多车道复杂环境下驾驶倾向性状态辨识*
2014-12-14王克刚王晓原王晓龙张敬磊
王克刚 王 健 王晓原▲ 王晓龙 张敬磊 孙 亮
(1.山东理工大学交通与车辆工程学院 山东 淄博 255091;2.山东理工大学理学院 山东 淄博 255091)
0 引言
汽车作为1种交通工具,给人们出行带来了极大方便的同时也带来了交通安全问题。自动驾驶和辅助驾驶是解决交通安全问题,提高行车安全的积极有效手段。驾驶人生理-心理特性对交通安全的影响主要表现为其驾驶倾向性[1],汽车驾驶倾向性是汽车行驶过程中操控者情感偏好等特征的动态测度,常常伴随车辆编组复杂关系的时变性而发生转移,并引导驾驶人意图的演化,笔者将其类型可分为:保守型、普通保守型、普通型、普通激进型、激进型。以往研究多集中于从相对静态和宏观角度出发的驾驶人心理特性测量及其对交通安全影响,而关系汽车主动安全方面的,对驾驶人情感状态进行微观、动态测度和计算的研究较少。Orit Taubman[2]研究了积极情感对鲁莽驾驶行为意愿的影响,研究发现,令人放松的积极情绪会使驾驶人不愿意进行冒险驾驶。Michelle Chana等[3]通过使用中性、消极和积极的词语刺激驾驶人并观察驾驶人行车状况,研究了情绪干扰对驾驶人行车的影响,研究结果表明,相对于中性词语,情感词会刺激驾驶人较高速度的行驶,且积极词语对驾驶人速度的影响更持久。Martin Schmidt-Daffy[4]研究了恐惧和焦虑程度对驾驶行为的影响,结果表明恐惧和焦虑程度增加时,驾驶人将选择较小的车速行驶以保证行车安全。Mark S.Horswill等[5]研究了驾驶人年龄,特别是老年驾驶人对驾驶行为的影响,针对老年驾驶人易高估或错估自身驾驶能力这一现象,对老年驾驶人提出相关建议以减少交通事故的发生。吴超仲等[6]研究了驾驶人愤怒情绪下的驾驶行为特征,识别了愤怒驾驶状态,研究了愤怒情绪对驾驶人生理心理的影响,探讨了愤怒驾驶对交通安全的影响。严利鑫等[7]分析了驾驶人性别、年龄、驾龄等自身因素对驾驶愤怒情绪产生的影响,实验结果表明,男性驾驶人在驾驶过程中产生愤怒情绪的概率要高于女性驾驶人;年长驾驶人出现驾驶愤怒情绪的概率显著高于年青驾驶人;而随着驾龄的增加驾驶人平均愤怒等级逐渐降低。为了研究车辆跟驰状态下不同驾驶人的驾驶倾向性特征,王晓原等采用神经网络分类器以及误差反向传播算法,确定了车辆跟驰下作为神经网络输入层的微观动态信息(车辆运动状态、驾驶人操作行为、驾驶环境等)与驾驶人倾向性类型隐含层之间的连接权重,并运用离散粒子群算法,对驾驶倾向性的特征数据进行提取[8]。此外,应用最优控制理论,通过分析驾驶人对信息的感知和对操作的判断决策,建立车辆跟驰模型,利用实验得到的各倾向性类型驾驶人实验数据,进行驾驶倾向性推理效果的验证[9]。为了探索2车道场景下驾驶倾向性与车辆编组状态之间的耦合作用机制,王晓原等运用遗传模拟退火算法,提取了2车道场景不同车辆编组状态下驾驶倾向性特征向量[10];以此为基础,用动态贝叶斯网络建立时变环境下驾驶倾向性动态辨识模型[11];此外,通过对2车道场景下各车辆编组状态转移时驾驶倾向性的转移规律进行统计分析,揭示了环境嬗变情况下,汽车驾驶倾向性转移机制[12]。然而,3车道情况下的车辆编组关系的状态更加复杂,且此场景下驾驶人倾向性的辨识模型和转移机制会与2车道场景下存在差异,因此,本文以3车道场景为例,重点考虑环境因素中直接影响驾驶人情感的态势因素,设计生理心理测试和实车实验,采集不同态势下驾驶倾向性特征数据,利用动态贝叶斯网络建立适应环境演变的驾驶倾向性识别模型。结果表明,本文相关实验的设计方案以及所构建的辨识模型合理可行,能够实现多车道环境下驾驶人倾向性的动态辨识。
1 交通态势复杂性分析
交通态势由动态交通实体构成,对驾驶人行为起决定性影响。交通态势可分为3种情况,分别为目标车位于中间车道、左车道、右车道,相应的车辆编组关系也可划分3种情况:目标车位于中间车道、左车道、右车道。限于篇幅,本文以目标车位于中间车道为例,且仅列出其中部分车辆编组关系见图1与图2。
可将上述车辆编组关系进一步简化,将左前车、左车、左后车、右前车、右车和右后车6类干扰区内的车辆划分为左侧干扰车和右侧干扰车2大类,当目标车左侧或者右侧有多于1辆的限制车时,若2车之间距离满足目标车插车所需要的最小可插车间隙时,假定只有空间距离(沿目标车速度方向与目标车之间的距离)最近的车辆对目标车构成限制;若2车之间距离不满足目标车插车所需要的最小可插车间隙时,将2车合并为-辆干扰车。据此可将复杂的车辆编组关系约简为如图3所示的结果(限于篇幅仅列出目标车位于中间车道约简示意图)。
根据上述约简方法,3车道情况下,约简后的车辆编组关系为32种。由图3可知,目标车位于中间车道车辆编组关系8 种,分别用T1~T8表示。笔者将以目标车位于中间车道为例,对简化后的8种车辆编组关系分别进行驾驶倾向性动态特征提取。运用粗糙集理论,进行基于最小信息熵的连续属性离散化和基于启发式贪心算法的属性约简,提取不同车辆编组状态下驾驶倾向性类型特征向量(限于篇幅不再赘述),8种不同车辆编组关系的驾驶倾向性特征见表1。

图1 目标车周围存在3辆干扰车示意图Fig.1 Target vehicle surrounded by three interferences

图2 目标车周围存在4辆干扰车示意图Fig.2 Target vehicle surrounded by four interferences
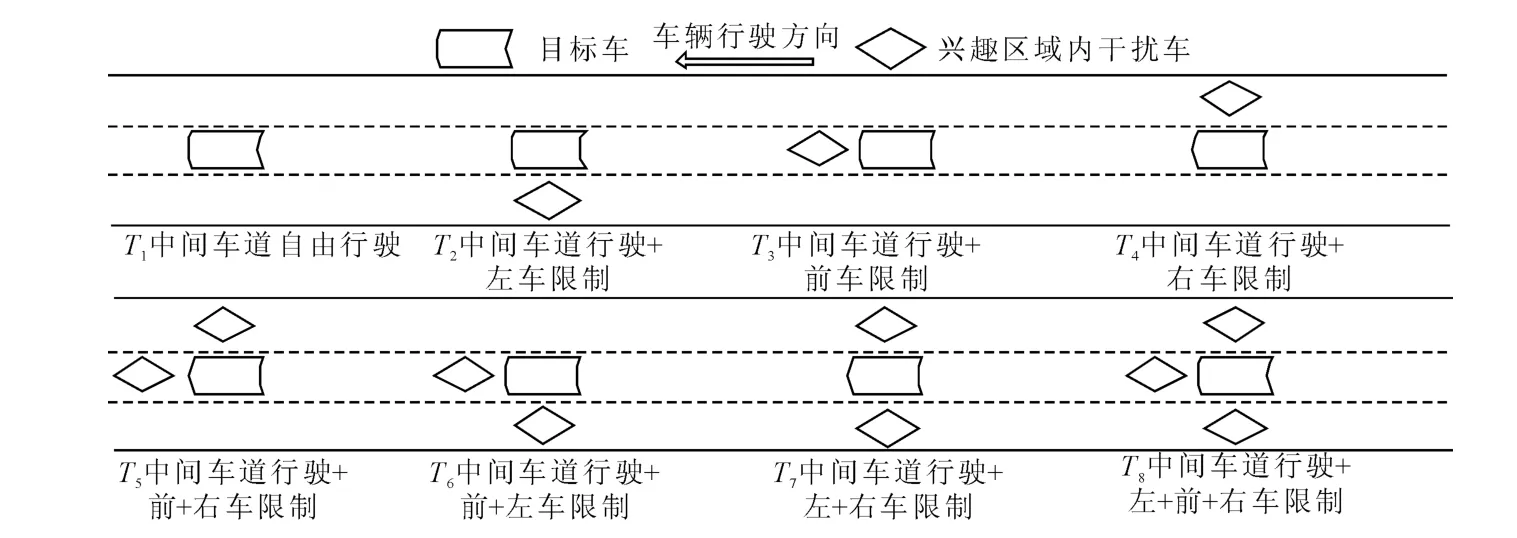
图3 目标车位于中间车道时车辆编组关系简化示意图Fig.3 Simplification of vehicle groups when target vehicle locates in the middle lane

表1 不同编组关系的驾驶倾向性特征Tab.1 Driver’s propensity characteristics of different vehicle groups
2 汽车驾驶倾向性动态辨识模型
2.1 动态贝叶斯网络
动态贝叶斯网络也称为时间贝叶斯网络,是随时间发展的静态贝叶斯网络。每个时间对应1个结构和参数相同的静态贝叶斯网络;相邻两时间片间由弧连接,反应相邻时间片变量之间的依赖关系[13]。
图4为一简单的含有3个时间片的动态贝叶斯网络,A1,A2和A3为隐藏节点,B1,B2和B3为观察节点,每个节点为1变量,每个变量可以有多个状态,节点之间以条件概率进行更新。动态贝叶斯网络推理的基础是贝叶斯公式

图4 简单动态贝叶斯网络图Fig.4 Simple dynamic Bayesian network
具有n个隐藏节点和m个观测节点的静态贝叶斯网络,其推理的本质是计算


式中:xi为Xi的1个取值状态;Pare(xi)为表示状态xi的父节点,Pare(Xi)为表示状态Xi的父节点集合,Pare(Yj)为Yj的父节点集合;分母求和∑下的x1,x2,…,xn为隐藏节点的组合状态,是对观测变量组合状态和隐藏变量组合状态的联合分布求和,实际是计算确定的观测变量组合状态的分布。
静态贝叶斯网络随时间发展就可以得到T个时间片组成的动态贝叶斯网络,每个时间片有n个隐藏节点和m个可观测节点,则其网络的推理可以表示为

式中:xij为Xij的1个取值状态;i为第i个时间片;j为在第i个时间片内的第j个隐藏节点;yij为观测变量Yij的取值;Pare(Yij)为yij的父节点集合;Yij0为第i个时间片内第j个观测节点Yij的观测状态;P(Yij0=yij)是Yij的连续观测值属于状态yij的隶属度。
2.2 实验设计
2.2.1 实验设备
城市道路环境下,运用动态人车环境信息采集系统(见图5)采集实验数据并处理,提取驾驶倾向性动态特征数据。此外,所用软件有SPSS17.0,会声会影10.0等。

图5 动态人车环境信息采集系统组成Fig.5 Dynamic driver-vehicle-environment information acquisition systems
2.2.2 实验条件及对象
实验选取天气晴朗、路面干燥的实验条件,时间是正常工作日的上午08:30~10:30时,道路交通状况繁忙,但未达到拥堵状态,交通流量约为2 500辆/h。实验样本容量为50 名,男性驾驶人41名,女性驾驶人9名,年龄分布在27~58岁之间,平均年龄34.6周岁,驾龄分布在3~22年之间,平均驾龄8.16年。
2.2.3 实验数据
实验获取行驶过程中人车环境动态信息后,需要将各数据进行状态划分,计算不同状态的隶属度,以用于驾驶倾向性动态辨识,状态划分和隶属度计算模型见2.3节。
2.3 基于动态贝叶斯网络的驾驶倾向性辨识
车辆编组关系辨识的依据是不同空间位置车辆编组关系以及周围干扰车辆沿速度方向与目标车的距离。通过大量实验发现,当目标车与相邻车道上其它车辆沿目标车速度方向上的间距d左或d右(d左为目标车与左车道上行驶车辆沿目标车速度方向的空间直线距离,d右为目标车与右车道上行驶车辆沿目标车速度方向的空间直线距离)小于(或等于)某一门限值时,也才会对目标车造成影响。对不同驾驶人大量实验数据统计表明[10-11],d左区间为[-65 m,60 m],d右区间为[-50m,55 m],影响驾驶人对区间选择的诸多因素,尚需进一步研究。为了简化计算模型,目标车位于中间车道车辆编组关系辨识模型如图6所示,基于动态贝叶斯网络[14]辨识模型流程见图7。
动态贝叶斯网络总模型见图8。
图8中包含了不同车辆编组关系下的所有特征数据,在辨识过程中会根据不同的环境选择与之对应的特征数据进行计算。动态贝叶斯网络模型中变量状态集合如下。
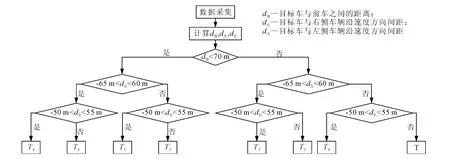
图6 目标车位于中间车道车辆编组关系辨识模型Fig.6 Vehicle group identification model

图7 动态贝叶斯网络辨识流程图Fig.7 Recognition flow chart based on dynamic Bayesian networks

图8 动态贝叶斯网络模型Fig.8 Dynamic Bayesian network model
倾向性=(保守型,普通保守型,普通型,普通激进型,激进型);目标车速度(小,中,大);目标车加速度(小,中,大);横向车间距=(大,中,小);相对速度=(低,中,高);相对加速度=(小,中,大);减速频率=(高,中,低);加速频率=(高,中,低);操作反应时间=(慢,中,快);保守换道频率=(高,中,低);冒险换道频率=(低,中,高);加速力度=(小,中,大);减速力度=(小,中,大)。
变量状态都是模糊集合,设样本数据x含有N个特征数据,用pi表示样本数据中该特征分量隶属于特征i的可能性。隶属度(概率)计算公式如下。

式中为已知样本数据的均值;ai为特征数据的观测值;aimin和aimax为观测值中的最小和最大值。
1)前期参数设定。条件概率矩阵反映的是领域专家对于网络中关联节点之间因果关系的看法,是1种专家知识。根据专家经验,T3车辆编组关系下,稳定行驶时,驾驶倾向性特征数据有前后车间距、相对速度、减速频率、加速频率、操作反应时间、保守换道频率和冒险换道频率,由此推理出驾驶人倾向性类型的规则采用概率方式;初期条件概率根据专家经验获取,数据库数据达到一定容量之后,采用数据库存储数据进行概率计算。
根据上述的推理规则,可得到驾驶人自身特性条件概率矩阵,值得注意的是,条件概率矩阵是1种专家知识,难免存在一定的主观性,可以采用样本数据反复调试的方法,对矩阵数据进行适度调整,以提高评估结果的可信性。
2)后期参数设定。前期数据库积累数据达到一定容量以后,建立驾驶倾向性特征数据库。数据按照驾驶人心理测试结果划分为五大类:保守型,普通保守型,普通型,普通激进型和激进型;每1类数据中是各个提取出来的相应的特征数据和前期根据特征数据获得的驾驶倾向性识别结果。在相同的心理测试结果下,对数据库中的数据按照倾向性识别结果进行统计分析,确定不同交通环境下的不同倾向性(识别)类型中各个特征数据在不同状态下所占的比例,以此来确定动态贝叶斯网络中的各个条件概率。
2.4 模型验证
辨识模型分为2部分,第1部分采用专家经验数据进行驾驶倾向性辨识,第2部分采用统计分析数据进行驾驶倾向性辨识。在没有其它证据情况下,初始状态以初期驾驶倾向性的标定结果(通过生理心理测试等驾驶倾向性预判方法[15]得到)为依据,见表2。
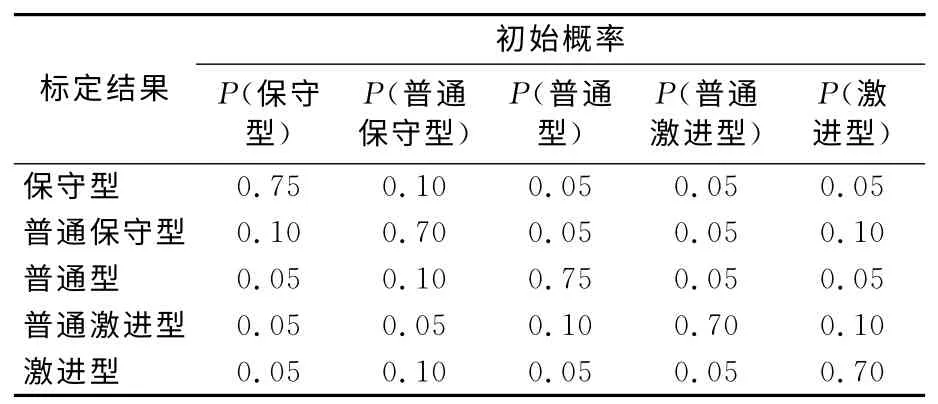
表2 不同倾向性的初始概率Tab.2 Nitial probability of different driver’s propensities
对于不同初值的驾驶人分别以上述的几种情况为合理起点,收集不同节点上的证据(假设证据之间相互独立)。笔者对多位驾驶人分别进行了实验采集到大量的特征数据和识别结果,选取5种典型驾驶倾向性(初期标定)驾驶人T3态势下的数据进行详述。
表3和表4为驾驶人驾驶倾向性的识别结果(包括前期专家概率和后期统计概率)。
同样的方法验证不同车辆编组关系下汽车驾驶倾向性辨识准确率,所得结果见图9。

表3 驾驶倾向性识别结果(初期专家概率)Tab.3 Recognition and identification result of driver’s propensity(initial expert probability)

图9 驾驶人在不同态势下倾向性辨识准确率Fig.9 Identification accuracies of driver’s propensity in different situations

表4 驾驶倾向性识别结果(后期统计概率)Tab.4 Recognition and identification results of driver’s propensity(statistical probability)
仿真验证结果如图10所示,模拟1为仿真过程中未动态考量驾驶倾向性的情况,模拟2为考虑驾驶倾向性时变规律并实时用于仿真过程的情况。验证结果表明,考虑驾驶倾向性差异的微观仿真模型能够更精确的模拟驾驶人行为,适用度更高,笔者所建驾驶倾向性动态辨识模型是科学合理的。

图10 速度、加速度以及车间距仿真验证结果Fig.10 Verification results of relative velocity,relative acceleration and relative displacement
3 结束语
驾驶倾向性反映了驾驶人在车辆操作和运动过程中表现出的心理情感状态,随环境嬗变而演化,又深刻影响着驾驶人对环境信息的认知及处理过程,因此,其状态的实时辨识是实现汽车辅助驾驶及安全主动预警的关键。本文在深入分析3车道环境下驾驶人行为、车辆状态与交通环境等信息基础上,通过非接触测量获取驾驶人生理心理特征、交通环境和车辆运动状态等动态数据,利用动态贝叶斯网络建立时变环境下驾驶倾向性动态辨识模型。实验验证表明,本文所建模型能够适应多车道情况下驾驶人倾向性类型的动态识别,为以人为中心的个性化汽车主动安全系统的实现提供理论基础。但是由于实车实验难度较大,所以在本研究中所涉及的样本量较小,有待于进一步的充实完善。同时需要指出的是,后续研究可在实验方法和实验手段允许的情况下,全面采集驾驶人行驶过程中心电、肌电、脑电、血压、脉搏、肤表温度、眼动规律、掌心压力和湿度等(在消除或者尽可能减弱生理采集设备给驾驶人带来侵入性的前提下)动态数据,并与车辆运动特征和环境特征相结合,从而进一步诠释汽车驾驶倾向性。
[1]冯雪芹,房春泉.驾驶员特性评价指标聚类分析[J].黑龙江交通科技,2007(11):161-163.Feng Xueqin,Fang Chunquan.Cluster analysis of driver characteristics evaluating indicator[J].Communications Science and Technology Heilongjiang,2007,28(11):161-163.(in Chinese).
[2]Taubman-Ben-Ari Orit.The effects of positive emotion priming on self-reported reckless driving[J].Accident Analysis &Prevention,2011,45(2):718-725.
[3]Chana Michelle,Singhal Anthony.The emotional side of cognitive distraction:Implications for road safety[J].Accident Analysis and Prevention,2013,50(1):147-154.
[4]Schmidt-Daffy Martin.Fear and anxiety while driving:Differential impact of task demands,speed and motivation[J].Transportation Research Part F:Traffic Psychology and Behaviour,2013,16(9):14-28.
[5]Horswill Mark S,Sullivan Karen,Lurie-Beck Janine K,et al.How realistic are older drivers’ratings of their driving ability?[J].Accident Analysis and Prevention,2013,50(1):130-137.
[6]吴超仲,雷 虎.汽车驾驶愤怒情绪研究现状与展望[J].中国安全科学学报,2010,20(7):3-8.Wu Chaozhong,Lei Hu.Review on the study of motorists’driving anger[J].China Safety Science Journal(CSSJ),2010,20(7):3-8.(in Chinese).
[7]严利鑫,吴超仲,高 嵩,等.驾驶人个体因素对驾驶愤怒情绪影响关系研究[J].交通信息与安全,2013,31(6):119-124.Yan Lixin,Wu Chaozhong,Gao Song,et al.Relationship between driver’s temperament and driving anger[J].Journal of Transport Information and Safety,2013,31(6):119-124.(in Chinese).
[8]Wang Xiaoyuan,Zhang Jinglei,Liu Jin,et al.Extraction of the Dynamic Vehicle Driver’s Tendency Feature Based on Car-following[C]∥Proceedings of the 12th COTA International Conference of Transportation Professionals(CICTP 2012),Beijing:CICTP,2012:2061-2071.
[9]Wang Xiaoyuan,Zhang Jinglei.Extraction and recognition methods of vehicle driving propensity feature based on driver-vehicle-environment dynamic data under car following[J].International Journal of Computational Intelligence Systems,2011,4(6):1269-1281.
[10]Wang Xiaoyuan,Zhang Jinglei,Ban Xuegang,et al.Dynamic feature extraction method of driver’s propensity under complicated vehicle group[J].Advances in Mechanical Engineering:Electronic Edition,2013,2013(3):1-10.
[11]Wang Xiaoyuan,Liu Jin,Zhang Jinglei.Dynamic recognition model of driver’s propensity under multilane traffic environments[J].Discrete Dynamics in Nature and Society:Electronic Edition,2012,2012(1):1-15.
[12]Wang Xiaoyuan,Zhang Jinglei,Ban Xuegang,et al.Study on transformation mechanism of driver’s propensity under two-lane conditions[J].Applied Mechanics and Materials,Information Technology Applications in Industry II Part 3,2013,411/414(4):1191-1198.
[13]周忠宝,马超群,周经伦,等.基于动态贝叶斯网络的动态故障树分析[J].系统工程理论与实践,2008,28(2):35-42.Zhou Zhongbao,Ma Chaoqun,Zhou Jinglun,et al.Dynamic fault tree analysis based on dynamic Bayesian networks[J].Systems Engineering-Theory &Practice,2008,28(2):35-42.(in Chinese).
[14]高 嵩,潘 泉,李智军,等.基于动态贝叶斯网络推理的运动目标状态最优估计[J].探测与控制学报,2007,29(4):74-76.Gao Song,Pan Quan,Li Zhijun,et al.Optimal state estimation of moving targets based on DBN[J].Journal of Detection &Control,2007,29(4):74-76.(in Chinese).
[15]Zhang Jinglei,Wang Xiaoyuan,Ban Xuegang,et al.Prediction method of driver’s propensity adapted to driver’s dynamic feature extraction of affection[J].Advances in Mechanical Engineering(Electronic Edition).2013,2013(5):1-7.
