基于计算机视觉的停车位车辆存在性检测方法*
2014-12-14徐建闽林培群
叶 卿 徐建闽 林培群
(华南理工大学土木与交通学院 广州 510640)
0 引言
目前,国内各大城市汽车保有量的快速增长导致停车场资源日趋紧张,如何对停车场进行科学管理、提高其运行效率越来越引起管理人员的重视。目前大部分停车场管理系统只是对入场车辆的停车时间、计费进行管理,对停车位的管理尚缺乏有效的手段。停车位车辆存在性检测是停车位管理的前提,对停车场的资源统筹、人员配置,以及停车导引(可大幅减少停车场内的寻位绕行交通)具有重要的意义,因此如何判断某个停车位上是否有车辆停泊近年来得到了国内外工程技术领域的广泛关注[1]。
现有车辆存在性检测技术主要有:超声波、地感线圈、地磁、压力、红外、计算机视觉(视频)等[2]。除计算机视觉外,其他检测技术均需为每个车位配置1 个传感器,设备安装、维护工作量大,成本较高。视频监控是许多停车场的基本安防系统,如果能够直接利用监控系统的视频图像进行停车位车辆存在性检测[3-4],则可在不增加新硬件设备的情况下获得有价值的信息。但是,目前计算机视觉检测技术大部分采用背景差分、纹理分析等方法[5-6],受光照、阴影等因素的影响严重,在实际应用中检测准确率偏低。
1 总体思路
笔者提出1种基于计算机视觉的停车位车辆存在性检测方法,其基本内容如下:首先在停车场内的每个车位上绘制特定的辅助识别图案[7],这种图案具有各向同质性的特征以适应摄像机在各个角度的拍摄,在大部分光照、阴影的影响下具备图案特征不变性,且与一般车辆上绘制的图案具有显著差别。在此基础上采用计算机视觉技术对图像中各个车位对应的图块是否存在辅助识别图案进行检测,如果图案的特征存在,则判定该车位没有车辆停泊,否则该车位有车辆停泊。
2 停车位设置
2.1 图案形状设计
考虑停车场(尤其是地下停车场)光照(包括固定照明灯、车灯等)、阴影(包括车的阴影,工作人员的阴影等)等众多因素,辅助识别图案采用同心环组、各环带具有一定宽度、相邻环带间RGB色差显著的图案,其中黑白同心环组是彩色同心环组的特殊形式。如光照条件较好、摄像机成像后能准确分辨环间色差,可采用彩色的同心环组;如果光照条件较差、阴影干扰严重,可采用黑白相间的同心环组。彩色同心环组包含更多的信息量,黑白同心环组表达的信息量相对较少,但可靠性更高,见图1。
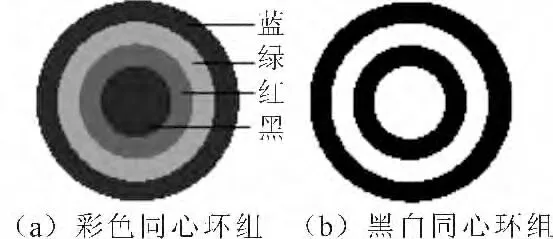
图1 同心环组示意图Fig.1 Concentric rings group
上述辅助识别图案的特征为:任意经过圆心的直线,出现左右对称、色彩或灰度变化过程一致的情况,见图2。这种色彩或灰度对称变化的特征即便在光照较弱、有阴影干扰的环境下仍具有较强的不变性。
如图2(b)中,如无遮挡,从左到右考察经过圆心的水平直线,直线上的像素则经历“暗—亮—暗—亮—暗—亮—暗”的灰度变化过程,除非有车辆停泊将图案遮挡,否则总能在图像中识别出该特征,这为车辆存在性检测提供了良好的基础。在具体实施中,辅助识别图案可通过刷漆(如采用地坪漆、车道线漆)等方式进行绘制,十分经济、简便。
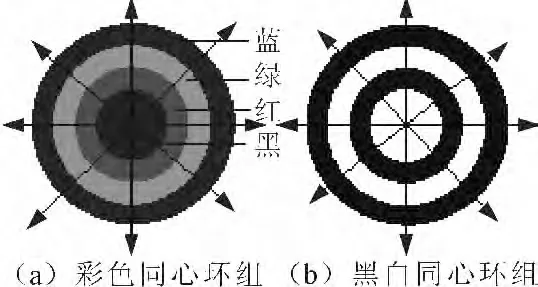
图2 经过同心环组圆心的直线示意图Fig.2 Straight crossing the center of concentric rings group
2.2 图案位置及大小
图案的位置一般设置在停车位中间,以车辆正常停泊时能将其全部或大部分覆盖为原则,其尺寸与摄像机分辨率、焦距、拍摄角度相关,一般以摄像机中能够清晰成像(要求每个同心环带经过摄像机成像后至少有3个像素的宽度)、图案不超出车位边线为原则。
在停车场进行辅助识别图案绘制,见图3,停车场局部在摄像机中的成像见图4。
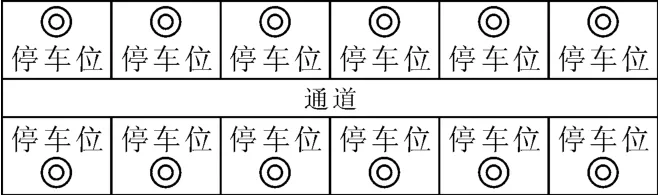
图3 停车位上的辅助识别图案Fig.3 Auxiliary recognition pattern on the parking spaces

图4 停车场局部在摄像机中的成像Fig.4 Parking partial image in the camera
3 图像检测算法
由于在摄像机成像之后,圆形可能变成不规则的类椭圆形,难以进行数学解析描述,因此采用多边形(由有限条线段组成)框定一定的图像区域,用以近似代表辅助识别图案的对应区域,多边形框定的范围即为图像检测区。考虑到多边形检测区本身也具有一定的检索难度,因此以包含多边形检测区的最小规则矩形(规则矩形各条边与x轴或y轴平行,方便进行逐行或逐列扫描)为图像检索范围,这种矩形称为多边形的外接矩形。多边形检测区、外接矩形见图5。

图5 多边形检测区和外接矩形示意图Fig.5 Polygon detection area and external rectangle
识别某像素是否在多边形上,一般有矢量法、面积法、水平/垂直交叉点数判别法等。对于本文而言,由于需要分析多边形检测区内每1个像素的色彩或灰度特征,因此如采用上述方法,则每个像素都需要调用1次以上算法过程,算法开销较大[8-9]。为了实现以上目标,需进行下面的定义和算法描述。
定义1。有限多边形A={I1,I2,…,In}。其中:Ii为 第i条线段。Ii的起止点为po(Ii),pd(Ii),而分别表示po(Ii)的横坐标和纵坐标。假如任何水平直线k与A的交点数量为0,1,2或无穷多个,则A为水平规则多边形,记AXR,相应的,如果k为垂直直线,则A为垂直规则多边形,记AYR。
显然凸多边形是水平规则多边形和垂直规则多边形的特例,而同心环组辅助识别图案在摄像机中的成像,可采用凸多边形进行近似标定。
在笛卡尔坐标系中,记A的外接矩阵为R(A),定义R(A)的左上角为po(R(A)),其坐标,长与高 分别为{1,2,…,n}。
定义2。记A的标记矩阵为M(A),定义M(A)的行数与列数分别为
i,j∈{1,2,…,n},矩阵元素的值域为{-1,1}。令M(A)与R(A)的像素一一对应,即M(A)的第1行与R(A)最上1行像素对应,M(A)的第1列与R(A)最左1行像素对应,以此类推。如M(A)对应像素在A上,则令其在M(A)上对应的元素取1,否则取-1。
若AXR,M(A)可通过以下算法获取。
1)令M(A)的每个元素都为-1。
2)自上而下按照行扫描的方式扫描R(A)对应每1行:
令min(X)=+∞,max(X)=-∞,分别考察A={I1,I2,…,In}每条线段与考察直线的关系。
1)如果某条线段Ii刚好在扫描线上,则如果,那么min(X),如 果 max(X)<,那 么 max(X)=
2)如果某条线段Ii与扫描线只有1个交点,其横坐标为Xc,则如果min(X)>Xc,那么min(X)=Xc,如果max(X)<Xc那么max(X)=Xc。
3)如果min(X)≤max(X)则,在M(A)中修正对应行,该行从第min(X)-(R(A))+1到max(X)-(R(A))+1个元素均设为1。
如AXR,则以上算法采用列扫描。
标记矩阵M(A)在进行实际检测之前可离线获得,此后除非摄像机拍摄画面变动,否则将保持不变,因此可以作为参数进行存储。标记矩阵的主要作用是记录检测区的范围,为后面的目标识别奠定基础。
4 图像识别算法
分别考察图像中各个检测多边形,每个检测多边形对应1个车位,图像识别算法如下:对于多边形Ai,令

式中:·表示位乘,即G(Ai)中的像素值与M(Ai)中对应的元素值进行代数积,运算后G(Ai)各像素值保持不变或取相反数。如果图像是24位真彩色,则以上计算过程需要对RGB三分量分别进行。
逐行扫描,将像素的色彩向量(或灰度)值离散为标准值。以一定的误差允许值进行近邻同类合并,具体来说先采用色彩(或灰度)空间的欧氏距离法进行聚类,再利用形如[A,*,B]的判决算子,消除2个大区间(取值为A或B)之间的小区间*。
逐行扫描,将每1行像素转化为1个字符串,此时每行像素可抽象为形如“3(A)4(B)2(C)…”的游程编码序列,其中“A”,“B”,“C”等为色彩向量(灰度)标准值,小括号外的数字代表在此处色彩向量(灰度)值相等的像素数,当按照水平方向排列图块时这些数字的和等于目标图像的宽度(也即多边形检测区外接矩形的宽度)。在此基础上匹配目标模式[10-11],如果找到目标模式的行数大于阈值,则认为目标存在,此时可以判定该车位没有停车,否则该车位有停车。
5 实例验证
选取某一停车场的2 个停车位进行实例验证,利用停车场现有的视频监控系统固定拍摄停车场的某个区域,见图6。

图6 停车场监控示意图Fig.6 Schematic diagram of parking monitoring
为了检测算法的通用性和鲁棒性,实验选取了摄像头1d时间内的不同光照条件下的车位图像进行处理,从检测结果可以看出,该算法可以排除环境光线变化对检测的影响,其准确率为98.12%。
图7和图8是停车场车位检测实验。停车位上采用了圆环形状的辅助识别图案作为参照背景,在实际应用时可采用刷漆的方式进行绘制。圆环外是外接正8边形,用以代替圆环区域,这样计算机能更容易检测到该区域。

图7 停车位上无车Fig.7 There is no car on the parking spaces

图8 停车位上有车Fig.8 There exists car on the parking spaces
6 结束语
笔者介绍的检测方法利用了停车位上的辅助识别图案,能够加快计算机识别背景的速度和准确率。传统检测方法是将整个停车场区域作为参考背景,存储大,而本方法只是存储车位区域的多边形,不仅存储小,而且也简化了算法。笔者所介绍的方法在地下停车场等光照环境比较恶劣的条件下具有良好的应用前景,特别是大型停车场,需要处理的数据量较大,本方法能利用优化算法降低系统的计算压力,提高停车场工作效率。
[1]Lee C H,Wen M G,Han C C,et al.An automatic monitoring approach for unsupervised parking lots in outdoors[C]∥39th Annual International Carnahan Conference on Security Technology,Cas palmos,spain,IEEE,2005:271-274.
[2]彭春华,刘建业,刘岳峰,等.车辆检测传感器综述[J].传感器与微系统,2007,26(6):4-8.Peng Chunhua,Liu Jianye,Liu Yuefeng,et al.Review of vehicle detection sensors[J].Transducer and Microsystem Technologies,2007,26(6):4-8.(in Chinese).
[3]李宇成,严娟莉,王目树,等.利用视频图像检测车位状态的方法[J].计算机工程与设计,2012,33(1):282-286.Li Yucheng,Yan Juanli,Wang Mushu et al.Approach for parking spaces detection base on vedio images[J].Computer Engineering and Design,2012,33(1):282-286.(in Chinese).
[4]罗小巧,姜 龙,瞿少成,等.基于视频的停车场车位监控算法研究[J].电子测量技术,2012,35(2):33-37.Luo Xiaoqiao,Jiang Long,Qu Shaocheng,et al.Research on viedo-based monitoring algorithm of parking spaces[J].Electronic Measurement Technology,2012,35(2):33-37.(in Chinese).
[5]黄战华,马 铭,蔡怀宇,等.一种基于视频的停车场车位监控算法[J].科学技术与工 程,2007,17(7):4511-4514.Huang Zhanhua,Ma Ming,Cai Huaiyu,et al.Algorithm for parking spaces monitoring based on vedio[J].Science Technology and Engineering,2007,17(7):4511-4514.(in Chinese).
[6]蒋大林,邓红丽,平 彧,等.基于视频图像的多特征车位检测算法[J].北京工业大学学报,2008,34(2):137-140.Jiang Dalin,Deng Hongli,Ping Yu,et al.Parking cell detection algorithm of multiple characteristic based on video image[J].Journal of Beijing University of Technology,2008,34(2):137-140.(in Chinese).
[7]孟 焱,孙 军,汤一平.基于机器视觉的停车位检测技术的研究[J].计算机测量与控制,2012,20(3):638-641.Meng Yan,Sun Jun,Tang Yiping.Research on parking state detection method based on machine vision[J].Computer Measurement and Control,2012,20(3):638-641.(in Chinese).
[8]刘 薇,朱 虹,杨向波.停车场视频监视系统中的阴影检测方法[J].机械科学与技术,2008,27(5):673-676.Liu Wei,Zhu Hong,Yang Xiangbo.Shadow detection method for vedio surveillance systems in a park-ing lot[J].Mechanical Science and Technology,2008,27(5):673-676.(in Chinese).
[9]林培群,徐建闽,卞建勇.一种用于交通信息采集的图像背景快速估计方法[J].交通信息与安全,2009,27(3):138-141.Lin Peiqun,Xu Jianmin,Bian Jianyong.A fast Approach to image background estimation for traffic information collection[J].Journal of Transport Information and Safety,2009,27(3):138-141.(in Chinese).
[10]Theodoridis S.Pattern recognition[M].Beijing:Publishing House of Electronics Industry,2010.
[11]范立南,韩晓微,张广渊.图像处理与模式识别[M].北京:科学出版社,2007.Fan Linan,Han Xiaowei,Zhang Guangyuan.Image processing and pattern recognition[M].Beijing:Science Press,2007.(in Chinese)