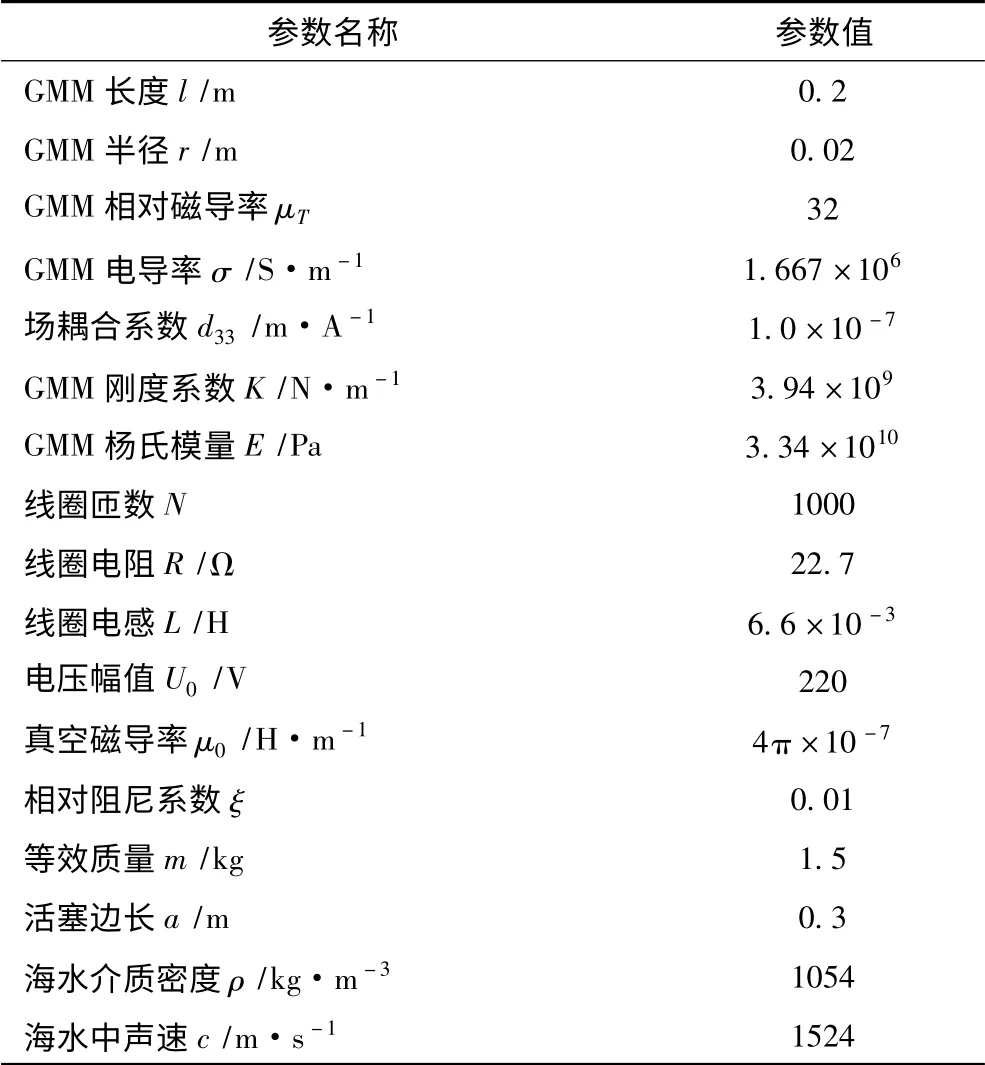
表1 基于超磁致伸缩材料的活塞式水下声源的基本参数[8]Tab.1 Essential parameter of underwater piston sound source based on GMM[8]
超磁致伸缩材料的伸长量一般在10-4m 的数量级[9],由此计算得声源的主频ω =1 ×105Hz,振幅模量B =1.09 ×10-4m,振速模量u =10.90 m/s。
综上所述,用于清污声源阵列的基础阵元声源采用超磁致活塞式声源的具体参数值如下:
声源类型:电磁式声源;
声源元件:超磁致伸缩材料;
等效质量:m=1.5 kg;
阵面形状:正方形;
阵元边长:0.3 m;
固有频频:ωn=5.125 ×104Hz;
拟定工作主频:ω =1 ×105Hz;
均匀振速:u0=10.90 m/s;
辐射功率:P0=4.079 ×105W。
2.3.2 阵元总数
根据上述技术指标和阵元声源参数,要使声源阵列能在焦点处产生空化效应,声源阵列的总辐射功率PM至少要达到22 MW。为使声源阵列有足够的容积功率,再考虑到聚焦中的功率损失和聚焦的有效性,所有阵元声源的功率总和必须足够大。
单个声源以1 ×105Hz 频率工作时,基础功率P0=4.079 ×105W,取100 个阵元,阵列粗略功率Pc=∑P0=4.079×107W=40.79 MW≈40 MW,约为指标功率阀值22 MW 的1.8 倍,足够满足指标要求。这样,阵元声源总数设定为100,阵元间距设为0.2 m[10-11],为方便焦点的控制而在阵列中心添加指向仪,用于测定阵列面距船体的距离和焦点的位置偏移,声源阵列的正面视图如图4所示。
阵列以矩阵方正阵列方式排列,100 个阵元排列成10 ×10 方正,为简化模型在允许的范围内将阵列面板作为一个整体处理[12],可以得到阵列的技术指标。为能保证阵列有足够的扫描范围,中心位置O 处指向仪的偏转角度必须大于等于阵列的扫描角度,在设计中规定以阵列面中心O 处法线为空间坐标系 的Z 轴,建立XYZ 坐标系,指向仪射线与Z 轴夹角β 为指向仪的偏转角。
2.3.3 工作方式设定
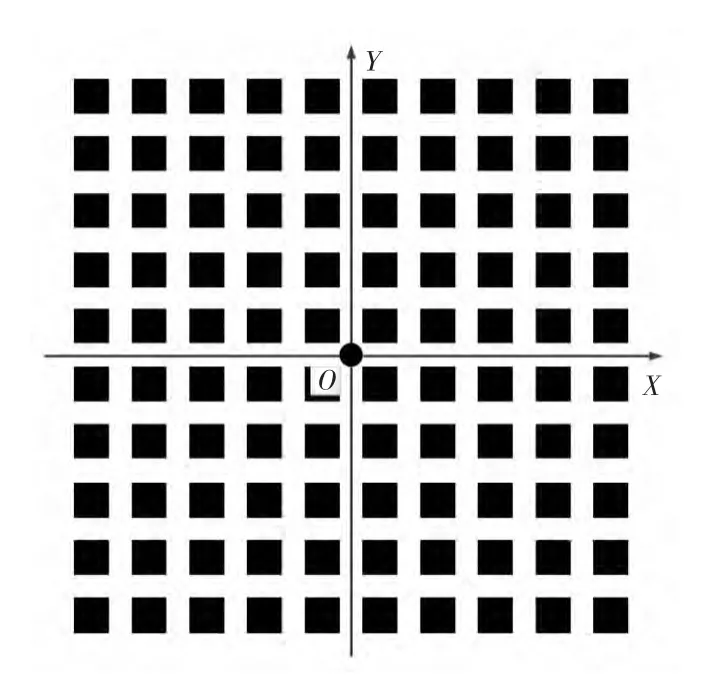
图4 声源阵列正面视图Fig.4 View of the obverse side of sources arrayed
1)指向仪测距。指向仪首先对停泊的船体面测距,测出此状态下声源阵列表面中心法向上距离船体表面的距离,即指向仪处距离船体表面的距离,并规定这个距离为声源阵列的正焦距R0。
2)聚焦区域映射。将规定的聚焦面正投影到船体上,从船体表面截取相应的焦点扫描面。
3)指向仪向聚焦面指向,传回位置信息。指向仪发出指向测距波束到聚焦面的端点(规定为图5 中聚焦区域投影平面的A 点),计算出该点相对声源阵列的空间位置,位置信息由阵列的XYZ 空间坐标系(见图6)来表达。
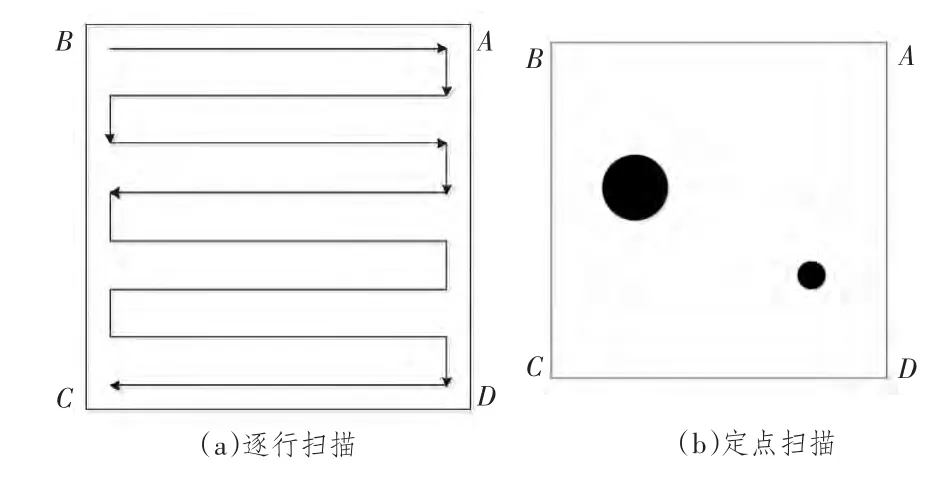
图5 焦点扫描示意图Fig.5 The sketch map of focus scanning
4)阵元声源的驱动向量生成,指向点聚焦。工控机根据3)传回的空间点位置信息,按照相应的原则计算出阵列中所有阵元声源的驱动信息,生成阵列的驱动向量,驱动阵列辐射声波,在指向点聚焦,开始清污。
5)指向仪指向焦点扫描整个聚焦平面。对聚焦平面的扫描方式设定为定点扫描和逐行扫描两种模式。逐行扫描根据焦点区域的大小,将整个聚焦面在水平方向上划分为若干行,指向仪依次逐行“指挥”焦点扫过整个聚焦面,完成该面域内的清污,如图5(a)所示;定点扫描是在聚焦平面内当某个点的污损物过多而普通清理难以完全清除时将焦点长时间定位此处的工作模式,即人为选定某点聚焦且控制焦点停留的时间,如图5 (b)所示。
2.3.4 聚焦区域设定
声源阵列中建立的XYZ 坐标系如图5 所示。设计中,焦点的控制由指向仪来实现,指向仪绕Z 轴偏转角β 的范围为0°~60°,所指向的范围较大,见图6中圆锥区域O-K0K1K2K3。在此区域中阵列聚焦并不能完全达到,而且旁瓣等还可能出现在此区域外。为了在清污时能准确聚焦,必须明确阵列的聚焦区域,即焦点偏移移动的范围。根据阵列尺寸和达到尽可能好的聚焦效果而又不造成大量的可聚焦区的浪费,这里人为规定有效聚焦区域,即阵列的可工作区域,见图5 中的ABCD -A1B1C1D1,其中平面ABCD 称为聚焦平面。聚焦区域尺寸为2 ×2 m,投影到阵列面的XYZ 坐标系中XOY 面上为A′B′C′D′,4 个端点的坐标分别为:A′ (2,2),B′ (-2,2),C′ (-2,-2),D′ (2,-2)。把整个声源阵列看作一个整体平面,即阵列面EFGH,在坐标系里分别表示出来为:E(4.8,4.8),F (-4.8,4.8),G (-4.8,-4.8),H (4.8,-4.8),OO′为阵列面法向上距船体的距离R0,定义为正焦距。
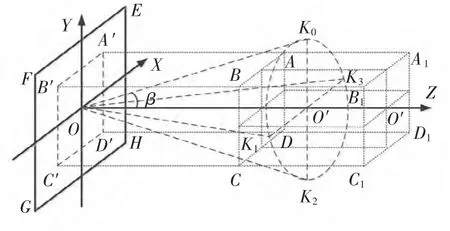
图6 声源阵列聚焦区域示意图Fig.6 The sketch map of focus area of sources arrayed
2.3.5 聚焦计算
声源阵列由100 个阵元声源构成,工作时所有的阵元都会向媒介辐射超声波,这样,声源阵列的声场就是所有阵元声源声场的叠加结果。为研究声源阵列的声场,必须清楚单个阵元声源的声场,同时要对阵列的复合声场作相应的简化处理。
对单个阵元声源来说,空间声场中声波辐射方向上任意点的声压p 可由瑞利积分计算出来:

当声源由N 个阵元组成、存在M 个控制焦点时,焦点的声压可表示为:

式中:m =1,2,…,M,M 为声场焦点的个数;n=1,2,…,N,N 为相控阵中阵元的个数;rmn为第m 个焦点相对于第n 个相控阵阵元中心的距离;pm为第m 个焦点处的声压。本文只考虑一个焦点的情况,则m=1。
根据国家军用标准中的舰船噪声测量方法,浅海目标辐射噪声的测量通常选用0 ~100 m 的距离,在此距离内,海水本身对声波能量的吸收很小可以忽略不计,而且海水介质的密度ρ、声速c、界面的反射系数可以人为不跟随时间的变化。故而,这里媒介的声吸收系数α =0。
这样,式(2)可改写为:

式中P 为焦点处的合成声场声压。
焦点的正焦距为R0,式(2)和式(3)中的rn(即rmn)为焦点到第n 个阵元中心的距离,即焦点阵元距。为方便计算(见图7),将rn= RMN直接定义为:

图7 焦点阵元距表示Fig.7 Expressing distance between focus and element of array
联合式(1)~式(4),代入阵元声源中的数值,编程计算求得单个声源辐射方向10 m 处声压p0和阵列面板Z 轴上10 m 处正焦点声压PO′10分别为:
活塞式声源的辐射声压级为:

式中pref为参考声压,一般取值为2 ×10-5Pa。此外,声压与声压级的关系:

根据式(5)和式(6)可求得声压级分别为:
SL10= 218.31 dB,SL10= 218.32 dB,
SLO′10= 258.20 dB,SLO′10= 258.22 dB。
同样可得聚集平面4 个边界点ABCD 处的声压和声压级分别为:
PA= PB= PC= PD= 1.5879 ×108Pa,
SLA= SLB= SLC= SLD= 257.99 dB,
SLA= SLB= SLC= SLD= 258.01 dB。
计算程序流程如图8 所示。
图8 计算流程图Fig.8 Flow chart of calculation
2.4 计算仿真
根据划定的聚焦区域内不同点的合成声场声压值的变化情况,构建相应的模型,对声源阵列合成声场声压进行仿真计算,仿真结果如图9 所示。
从仿真计算结果可看到:
1)聚焦形成在5 ~10 m 的区域内。0 ~5 m 区域为聚焦盲区,波束不能有效汇聚而形成焦点;
2)同一聚焦平面内Z 轴上焦点声压最大,焦点向Z 轴偏离而声压依次衰减;
3)在可见的聚焦区域内,焦点声压从5 ~10 m依次增强,在10 m 处达到最大。
图9 仿真结果图Fig.9 Simulation result map
4 结 语
从以上计算和仿真结果可得出如下结论:
1)将计算结果与技术指标比对,所设计的超声声源阵列完全满足提出的标准:声源阵列的合成声场声压级可达258 dB,与单个阵元声源的最高声压级218 dB 相比提高了18%以上;输出功率40 MW,为指标功率22 MW 的180%;正焦距可达10 m 以上,为指标焦距5 m 的200%;10 m 正焦点处声压1.6272×108Pa,远大于40℃时水汽化的临界压力。
2)在设定的聚焦区域内声源阵列具有良好的聚焦效果,波束在距离阵列面5 m 后开始有效汇聚,声压达250 dB 以上。
[1]黄宗国,蔡如星.海洋污损生物及其防除[M].北京:海洋出版社,1984:23 -25.HUANG Zong-guo,CAI Ru-xing. Marine fouling and its prevention[M].Beijing:Ocean Press,1984:23 -25.
[2]张艾萍,杨洋.超声波防垢和除垢技术的应用及其空化效应机理[J].黑龙江电力,2010,32(5):321 -324.ZHANG Ai-ping,YANG Yang. Application of ultrasonic antiscaling and descaling and its cavitation effect mechanism[J].Heilongjiang Electric Power,2010,32(5):321-324.
[3]孟延孝,曹丽.超声波防垢技术在循环冷却水系统的研究与实践[J].给水排水,2009(S2):240 -242.MENG Yan-xiao,CAO Li. Study and practice of ultrasonic descaling in circulating cooling water system[J]. Water Supply and Drainage,2009(S2):240 -242.
[4]张建锋.水力空化装置的设计及研究[D].天津:天津科技大学,2008.ZAHNG Jian-feng. Design and research of hydrodynamic cavitation equipment[D]. Tianjin:Tianjin Science and Technology University,2008.
[5]张利民.空化诊断和监测[J]. 东方电机,2004(1):416-150.ZHANG Li-min. Cavitation diagnosis and monitoring[J].Oriental Motor,2004(1):416 -150.
[6]郑源,陈德新.水轮机[M].北京:中国水利水电出版社,2011:53 -69.ZHEN Yuan,CHEN De-xin. Hydraulic turbine[M].Beijing:China Water Conservancy and Hydropower Publishing House,2011:53 -69.
[7]史航,王鲁明. 海洋污损生物藤壶的附着机理及防除[J].广东农业科学,2006(6):72 -74.SHI Hang,WANG Lu-ming. Attachment mechanism of marine fouling organism balanus and its defouling[J].Guangdong Agricultural Sciences,2006(6):72 -74.
[8]石小红.基于超磁致伸缩材料的活塞式水下声源[J].磁性材料及器件,2009(5):37 -39,63.SHI Xiao-hong. Underwater piston sound source based on gaint magnetostritive material[J]. Magnetic Materials and Devices,2009(5):37 -39,63.
[9]袁惠群,李鹤,孙华刚,等.超磁致伸缩换能器的声辐射特性[J].东北大学学报,2004,25(3):273 -276.YUAN Hui-qun,LI He,SUN Hua-gang,et al. Acoustic radiation characteristics of super magnetostrictive transducer[J].Northeast University Journal,2004,25(3):273-276.
[10]丁亚军,钱盛友,胡继文,等.多焦点超声相控阵在双层媒质中声场仿真[J]. 计算机工程与应用,2011,47(33):153 -155.DING Ya-jun,QIAN Sheng-you,HU Ji-wen,et al.Simulation of sound field of multi-focus ultrasound phased array in double biologic medium[J].Computer Engineering and Applications,2011,47(33):153 -155.
[11]胡继文,钱盛友,丁亚军.被控点声压直接加权的相控声场合成模式[J].声学学报,2011,36(6):626 -630.HU Ji-wen,QIAN Sheng-you ,DING Ya-jun. A synthesis pattern of field produced by phased array based on the direct weighting of the controlled acoustic pressure[J].Acta Acoustica,2011,36(6):626 -630.
[12]陈伟,曾德平,王华,等.超声相控阵输出声场优化及仿真[J].压电与声光,2011,31(1):96 -99.CHEN Wei,ZENG De-ping,WANG Hua,et al.Optimization and simulation for the output acoustic field of iltrasnic phased array[J].Piezoelectrics &Acoustooptics,2011,31(1):96-99.