专业及非专业驾驶人跟驰安全特性评价*
2014-12-14李亚平杨海飞
陆 建 李亚平 杨海飞
(1.东南大学城市智能交通江苏省重点实验室 南京 210096;2.现代城市交通技术江苏高校协同创新中心 南京 210096)
0 引言
随着我国机动化进程的加快,个体机动车保有量不断增加,驾驶人数量迅速增长,大量驾驶技能不熟练、驾驶心理素质较差、与车、路、环境之间的适应及协调能力较弱的非专业驾驶人上路行驶,使驾驶人群体内部差异逐渐凸显,对道路交通安全产生较大影响[1]。根据国内外相关研究统计,大约90%的交通事故都与驾驶人驾驶行为有关。驾驶行为是驾驶人在道路交通环境中,通过对周围信息的处理做出的对应的操纵车辆的行为,主要由跟驰行为、换道行为及间隙接受行为构成[2]。其中跟驰行为是指在行驶过程中受其所在车道内相邻前车制约而表现出的驾驶行为。当前车制动减速,后车跟驰距离较小不足以做出及时反应以完成制动措施时易发生追尾事故。对驾驶人跟驰安全特性进行评价,可为驾驶安全管理与教育提供数据支撑和理论依据,对降低道路追尾事故风险提高驾驶安全性具有显著意义。
目前国外部分学者在采集跟驰行为数据和驾驶特性问卷调查的基础上,通过跟驰距离[3-6]、车头时距[7]、反应时间[8]等指标分析了不同驾驶人跟驰行为中感知、判断及操作特性的差异性,研究认为不同地区、不同年龄、性别及驾龄的驾驶人跟驰特性对道路交通安全的影响程度不同。国内对驾驶人行为的研究主要是借助心理学的实验法和测验法对不同驾驶人的危险感知能力[9-10]、行车速度[11]等进行分析,部分学者根据所采集实验数据研究了不同驾驶人跟驰行为中车头时距的分布[12-14]。
国内外目前关于驾驶人跟驰行为安全性与差异性的定量研究较少,且数据主要来源于问卷调查或室内模拟试验等方式。鉴于此,笔者将通过采集真实道路交通环境下专业及非专业驾驶人的跟驰行为特性数据,基于碰撞时间TTC[15](time to collision)及其拓展指标TET(time exposedTTC),TIT(time integratedTTC)[16]等安全指标,对专业及非专业驾驶人的跟驰安全特性进行评价。
1 实验设计
1.1 实验设备
实验设备主要包括车载激光测速测距一体化系统1套(车载激光测距仪1台、GPS 1个、摄像头1个)、笔记本电脑1台。
实验仪器安装和实验过程见图1。

图1 实验仪器安装和实验过程图Fig.1 Equipment and the experiment process
1.2 实验对象及车辆
选取16名非专业驾驶人和10名专业驾驶人为实验对象,受试驾驶人的基本情况见表1。约80%的受试者为男性,非专业驾驶人职业涵盖教师,工程师和学生多个领域,专业驾驶人主要是出租车司机。
实验车为福特福克斯自动挡小汽车,排量为1.8L,车身长度为4.48m,宽度为1.84m,此车型是目前道路上比较常见的车型。

表1 受试驾驶人基本情况Tab.1 Basic information of all subjects
1.3 数据采集
实验地点为南京城市快速路和主干道,实验在天气状况良好、无大风大雨、光线充足的白天进行,时间为08:00~11:00时和13:00~18:00时,覆盖平峰和高峰时段。在实验前首先对受试驾驶人进行简单培训,说明本次实验的要求、实验路线等,使受试驾驶人对实验有一定的了解,然后让每个受试驾驶人驾驶实验车行驶15 min以适应实验车的运行性能,之后再进行正式实验。在正式实验中,每个受试驾驶人大约测试45 min,为了获得较高精度的实验数据,利用车载激光测距仪测定跟驰距离的采样周期为0.1s/次,GPS确定前车位置的采样周期为1s/次。
通过实验可得到的数据主要包括实验车行驶轨迹与跟驰距离,进而可以推算得到实验车与引导车的行驶速度、加速度等数据。
2 实验结果分析
笔者利用碰撞时间TTC,TET,TTC以及TIT等安全指标对2 类驾驶人(专业与非专业)的跟驰安全特性进行分析。
2.1 TTC 频率分布统计
在跟驰过程中,当后车在t时刻发现其车速大于前车且2车间距逐渐较小时,若不采取任何规避措施2车将在t'时刻相撞,t到t'的时间间隔即为t时刻碰撞时间TTC,该值不包括驾驶人的反应时间。其计算公式为

式中:TTCi为第i辆车追尾前车的碰撞时间,s;xi-1(t)和xi(t)分别为t时刻前、后车的位置;vi(t)和vi-1(t)分别为t时刻前、后车的速度,m/s;li-1为前车的车长。
根据实测的车辆位置、车速,取前车平均车长为4.5m,利用式(1)可以计算出受试驾驶人在其测试时间内各个时刻的TTC值。当TTC值大于20s时,驾驶人有足够的时间做出反应并完成制动措施,避免碰撞冲突[17],因此在进行TTC频率分布统计分析时选取TTC值的统计区间为[0,20s],按照式(2)对所有受试驾驶人TTC值进行统计,得到TTC频率分布统计图见图2。

图2 TTC 频率分布统计Fig.2 TTCvalue frequency distribution
由图2可见,专业驾驶人TTC值在[0,4s]的比例明显大于非专业驾驶人,而在[10,20s]的比例低于非专业驾驶人。TTC频率分布的统计结果表明,在跟驰过程中专业驾驶人保持较小碰撞时间的比例比非专业驾驶人高。从驾驶人心理角度分析,该结果表明非专业驾驶人在跟驰过程中相对保守和谨慎,专业驾驶人由于驾驶技能较为娴熟而倾向于保持较小的碰撞时间。这与国外学者van Winsum 的研究结论[18]相一致,他认为受驾驶技能限制,非专业驾驶人对引导车行驶状态改变的敏感程度较低。为弥补这一缺陷,非专业驾驶人倾向保持较大的跟驰距离(或碰撞时间)。
2.2 基于TET 及TIT 的实验结果分析
TET及TIT是基于TTC和TTC安全临界值TTC*拓展得到的安全评价指标,可统计一定时段内车辆的跟驰安全水平。若驾驶人保持的TTC值小于给定的安全临界水平TTC*,则该驾驶人的行驶状态处于非安全状态,TET是指一定时段内驾驶人处于非安全状态的持续时间之和。其计算公式如下。

式中:TETk为第k个驾驶人受测时间段内的TET值,s;T为 第k个驾驶人受测时间段内TTC的总个数;τ=0.1s为采样周期。
TET值越小则驾驶人的跟驰安全水平越高,但仅根据TET值可能对跟驰安全状况产生误判。例如若在[t1,t2]和[t3,t4]时段内TET值相等,但[t1,t2]时段内所有TTC值均小于0.5s,而[t3,t4]时段内TTC值均大于2s。显然由于[t1,t2]时段内TTC值较小,比[t3,t4]时段发生碰撞冲突的概率更高,此时仅仅依据TET指标难以准确评价2个时段的跟驰安全水平。TIT指标弥补了这一不足,其值是对所有小于安全临界值TTC*的TTC值在统计时段内进行积分(累加),计算公式如下。

式中:TITk为第k个驾驶人受测时间段内的TIT值,s2;N为第k个驾驶人受测时间段 内由所有小于TTC*的TTC构成的区段数。
由于TTC值表征了在时间间隔τ下不同离散时刻的碰撞时间,因此TIT可按式(5)进行计算:

以某一驾驶人为例统计其TTC值,见图3,若取TTC*=3s,按照式(3)和式(5)计算,则有

在确定TTC*之后可计算出各个驾驶人受测时间内的TET及TIT值。由于各个驾驶人受测时间不同,为使不同驾驶人TET及TIT值具有可比性,应计算单位时间内驾驶人的TET及TIT百分比,计算公式如下。
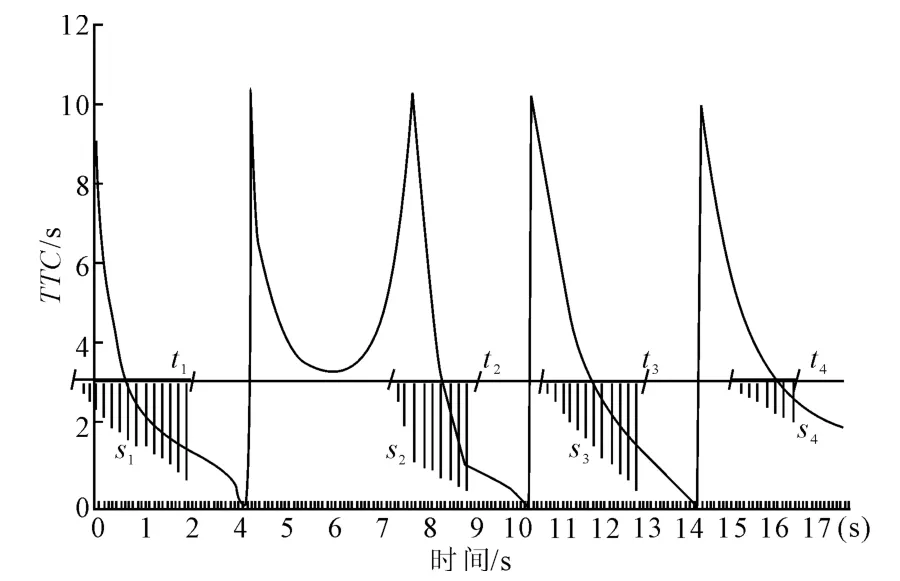
图3 TET及TIT 计算示意图Fig.3 Calculation schematic diagram of TETand TITindicator

选取安全临界值TTC*是利用TET和TIT指标进行数据分析的前提,以往研究一般结合研究目的选取不同的TTC*值,如文献[19]中以2s作为行驶安全的界定标准,文献[17]中取TTC*=4s界定驾驶人行驶过程中的危险情况,TTC*建议取值的范围在1s和4s之间。因此本文分别取TTC*=1,2,3,4四种情况对专业及非专业驾驶人的跟驰安全特性进行分析。在计算不同TTC*对应的和的基础上,求出不同TTC*下专业及非专业驾驶人单位时间内TET及TIT平均百分比和,计算结果见表2。
表2 及计算结果Tab.2 Calculation results of

表2 及计算结果Tab.2 Calculation results of
对比专业与非专业驾驶人的及值,见图4。

图4 专业及非专业驾驶人 及 对比图Fig.4 Comparison of andwith different threshold values.
由图4可见,在取TTC*=1,2,3,4四种情况下,均存在同一规律:专业驾驶人单位时间内TET及TIT平均百分比大于非专业驾驶员。这也表明在跟驰过程中非专业驾驶人更倾向于保持较长的时间间隔。
3 结束语
笔者应用车载激光测速测距一体化系统采集了不同驾驶人城市道路上的跟驰行为特性数据。基于碰撞时间TTC及其拓展指标TET,TIT统计了受测专业及非专业驾驶人在受测时段内的TTC频率分布与单位时间内的TET及TIT平均百分比,从而对比分析了专业及非专业驾驶人的跟驰安全特性。结果表明,专业驾驶人保持较低TTC的比例以及单位时间内TET与TIT的平均百分比均大于非专业驾驶人,非专业驾驶人由于驾驶技能和心理承受能力的限制,在跟驰过程中为确保跟驰的安全性较专业驾驶人保守,预留的反应空间更大,该结论与van Winsum 的经典研究结论[18]相一致。但笔者在研究过程中未考虑跟驰过程中交通流状态的变化,在未来研究中可在本文的研究基础上探究专业及非专业驾驶人跟驰安全特性随交通流状态变化的变化机理。本研究从微观层面对各类驾驶人的跟驰安全特性进行定量分析,为我国驾驶人安全管理与培训提供了数据支持和理论依据,有助于建立和完善有关行驶安全的交通法律法规。
[1]成 鑫,陈 飞.新手驾驶员紧张度与道路线形及行驶速度相关性分析[J].交通工程,2010(11):242-245.Chen Xin,Chen Fei.Correlation analysis of novice driver’s tension with travel speed and road alignment[J].Traffic Engineering,2010(11):242-245.(in Chinese).
[2]卞晓华.基于驾驶行为的车辆运行安全特性及其模型研究[D].青岛:青岛理工大学,2012.Pian Xiaohua.Study on characteristic and model of vehicle operation safety based on driving behavior[D].Qingdao:Qingdao Technological University,2012.(in Chinese).
[3]McDonald M,Brackstone M,Sultan B,et al.Close following on the motorway:initial findings of an instrumented vehicle study[C]∥Proc.of the 7th Vision in Vehicles Conference.Amsterdam:Elsevier,1997:381-389.
[4]Marsden G,Brackstone M,McDonald M,et al.A comparison of differing driving populations using the ICC FOT classification scheme[C]∥Proc.of 82nd Transportation Research Board Annual Meeting.Washington,DC:TRB,2003:12-16.
[5]Jinan Piao,McDonald M.Low speed car following behaviour from floating vehicle data[C]∥Proc.of 2003IEEE Intelligent Vehicles Symposium.Boston USA:IEEE,2003:462-467.
[6]Taehyung Kim.Analysis of variability in car-following behavior over long-term driving maneuvers[D].Maryland:University of Maryland,2005.
[7]Taieb-Maimon M,Shinar D.Minimum and comfortable driving headways:Reality versus perception[J].Human Factors,2001,43(1):159-172.
[8]Ossen S,Hoogendoorn S P.Car-following behavior analysis from microscopic trajectory data.transportation research record[J].Journal of the Transportation Research Board,2005(1934):13-21.
[9]段冀阳.驾驶员的跟驰风险错觉与无意识行为模仿[D].北京:清华大学,2012.Duan Yiyang.Driver’s risk illusions in car following and unconscious imitation behavior[D].Beijing:Tsinghua University,2012.(in Chinese).
[10]马龙华,唐智慧,程 琳.新老驾驶员的危险感知能力分析[J].中文科技论文在线,2011,6(11):854-857.Ma Longhua,Tang Zhihui,Chen Lin.Analysis ofold and new driver's risk perception[J].Science Paper Online,2011,6(11):854-857(in Chinese).
[11]刘 江,田 萍.驾驶员气质与行车速度关系的初步研究[J].北京工业大学学报,2006,32(1):27-32.Liu Jiang,Tian Ping.Initial research on relationship between driver’s temperament and travel speed[J].Journal of Beijing University of Technology,2006,32(1):27-32.(in Chinese).
[12]杨玲玲.城市出租汽车行驶行为及其安全性研究[D].北京:北京交通大学,2008.Yang Lingling.Study on driving behavior and safety of urban tax[D].Beijing:Beijing Jiaotong University,2008.(in Chinese).
[13]徐 上.驾驶人员驾驶特性及对路段通行能力的影响研究[D].南京:东南大学,2009.Xu Shang.Study of driving characteristics and influence on road traffic capacity[D].Nanjing:Southeast University,2009.(in Chinese).
[14]赵炜华,王丽华.驾驶人所处环境照度对视认距离影响[J].交通信息与安全,2013,31(6):11-16.Zhao Weihua,Wang Lihua.Impacts of environmental luminosity around driver on distance of visual cognition[J].Journal Transport Information and Safety,2013,31(6):11-16.(in Chinese).
[15]Hayward J C.Near miss determination through use of a scale of danger[J].Highway Research Record,1972(384):24-34.
[16]Minderhoud M M,Bovy P H L.Extended time-tocollision measures for road traffic safety assessment[J].Accident Analysis and Prevention.2001,3(1):89-97.
[17]Xiaoqian LI,Jun JIANG,Jian LU.Safety Differences between Novice and Experienced Drivers under Car-Following Situations[C]∥Nanjing,Southeast University and Chinese Overseas Transportation Association,11th International Conference of Chinese Transportation Professionals(ICCTP2011).Nanjing:Southeast University,2196-2207.
[18]van Winsum.Preferred time headway in car-following and individual differences in perceptual-motor skills[J].Perpetual and Motor Skills,1998(87):863-873.
[19]Katja Vogel.A comparison of headway and time to collision as safety indicators[J].Accident Analysis and Prevention,2003(35):427-433.
[20]Hirst S J,Graham R.Ergonomics and safety of intelligent driver interfaces[M].London:Taylor &Francis,1997:203-219.
