应用CMS实现采空区的精密探测和三维建模
2014-12-17王丽君冯兴隆荀雪梅
王丽君,冯兴隆,荀雪梅
(1.玉溪矿业有限公司,云南 玉溪 653100)
(2.云南迪庆有色金属有限责任公司,云南迪庆 674400)
在地下矿山的生产过程中,形成了大量的采空区并且没有进行处理,现在进行处理时由于设计资料不全、丢失等原因造成无法确定其空间位置、形态和边界。这些地下空区,给矿山生产和工程建设带来了极大的安全隐患[1]。因此探明采空区的空间位置、形态和边界,已成为矿山开采的迫切需要,采空区探测与定位具有重要的现实意义。
1 采空区探测研究现状
采空区探测最早来源于各种以军事和地质找矿为目的的物理探测方法[2-3]。在物理探测方法中,美国在电法、电磁法、微重力法及地震勘探技术方面取得了全面的发展,俄罗斯主要采用直流电法及瞬变电磁法对采空区进行探测,同时井间电磁波透视、声波透视及射气测量技术在俄罗斯也取得了较快发展[4-7]。20世纪70年代,西方国家在矿山采空区探测中成功地应用了微重力法[2]。
探地雷达根据岩层与空区的界面两侧电性差进行空区探测,有着良好的应用效果,但探测深度有限[8]。地震法探测的深度较大,对于潜伏较深、不适合探地雷达工作的采空区,常常采用地震法进行探测[9]。电阻率法探测地下空区由来已久,早在20世纪七、八十年代,就开始用二维地电阻率技术探测地下巷道、采空区[10]。
近年来,频发的采空区安全事故使得对采空区探测的研究大大加强,各类物探技术和尖端技术都应用到采空区的探测中来。程久龙等利用探地雷达法进行了空区的探测[11];王俊茹等采用瞬变电磁法进行了空区探测[12];由于对采空区形态的准确把握的要求,近年来一些科研工作者采用三维激光探测方法进行采空区的扫描探测,如马玉涛等应用激光扫描仪对安庆铜矿的空区进行了探测[13],任洪文等应用三维激光扫描仪对焦家金矿的空区进行了探测[14],取得了很好的效果。
2 CMS工作原理
2.1 CMS 简介
三维激光空区探测系(Cavity Monitoring System,CMS)是基于激光扫描原理开发的专门用于井下采场和空区测量的系统。该系统20世纪90年代初由加拿大Noranda技术中心和OPtech系统公司共同研制成功,在矿业发达国家已成为地下采场和空区测量的主要手段,尤其是对危险和人员无法进入的空区探测中[1]。
CMS空区监测系统包括激光扫描头、电源和数据收发器、手持式控制器(PDA)、支撑杆、其他配件及数据处理软件。数据处理软件包括 CMSPosProeess和 QVOL,见图1。

图1 CMS系统基本硬件
2.2 CMS工作原理
CMS系统采用的是基于激光测距技术的一种探测方法。CMS激光测距仪采用的激光二极管几乎可以实现对任何材料物体的非接触测距,可以在黑暗或光照强的环境下使用而不需采用其他反射体或反射镜。扫描头发射的细小激光束不会产生错误的回波并可对远距离的小物体进行测距。激光束从粗糙的物体表面反射回来仍可被接收单元接收并实现距离测量[1]。
激光扫描头伸入空区后通过伺服驱动马达系统和同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,测量每个激光脉冲从发出经被测物表面再返回仪器所用的时间(相位差)来计算距离,同时扫描控制模块和测量每个脉冲激光的角度,最后计算出激光点在被测物体上的三维坐标[15]。原理如图2、图3所示。

图2 CMS系统基本工作原理示意图

图3 扫描点三维坐标计算方法示意图
激光扫描三维探测一般使用仪器自定义的坐标系统,X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,由此可得到三维激光脚点坐标的计算公式。

式中:S为测距观测值;α为横向扫描角度观测值;θ为纵向扫描角度观测值
CMS三维激光扫描对确定目标的整体或局部进行完整的三维坐标数据探测,在三维空间内进行从上到下,从左到右的全自动高精度步进扫描,可以真实地反映出目标的整体结构及形态特性。通过扫描得到的点云编织出的线框逼近目标的完整原形及矢量化数据结构,可进行空区的三维重建,建立的空区三维模型可以反映出空区的长度、体积、面积、结构位移等特性。
3 CMS使用方法
(1)选择仪器架设位置。根据采空区探测现场具体情况,考虑安全、设备架设和坐标点测量等因素后,选择理想的设备架设地点进行 CMS设备的安装。
(2)确定CMS扫描头伸入空区的合适位置,固定探头。将探测扫描头伸入到待测空区内,选择深入的位置能够避免岩石对激光的遮挡,而且还能使激光能够最大限度地到达空区的所有位置。
(3)采用手持式控制器设定探测抬升角度等参数。全部参数设定完毕后,CMS自动进行激光测量作业。
(4))为了将探测数据纳入矿区坐标体系,需要在对空区进行探测的同时,以附近的测点为基点,来测定CMS扫描头支架上两个点的坐标。
(5)扫描数据实时保存。手持式控制器上可以实时提供CMS扫描头当前状态的信息、已用时间、估计完成时间,并显示扫描的过程。在查看探测的文件数据已经从电源传输到PDA中后,作业完毕,扫描头恢复原位,回收仪器。
4 采空区三维建模
4.1 数据转换
运用CMS探测采空区获得的原始数据为“.txt”格式文件,文件中纪录了测量的2个角度和1个距离值。在对原始数据进行三维建模之前,必须对原始探测点云数据进行转换,将“.txt”格式的原始数据文件转换成“DXF”格式的文件。应用CMS自带的处理软件CMSPosProeess对原始探测数据进行转换,软件操作窗口见图4。

图4 CMS数据转化界面
通过导入测量的数据,输入现场测量的CMS扫描头支架上两个点的坐标参数,应用此软件把CMS测量的空区数据转化成DXF格式。应用转化后的DXF格式数据导入DIMINE软件中进行三维建模工作。
4.2 点云预处理
CMS三维激光扫描仪所采集的点云数据具有数据量大、无规律等特点,并且采集过程中由于反射率不均或存在灰尘等原因,造成了许多噪声点。有时扫描点云数据坐标与实际工程中所需的坐标之间存在差异,需要进行坐标转换。因此,需要对测量得到的点云数据进行预处理以期最大程度地还原采空区的真实面貌。
通过进行点云预处理,对点云扫描数据达到一个初始处理的效果,降低数据的噪声部分,同时实现了由扫描仪坐标系转换为工程实际需要的坐标系的效果,为后期建模所需数据准备、模型建立阶段奠定了基础[14]。
4.3 采空区三维模型构建
通过CMSPosProeessCMS软件把采空区的点云数据转换后生成的DXF文件是根据设定的探测抬升角度生成的一圈点,然后根据4个点生成一个四边形面,根据这些面联接成的体,最后把DXF文件的体导入DIMINE软件中生成三维的采空区模型。由于在DIMINE软件中的体由三角面片组成,所以在处理数据时,会使初期生成的采空区实体产生很多错误,如交叉三角形和无效边等。因此需要在DIMINE软件中修改出现的错误,然后建立采空区的准确模型。采空区三维建模步骤如下:
(1)进行数据转换和点云处理,然后把DXF文件直接导入DIMINE软件进行空区模型的三维构建,见图5。
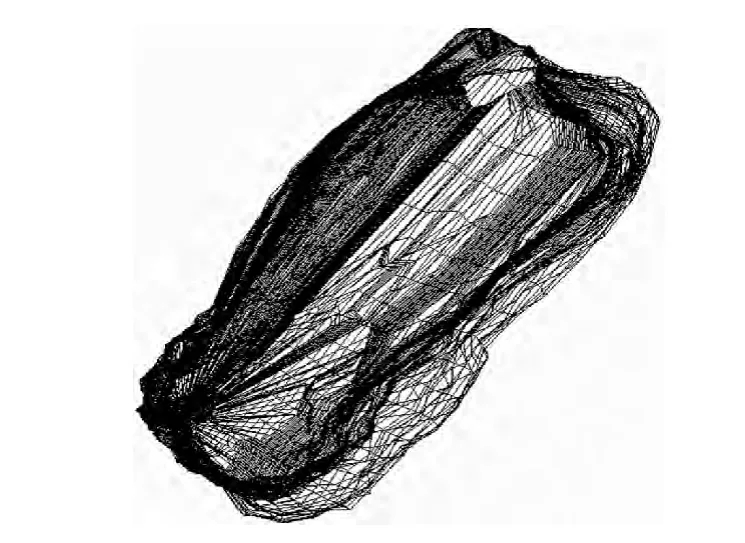
图5 预处理后的采空区模型
(2)人工处理特异部位和开口位置。在DIMINE软件中先把导入的四边形面合并成一个整体,然后提取实体的开口线;根据提取的开口线封闭成面,把面和实体合并,对合并后三维实体进行三角化,使四边线面转换为DIMIEN实体文件的三角形面,最后检验三维是否有错误。
(3)通过对转换为三角形面片实体的检验,CMS扫描的采空区一般都会存在问题,比如交叉三角形和无效边,根据检验结果处理相应问题后才能对空区分析和运算,见图6和图7。

图6 处理前的采空区模型

图7 经过处理的采空区模型
4.4 矿山采空区三维模型复合及其应用
在DIMINE软件中打开空区三维模型,将其与现有的矿山地表、开拓系统等三维模型复合,最终形成矿山详细的采空区分布图。见图8。通过矿山采空区三维模型的构建,可以直观地显示各中段空区的分布情况,也可以运用DIMINE软件中“实体切片”功能,得出每个采空区的暴露面积,分析采空区是否安全,见图9。

图8 矿山采空区分布图

图9 采空区暴露面积统计分布图
5 结论
(1)本文介绍了采空区探测研究现状、CMS基本原理和使用方法,总结了应用三维激光扫描技术对采空区进行建模的方法。
(2)CMS空区监测系统通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据,大大提高了采空区数据采集的安全性和效率,配合DIMINE、FLAC3D等三维数字软件,可为空区安全评价、治理及资源回采设计提供准确的数据依据和保障。
[1]王立磊.汤丹铜矿采空区的精密探测及其稳定性的分析研究[D].长沙:中南大学,2009.
[2]吴建功,林清援,高 锐.地球物理方法及在地质和找矿中的应用[M].北京:地质出版社,1988.
[3]Baker R L,Cull J P.Acquisition and Signal Processing of Ground-Penetrating Radar for Shallow ExPloration and Open-Pit Mining[J].Exploration Geophysics,1992,23(l-2):17-22.
[4]罗周全,刘晓明.采空区精密探测技术应用研究[J].矿业研究与开发,2006,11(增):87-90.
[5]Siggins A F.A Radar Investigation of Fracture in a granite outcrop[J].Exploration Geophysies,1990,21(l-2):105-110.
[6]Tumer G.Data Processing Techniques for the Locationo f One Dimensional Objects Using Ground Probing Radar[J].Exploration Geophysics,1989,20(3):379-382.
[7]赵国彦.金属矿隐覆采空区探测及其稳定性预测理论研究[D].长沙:中南大学,2010.
[8]倪新辉.地震勘探在煤矿水文地质勘探和水害防治中的应用.世纪之交煤矿地质学术论文集[C].西安:中国煤炭学会煤田地质专业委员会,中国地质学会矿井地质专业委员会,1999:362-363
[9]唐大荣.地面岩溶塌陷的高分辨地震勘查[J].物探与化探,1994,18(1):35-39.
[10]阎述,陈明生,单青生,等.二维自动地电阻率技术探测门头沟老窑[J].煤炭地质与勘探,1995,23(5):453-457.
[11]程久龙,潘冬明,李 伟,等.强电磁干扰区灾害性采空区探地雷达精细探测研究[J].煤炭学报,2010,35(2):227-231.
[12]王俊茹,张吉恒,许柏青.瞬变电磁法在高速公路采空区勘测中的应用[J].物探与化探,2007,31(4):358-364.
[13]马玉涛,彭 威.采空区三维激光扫描系统C-ALS及其在安庆铜矿的应用[J].有色金属(矿山部分),2013,65(3):1-3,12.
[14]任洪文,刘兆富,韩智尧等.三维激光扫描技术在测绘采空区中的应用[J].黄金科学技术,2013,3(6):64-68.
[15]郭崇光,李敬宇,刘 君.氡气测量在山西采空区探测中的应用[J].科技情报开发与经济,2004,14(1):180-181.