雾天对驾驶行为的影响研究——避撞驾驶行为*
2014-12-14闫学东庞洪涛
何 莎 闫学东 庞洪涛 赵 佳
(北京交通大学城市交通复杂系统理论与技术教育部重点实验室 北京 100044)
0 引言
近年来,由雾引发的恶性交通事故频繁发生[1]。据统计,雾天交通事故发生率是正常情况下的近10倍[2]。雾天作为交通事故多发的环境之一,其对驾驶人的驾驶行为、驾驶心理和生理,以及车辆运行状态均有不同程度的影响。因此,对雾天驾驶方面的研究已成为各国交通安全研究的重点,并且对改善我国交通安全状况具有重大意义。
国内外针对雾天驾驶行为方面展开了大量研究。例如,陈秀峰等人[3]研究了驾驶人不同雾天等级能见度下的驾驶速度选择和车辆保持特性;Broughton等人[4]利用高仿真度驾驶模拟器研究驾驶人跟车行为,他们发现在雾天环境下驾驶人跟车距离更短;Kolisetty等人[5]探索出可变信息标志牌(VMS)可以降低驾驶人在雾天环境下的行驶速度,从而提高道路安全性;Ni和Uc等[6-7]发现在浓雾环境下年老者更容易发生交通事故;而Sagberg[8]发现和熟练的驾驶人相比,新手驾驶人的心理承受能力、驾驶经验、对危险情况的感知判断都有欠缺,而雾天环境往往对这些要求更高。以往这些研究主要集中在雾天环境下驾驶人的速度选择[9]和速度控制[10],跟车行为,VMS、年龄、驾驶经验对雾天环境下的驾驶行为影响等,很少涉及到雾天环境下的驾驶人紧急避撞行为研究,特别是驾驶人与行人之间的碰撞。而行人作为道路交通的重要参与者,每年都有大量行人死于交通事故中,特别是在雾天环境下,驾驶人与行人发生碰撞的事故率明显高于无雾环境[11]。相关研究表明,驾驶行为是导致交通事故的重要原因之一[12],为了减少雾天环境下驾驶车辆与行人发生碰撞的风险,深入研究驾驶人在紧急避撞过程中的驾驶行为对于今后开发紧急避撞系统和降低行人-车辆碰撞风险具有深远意义。
本实验采用线形混合效应模型,选取雾天作为干预因素,通过不同雾天等级下的驾驶模拟实验系统地分析雾天环境对驾驶人在紧急避撞过程中的驾驶行为影响,为进一步建立雾天驾驶安全行为评价体系奠定了数据基础,为分析其他干预因素对驾驶行为的影响提供了研究思路和系统的实验分析方法。
1 实验方法与数据来源
1.1 实验对象
实验参与者为46名(男性26名,女性20名)拥有合法驾照的实验人员,年龄为20~52岁(平均年龄为30岁),拥有2年以上驾驶经验以及年驾驶里程超过20 000km。其中职业司机21人,非职业司机25人。
1.2 实验设计
实验主要分析驾驶人在不同雾天环境下的紧急避撞行为变化,采用的设备是北京交通大学驾驶模拟器(BJTU driving simulator)。以46名实验参与者为对象,设计道路限速为80km/h,选取雾天作为干扰条件,由于正常行驶时,驾驶人视野开阔,随着雾的浓度越大,驾驶人在直路上的能见距离不断降低,而浓雾天气能见度低于50 m,因此本次实验设计了无雾、轻雾(能见度为250m)和浓雾(能见度为50m)3个等级的天气条件,见图1,用来分析雾天环境对驾驶人紧急避撞行为的影响。

图1 雾天等级效果图Fig.1 The impression drawing for fog levels
在雾天环境作为干扰因素的前提下,通过TTC传感器(time to collision sensor)实现紧急相撞事件。即当试验车行驶到学校附近时,会触发在路边的行人突然跑步过街,此时,驾驶人需要采取紧急制动或转向等操作才能避免和行人相撞,进而分析驾驶人在紧急避撞过程中的驾驶行为。因为TTC传感器是以时间距离作为触发条件,根据实验中设置的行人跑步速度15km/h和行人距车道中心线的距离15m,可算出行人跑到车道中间位置所用的时间大约是3.5s,所以将TTC传感器的时间阈值设置为3.5s。即当试验车行驶到距离冲突点的时间距离为3.5s时,将触发行人跑步过街。
1.3 数据结构
为使实验数据更加科学合理,实验采取随机形式,即每名实验者随机地参加3次实验(3种雾天等级),每次实验不超过10 min,实验共获得138条数据。每条数据记录能反应驾驶人紧急避撞行为的实验变量,主要包括刹车瞬时速度和刹车反应时间。由于某些驾驶人中途退出实验,不能完整地完成3次实验,导致所测量数据的不完整性,因此,一共有128条数据可用于数据分析,实验所得数据为典型的非平衡重复测量数据。此外实验还记录了实验者的性别、职业等资料。实验人员的基础数据结构见表1。
1.4 分析方法
笔者利用线性混合效应模型进行数据分析,该模型能有效解决重复测量数据缺失问题。一般来说,每个实验个体要求有相同次数的重复测量值,但某些实验个体由于身体不适中途退出实验,导致某个雾天等级下的驾驶行为数据不可用,因此本次实验数据是典型的非平衡重复测量数据,故不适宜用传统的方差分析方法,而线性混合效应模型恰巧能解决这类非平衡重复测量问题。
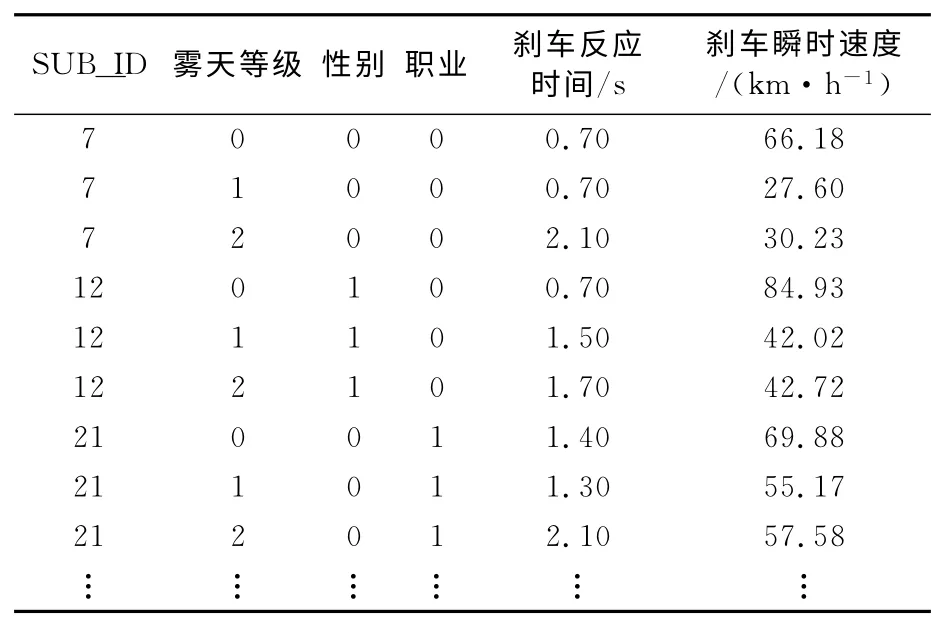
表1 实验数据基础结构Tab.1 The infrastructure for experimental data
线形混合效应模型包含固定效应和随机效应,固定效应主要反映总体特征,而随机效应体现个体差异,并且混合模型不仅充分考虑了重复测量值之间的相关性,还能处理测量值缺失的情况,在重复测量实验中广受应用。因此,线形混合效应模型在一般线形模型的基础上发展为

式中:Y为因变量也是观测变量;X为固定效应自变量的设计矩阵;β为与固定效应相对应的参数向量;Z为随机效应变量的设计矩阵,矩阵结构与X一致;u为与随机效应相对应的参数向量。此时,不要求ε独立同分布,假设ε~N(0,R)。
2 实验结果分析
从多水平模型考虑,这是1 个3(雾天等级)×2(性别)×2(职业)的混合设计。将性别和职业作为固定效应变量,雾天等级作为重复测量变量,利用线形混合模型分析不同雾天环境、性别、职业对驾驶人刹车瞬时速度和刹车反应时间的影响。
2.1 刹车瞬时速度
刹车瞬时速度反映驾驶人避撞前的正常驾驶状态。在α=0.05的置信水平上,雾天等级对刹车瞬时速度具有显著性影响(p<0.01),性别和职业没有统计学意义,见表2。表3 为固定效应参数估计。由表3可见,浓雾环境相比于无雾环境对刹车瞬时速度的影响为负效应(p<0.01)。将浓雾环境作为基线,无雾环境下的平均刹车瞬时速度估计值比浓雾环境高22.31km/h(见式3)。结合图2,无雾环境(68.10km/h)下的平均刹车瞬时速度远高于轻雾(45.43km/h)和浓雾环境(45.85km/h)下的刹车瞬时速度,且轻雾和浓雾环境下的平均刹车瞬时速度基本持平。说明有雾环境下驾驶人在避撞前的车辆瞬时速度低于无雾环境。这是因为雾天环境下驾驶人视野受到限制,在无法判断前方道路交通如何运行及是否有危险的情况下,由于雾天环境的“补偿”[13-14]作用使得驾驶人驾驶行为更加谨慎,通过降低车速来保障行车安全。
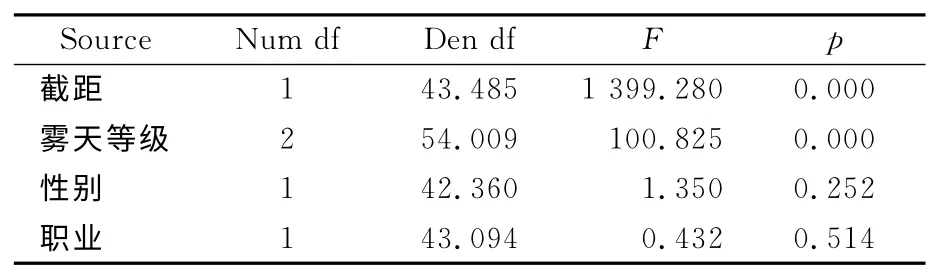
表2 线形混合模型固定效应检验Tab.2 Tests of fixed effects for linear mixed model
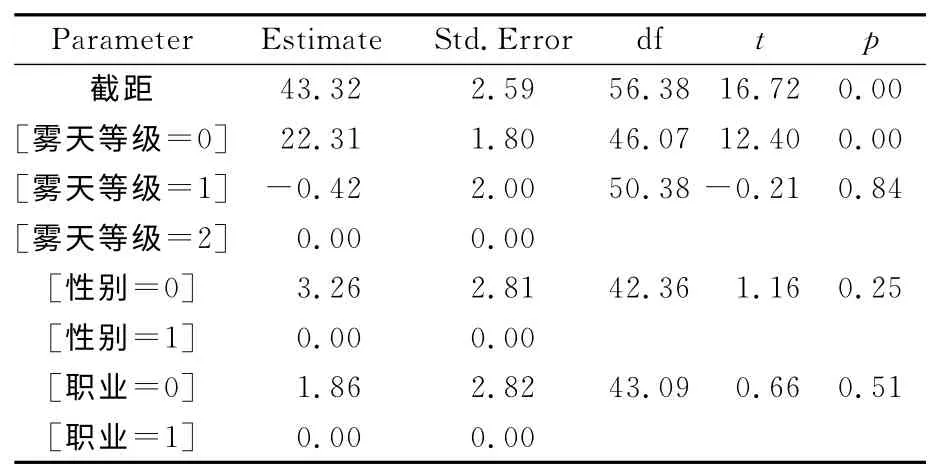
表3 固定效应参数估计Tab.3 Estimates of fixed effects
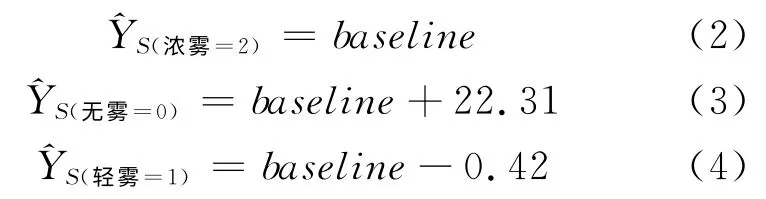
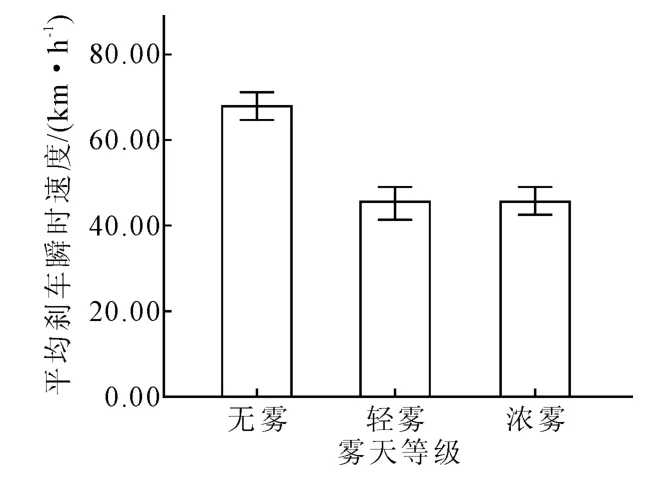
图2 不同雾天等级下的平均刹车瞬时速度Fig.2 Braking instantaneous speed by different fog levels
2.2 刹车反应时间
刹车反应时间能反映出驾驶人在遇到紧急事件时的反应特性。表4结果显示,雾天等级对刹车反应时间具有显著性影响(p=0.03),性别和职业没有统计学意义。由表5可以看出,浓雾环境相比于无雾环境(p=0.02)和轻雾环境(p=0.02),对刹车反应时间的影响为正效应。无雾和轻雾环境下的平均刹车反应时间估计值分别比浓雾环境下低0.36s和0.32s(见式(6)、式(7))。结合图3,浓雾环境下的平均刹车反应时间最高,为1.56s,其次为轻雾(1.26s)和无雾(1.22s)。因此,雾天增加了驾驶人在紧急避撞中的刹车反应时间,这是因为在无雾环境下驾驶人视野更清晰,他们能及时观察到潜在的交通冲突并马上采取相应的避撞措施来减少事故风险,换而言之,随着雾天浓度越大,能见度越低,驾驶人无法清晰准确的做出决策,只有在视野范围内并且捕捉到危险状况后才能采取减速措施,导致刹车反应时间增长。

表4 线形混合模型固定效应检验Tab.4 Tests of fixed effects for linear mixed model

表5 固定效应参数估计Tab.5 Estimates of fixed effects
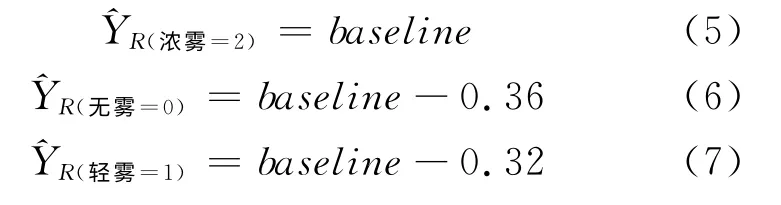

图3 不同雾天等级下的平均刹车反应时间Fig.3 Braking reaction time by different fog levels
3 结束语
实验基于线形混合效应模型探讨了雾天对驾驶人紧急避撞行为的影响。研究结果表明:雾天增加了驾驶人的刹车反应时间,减少了驾驶人的刹车瞬时速度。随着雾天浓度增大,雾天环境下的能见度降低,驾驶人可视距离更短,导致驾驶人对紧急情况不能马上做出反应,从而驾驶人刹车反应时间增长,进而由于“补偿”作用导致驾驶人在雾天环境下的行驶车速较小,遇到紧急情况时的刹车瞬时速度小于无雾环境下的刹车瞬时速度。因此,雾天降低了驾驶人的驾驶安全性。
综合以上结果证明,基于驾驶模拟器和线形混合效应模型研究雾天对驾驶人紧急避撞行为的影响是可行的,线型混合效应模型不仅很好的解决了本次实验中的非平衡重复测量数据问题,同时还充分考虑了每个实验对象重复测量数据之间的相关性,非常适用于多层次结构的资料和重复测量数据。然而由于高仿真度的驾驶模拟器与真实环境存在差异,这会对实验结果产生一定影响,同时文中没有考虑随机效应的影响,有待进一步研究。
[1]蒋贤才,黄 科.雾天道路交通安全保障措施及其成效分析[J].哈尔滨工业大学学报,2012(6):86-91.Jiang Xiancai,Huang Ke.Safeguards and effects of road transportation safety in fog[J].Journal of Harbin Institute of Technology,2012(6):86-91.(in Chinese).
[2]潘晓东,蒋 宏,高 昂.雾天高速公路交通事故成因分析及安全对策[J].交通标准化,2006(10):200-203.Pan Xiaodong,Jiang Hong,Gao Ang.Cause and security countermeasures of traffic accident in foggy expressway[J].Traffic Standardization,2006(10):200-203.(in Chinese).
[3]陈秀峰,曲大义,刘尊民,等.基于驾驶模拟器的雾天驾驶行为特性研究[J].武汉理工大学学报,2013(4):763-766.Chen Xiufeng,Qu Dayi,Liu Zunmin,Hao Jie.Driving performance research in foggy conditions based on driving simulator[J].Journal of Wuhan University of Technology,2013(4):763-766.(in Chinese).
[4]Broughton K L M,Switzer F,Scott D.Car following decisions under three visibility conditions and two speeds tested with a driving simulator[J].Accident Analysis and Prevention,2007,39(1):106-116.
[5]Kolisetty V G B,Iryo T,Asakura Y,et al.Effect of variable message signs on driver speed behavior on a section of expressway under adverse fog conditions:A driving simulator approach[J].Journal of Advanced Transportation,2006,40(1):47-74.
[6]Ni Rui,Kang J J,Andersen G J.Age-related declines in car following performance under simulated fog conditions[J].Accident Analysis and Prevention,2010,42(3):818-826.
[7]Uc E Y,Rizzo M,Anderson S W,et al.Driving under low-contrast visibility conditions in Parkinson disease[J].Neurology,2009,73(14):1103-1110.
[8]Sagberg F.Hazard perception and driving experience among novice drivers[J].Accident Analysis and Prevention,2006,38(2):407-414.
[9]Brooks J O,Crisler M C,Klein N,et al.Speed choice and driving performance in simulated foggy conditions[J].Accident Analysis and Prevention,2011,43(3):698-705.
[10]Owens D Alfred,Wood Joanne,Carberry Trent.Effects of reduced contrast on the perception and control of speed when driving[J].Perception,2010,39(9):1199-1215.
[11]Kim Joon-Ki,Ulfarsson G F,Shankar V N,et al.A note on modelling pedestrian-injury severity in motor-vehicle crashes with the mixed logit model[J].Accident Analysis and Prevention,2010,42(6):1751-1758.
[12]严新平,张 晖,吴超仲,等.道路交通驾驶行为研究进展及其展望[J].交通信息与安全,2013(1):45-51.Yan Xinping,Zhang Hui,Wu Chaozhong,et al.Research progress and prospect of road traffic driving behavior[J].Transport Information and Safety,2013,31(1):45-51.(in Chinese).
[13]Nishida Y.Driving characteristics of the elderly:risk compensation of the elderly driver from the viewpoint of reaction behavior[J].JSAE Review,1999,20(3):375-380.
[14]Trick L M,Toxopeus R,Wilson D.The effects of visibility conditions,traffic density,and navigational challenge on speed compensation and driving performance in older adults[J].Accident Analysis and Prevention,2010,42(6):1661-1671.
