车路协同环境下驾驶行为特性与交通安全综述*
2014-12-14鲁光泉
鲁光泉 宋 阳
(1.北京航空航天大学交通科学与工程学院 北京 100191;2.北京航空航天大学车路协同与安全控制北京市重点实验室 北京 100191)
0 引言
交通系统是1个典型的复杂系统,依靠传统的交通管理方式,难以应对当今日益复杂的交通拥堵,事故频发,环境污染等问题[1]。随着计算机技术和信息技术的飞速发展,车路协同技术的出现为缓解交通拥堵,改善交通安全,提供了新的技术手段,并引发了管理理念上的革命性变化。车路协同作为车车/车路通信基础上的高级应用,以提高道路安全为目标的同时,也为交通信息感知、交通服务和交通控制提供了新的思路[2]。当前的智能交通技术正在从单个交通要素的智能化转向一体化发展,车路协同系统作为智能交通系统的重要子系统和新的发展方向,目前正受到国内外科研人员的广泛关注,车路协同是当前世界交通发达国家的研究热点。
车路协同相关技术的主要目标是提高交通安全水平,但是车路协同技术在努力提升交通安全水平的同时,也会对驾驶人的驾驶行为带来影响[3]。在各类交通事故中,人的因素占很大比重,驾驶人行为已被世界公认为引发道路交通事故的主要因素[4]。因此,对车路协同下的驾驶行为进行分析,探讨车路协同对驾驶行为的影响十分必要。
1 车路协同技术
1.1 车路协同系统概述
车路协同系统[5](cooperative vehicle infrastructure system)是基于先进的传感和无线通信等技术,实现车车、车路信息的实时动态交互,完成交通信息的采集和融合,从而保障复杂交通环境下车辆行驶安全,提高路网运行效率的新一代智能交通系统技术。
车路协同系统最主要的2个子系统是路侧单元和车载单元,各个交通组成单元通过路侧单元和车载单元,以有线或无线通信方式来实现车辆与车辆、车辆与路侧以及路侧与路侧之间的信息传输和共享[6]。
路侧单元[7]的主要功能是:收集路侧传感器检测到的各种信息(如交通流量、突发事件、密集人群、交叉口行人信息、道路异物侵入、路面湿滑状态),以无线短程通信的方式发送给车辆,以有线或无线通信的方式发送给其它路侧单元或管理中心;接收来自车载单元或其他路侧单元的信息。
车载单元[8]的主要功能是:收集各类车载传感器采集到的信息(如定位、运动等)进行融合处理后发送给其它车载单元;接收来自其它车载单元的信息;接收来自路侧单元的信息;对接收到的信息和收集到的本车传感器信息进行融合处理,做出安全预警判断和车辆控制决策,以合适的交互方式向驾驶人提供信息,或向车辆控制单元发出控制指令。
1.2 车路协同技术的应用
车路协同技术的应用主要包括[9]:安全应用、交通管理与服务应用。在车路协同的安全应用中主要由基于车车信息交互的安全应用和基于车路信息交互的安全应用。
基于车车信息交互的安全应用场景主要包括[10]:基于车车协同的交叉口车辆避撞,基于信息交互的车辆跟驰,基于车车协同的车辆换道,基于车车协同的非正常占道预警,以及紧急制动电子制动灯预警等五种车车协同系统的典型应用。
基于车车协同的交叉口车辆避撞:在交叉口,通过车车信息交互,可以对路口的车车冲突状态进行预测和评估,实现冲突消解,避免碰撞[11];基于信息交互的车辆跟驰:在同向同车道行驶中,通过车车信息交互,可以对跟驰中的车车冲突状态进行预测与评估,避免碰撞[12];基于车车协同的车辆换道:在换道过程中,换道车辆通过感知周围车辆的状态,确定合适的换道时机,并通过无线通信,把换道信息传递给周围车辆,从而提高换道行驶安全性[13];基于车车协同的非正常占道预警:车辆出故障或因其它原因发生非常的占道,事故车辆向一定区域内的驾驶车辆发送警告信息就可以避免不必要的碰撞[14];紧急制动电子制动灯预警:当车辆在分离摩擦系数或者摩擦系数较低的路面行驶时,车辆容易发生打滑,驾驶人往往会采取紧急制动措施,但这对其他车辆容易造成碰撞事故。如果车辆自动给其他车辆发送警告信息,就可以避免事故发生[15]。
对于不同的应用,对车辆运动状态信息采集、预警与控制模型和车辆运动状态控制的要求不同。基于车路信息交互的安全应用中,车辆主要以路侧单元发送的信息进行危险判断,进而对驾驶人的操作进行引导,或对车辆进行控制。
但无论是什么样的安全应用,对驾驶人的引导或预警是其中的重要一步,这必将对驾驶人的驾驶行为产生影响。同时,由于信息感知与决策判断的引入,导致汽车行驶过程中的人车路相互作用系统发生改变,这种改变会对驾驶过程安全可靠性产生影响,并间接影响到汽车行驶安全性。
2 车路协同技术对驾驶安全的影响
驾驶行为是与驾驶人相关的各种处理操作的总称。典型的驾驶行为过程主要包括感知、判断和操作3个阶段[16]。驾驶人首先在感知到周围环境信息的情况下,对得到的信息进行分析处理后做出相应判断,然后通过对车辆进行操作,改变车辆运动状态并达到驾驶操作目的。在整个过程当中,驾驶人是整个操作的核心,也是影响交通安全的主体[17]。
2.1 对驾驶人行为的影响
车路协同环境对驾驶人的影响是多方面的。驾驶行为过程总体上可以分为感知、判断和操作3个阶段。其中车路协同环境对驾驶行为的影响主要体现在前2个阶段[18]。
感知阶段是后续各个阶段的基础,快速获得准确的信息是保障后续正确判断,准确操作的基础。影响驾驶人感知速度和准确程度的主要影响因素是注意力分配和信息负荷大小[19]。林彩霞等[20]通过对比分析使用导航系统、地图、以及凭记忆驾驶3种情况的实验结果得到,在不同的情形下,驾驶人落在道路前方的注意力分别为:57%,78%,85%。这表明,在驾驶过程中使用导航设备,会导致行驶过程中更多注意力需要放在导航系统中,影响了驾驶人的注意力分配。E.J.Calabrese[21]根据Yerkes-Dodson定理,得出在工作负荷增加时驾驶人疲劳和注意力缺失情况逐步减少,驾驶绩效逐渐提高;但是达到理想状态后,工作负荷增大会降低驾驶绩效,造成主动注意力分散和驾驶疲劳。
近年来,随着车路协同技术的快速发展,人们开始关注车路协同技术对驾驶行为的影响。
Haneen Farah等[22]研究表明在使用车路协同系统时,驾驶人的精神状态如眨眼频率、心跳频率等均表明驾驶人的紧张程度的感知会比不使用车路协同系统时低。相比与年轻人,车路协同系统对老年人的作用更大,它能够提高驾驶人的感知水平,缩短驾驶人的感知时间。Pengjun Zheng和Mike McDonald[23]提出自适应巡航系统能够通过雷达、摄像头等能在车辆行驶过程中主动收集周围环境变化信息,提高驾驶人的态势感知能力并减少焦虑。Karel A.Brookhuis等[24]提出了先进的驾驶辅助系统能够有效减少甚至消除驾驶人的失误,显著减少人员伤亡、经济损失和环境污染,同时增加道路容量。先进的驾驶辅助系统通过为驾驶人提供驾驶相关的建议、指导和警告,能有效减少驾驶人的反应时间,在车路协同系统持续工作的情况下,驾驶人的反应时间可以减少到1s。但Heejin Kim 等[25]提出驾驶人在行车途中如果操作车载信息系统如车载导航或者车载多媒体系统会造成对驾驶操作的延迟,研究表明对不同的行驶速度延迟时间不同,车速为50km/h的延迟为5.7s,车速为100km/h的延迟为7.9s。
尽管现在还没有明确的结论表明车路协同技术对驾驶行为会产生什么样的影响,但相关研究领域的结果可以为分析车路协同对注意力的影响提供借鉴。无论是基于车车信息交互的安全应用还是基于车路协同的安全应用,人机交互是其中1个重要的环节。车载单元要通过人机交互方式,把安全判断的结果告诉驾驶人。这种人机交互方式可以是语音,也可以是图像,还可能两者都结合在一起。但无论是哪1种方式,都会导致驾驶人注意的重新分配。因此,在进行车路协同安全应用设计时,合理的人机交互模式是使驾驶人分配给人机交互系统的注意力最小[26]。
2.2 对行驶安全可靠性的影响
传统的驾驶行为主要由以驾驶人为核心的感知、判断和操作过程构成1 个闭环的控制系统。从系统可靠性的角度看,表述为分别由感知、判断和操作3个子系统串联的系统,见图1。

图1 传统的驾驶过程Fig.1 Traditional process of driving
车路协同技术的安全应用,改变了汽车的驾驶过程。车路协同技术安全应用可以分为2类:一类是以预警为目的的安全辅助系统,见图2;另一类以自动控制为目的的安全辅助系统,见图3。正如Haneen Farah等[22]的研究结果所表明的那样,在使用车路协同系统时,驾驶人的精神状态如眨眼频率、心跳频率等均表明驾驶人的紧张程度的感知会比不使用车路协同系统时低。相比与年轻人,车路协同系统对老年人的作用更大,它能够提高驾驶人的感知水平,缩短驾驶人的感知时间。

图2 装备车车/车路安全预警辅助系统的驾驶过程Fig.2 Driving process equipped with car-to-car/car-toroad auxiliary safety warning systems
从系统可靠性的角度看,以预警为目的的安全辅助系统可以认为是在感知阶段与驾驶人的感知并联了1个自动感知系统。该系统的并入,能够提高驾驶人的感知水平,缩短驾驶人的感知时间。另一方面,车车/车路协同在感知的基础上还进行危险的判断与预警。尽管该系统判断和预警的结果还需要驾驶人在此基础上做出决策,但也会有效缩短驾驶人的判断决策时间。对于并联系统,系统的可靠性要高于其单个的子系统可靠性。因此从一定意义上说,以预警为目的的车路协同安全应用系统的引入,可以提高感知过程的可靠性。
与以预警为目的的安全辅助系统不同的是,具有自动控制功能的安全辅助控制系统在对车辆的安全状态进行判断后,不但给驾驶人预警信息,还在必要的情况下向车辆的自动控制机构(如制动控制机构、加速控制机构)发出自动控制指令,见图3。从系统可靠性的角度出发,该系统不但在驾驶人控制系统的基础上在感知环节并联了自动感知子系统,还在操作阶段并联了自动控制子系统。正如前面论述的一样,在各个子系统可靠性不变的情况下,整个系统的可靠性会有所提高,因此车路协同技术的引入,应该可以提升行车过程的安全可靠性。
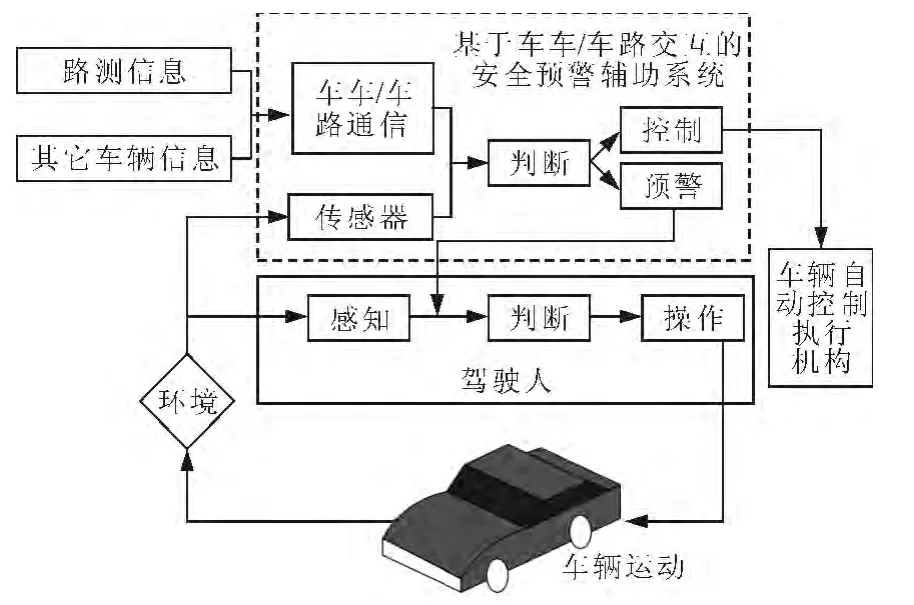
图3 装备车车/车路安全控制辅助系统的驾驶过程Fig.3 Driving process equipped with car-to-car/car-toroad auxiliary safety control system
3 车路协同对交通安全的影响
车路协同使得驾驶人可以获得丰富的外部信息,甚至是看不到的信息。通过车路协同系统,可以帮助驾驶人更快地作出决策判断,有利于提高驾驶安全性。然而这种结论是在现有驾驶人行为特征的情况下得出的,在车路协同技术的安全应用广泛使用之后,这样的结论并不一定准确。
车路协同技术的应用,有可能改变驾驶人的驾驶行为特征。原来的驾驶行为是以人为中心的,现在并联了自动感知、自动判断,甚至自动控制的过程。从系统可靠性的角度来说,多个子系统并联的系统可靠性高于其中的任何1个子系统的可靠性。但是这个结论有1个前提,这些子系统的可靠性是不变的。但车路协同技术的应用,有可能改变驾驶人的驾驶行为特征,从而引起驾驶人驾驶过程的安全可靠性发生变化,换句话说,由于引入了车路协同技术,图1中驾驶人的驾驶行为特征与图2或图3中的驾驶人的驾驶行为特征不同。
尽管目前对车路协同技术对驾驶行为的影响研究才刚刚开始,对车路协同技术对驾驶人在感知、判断和操作各过程的影响还没有明确的结论,但从现有研究可以看出,预警信息对驾驶人的驾驶行为的影响是不可忽视的,一方面预警信息有利于缩短驾驶人的判断决策时间,另一方面驾驶人对车路协同人机交互信息的关注会导致注意力的分散。
另1个值得关注的是,车路协同技术的发展有可能引起驾驶人的技术依赖,就像习惯了具有倒车辅助系统的驾驶人在驾驶没有倒车辅助系统的汽车时容易观察不足一样。一旦形成技术依赖,有可能导致图2和图3中由于驾驶人习惯了依赖车路协同系统的感知与判断,会导致驾驶人子系统的可靠性降低,就需要车路协同安全应用系统具有非常高的可靠性来保障汽车行驶安全可靠性。否则,图2和图3所示的系统安全可靠性有可能由于驾驶人子系统可靠性的降低而抵消车路协同安全应用系统带来的安全性能提升优势,甚至有可能使安全性降低。因此,车路协同安全技术全面应用之前,应确保该系统的可靠性高于驾驶人感知、判断、操作的系统可靠性。
尽管车路协同安全应用技术的研究取得了快速的发展,但目前,定位的精度和可靠性、通信系统的可靠性、控制系统的可靠性是否能满足车路协同安全应用还有待进一步测试分析。也正因为如此,大量学者致力于车路协同技术中定位、通信和控制系统的研究,如Jihua Huang等[27]研究了基于差分全球定位系统(DGPS)的定位和车辆间通信的检测道路危险错误的性能影响,统计分析了特征的位置和轨迹预测误差估计,并将模拟通信错误作为预测误差的一部分来确定检测车载导航系统质量;Roozbeh Kianfar等[28]提出了1 种协同自适应巡航控制(CACC)设计架构,并作为地面协同控制驾驶(GCDC)的一部分,通过对不同的模块进行了测试,来保证达到并能保证GCDC要求的最大延迟水平;M.Sepulcre等[29]通过挑战性的驾驶和通信条件下车车通信平台的主动安全应用测试,结果表明安全应用可以在高速行驶正常使用,通信传播没有阻碍。但通信系统的可靠性还有待进一步检验,特别是在干扰环境下的通信可靠性。
车路协同安全应用技术是解决交通安全问题的革命性技术,但在强调其对提升行车安全性能的同时,要重视该技术的应用对驾驶人的影响,并把这种影响对交通安全的影响作为车路协同安全技术研究的重要内容。
4 结束语
2014年2月3日,美国交通运输部在发表对外声明,决定推动车车通信技术在轻型车上应用,这标志着车路协同技术即将从实验室走向应用市场[30]。作为车路协同的重要组成部分,车车协同技术是继安全带、安全气囊之后新一代安全技术。这对交通领域将是1个革命性的变化,车车协同技术的发展,将对道路交通协同的控制、管理、运用等各方面产生革命性的影响。作为智能交通的重要组成部分,车路协同对提高交通运输系统的效率和安全性,实现交通系统的可持续性发展具有十分重要的意义。车路协同环境下,交通控制与交通诱导一体化将得以实现,道路资源合理分配并发挥更高效率[31]。可以说车路协同技术走向全面应用只是时间的问题。但在车路协同安全应用技术走向全面应用之前,评估该技术对安全的影响,特别是如何最大限度地发挥其安全保障作用,是亟需开展的研究。2012 年,美国在约3 000辆车上安装了车车通信系统开展大规模的车路协同应用测试,安全预警是该系统的主要组成部分,也是其重要的测试内容。通过这个项目的测试,车路协同安全预警系统如何影响驾驶行为还有待数据分析结果。
就车路协同安全应用技术对驾驶人行为特性、如何最大化发挥其安全保障作用,下述研究将必不可少。
1)车路协同技术对注意力分配的影响:研究车路协同技术的应用对驾驶人的注意力分配带来的影响,是否会造成驾驶人注意力过多分配到车路协同设备上从而影响驾驶安全。
2)车路协同技术对驾驶人判断决策过程的影响:研究车路协同技术的应用给驾驶人判断决策过程带来的变化,是否会引起驾驶人决策时间延长从而影响驾驶安全。
3)驾驶人对车路协同技术的依赖及其对安全的影响:研究车路协同技术的应用造成驾驶人对设备的依赖,当设备出现故障时是否会引起交通安全隐患。
4)行车安全对车路协同系统可靠性的要求:研究车路协同系统出现故障时是否会对行车安全带来影响,明确车路协同系统设备需要多高的可靠性水平才能保证事故风险水平低于目前水平。
5)面向安全的车路协同系统人机交互设计方法:研究车路协同系统人机交互方式的设计是否会引起驾驶人的驾驶行为改变会带来哪些改变以及是否对驾驶安全造成影响。
[1]王云鹏.国内外ITS系统发展的历程和现状[J].汽车零部件,2012(6):36.Wang Yunpeng.History and present situation of the development of ITS systems[J].Automobile Parts,2012(6):36.(in Chinese).
[2]Xu Q,Mak T,Ko J,et al.Vehicle-to-vehicle safety messaging in DSRC[C]∥Proceedings of the 1st ACM international workshop on vehicular ad hoc networks,Newyork:ACM,2004.
[3]龚思远.车路协同跟车辅助下的驾驶员跟驰行为研究[D].长春:吉林大学,2013.Gong Siyuan.Research on driver's car-following behavior with car-following suggetion of cooperative vehicle infrastructure system[D].Changchun:Jilin University,2013.(in Chinese).
[4]张 迪.北京市区道路交通事故致因分析与安全对策[D].郑州:河南理工大学,2012.Zhang Di.Beijing area due to road traffic accidents cause analysis and safety measures[D].Zhengzhou:Henan Polytechnic University,2012.(in Chinese).
[5]陈 超,吕植勇,付姗姗,等.国内外车路协同系统发展现状综述[J].交通信息与安全,2011(1):102-105.Chen Chao,Lu Zhiyong,Fu Shanshan,et al.Review of current development of domestic and foreign cooperative vehicle infrastructure system[J].Journal of Transport Information and Safety,2011(1):102-105,9.(in Chinese).
[6]邹 枫.智能交通车路协同系统数据交互方式设计与验证[D].北京:北京交通大学,2014.Zou Feng.Design and verification of the CVIS data exchange standards[D].Beijing Jiaotong University,2014.(in Chinese).
[7]王宗暐.智能路侧系统在车路协同技术中的应用[J].中国市政工程,2013(4):66-67,96.Wang Zongwei.Application of intelligent roadside systems in cooperative vehicle infrastructure system techonology[J].China Municipal Engineering,2013(4):66-7,96.(in Chinese).
[8]何崇中,雷 健,唐岳东,等.智能车载系统的发展与SmartVM 的应用[J].汽车零部件,2013(10):60-3,6.He Chongzhong,Lei Jian,Tang Yuedong,et al.Development of intelligent car-mounted system and application of smartVM [J].Automobile Parts,2013(10):60-3,6.(in Chinese).
[9]易振国.车路协同实验测试系统及安全控制技术研究[D].长春:吉林大学,2011.Yi Zhenguo.Vehicle infrastructure integration experimental testing system and safety control technology[D].Changchun:Jilin University,2011.(in Chinese).
[10]俄文娟.无信号交叉口车车冲突检测与消解算法研究[D].长春:吉林大学,2012.E Wenjuan.Reasearch on Vehicle Conflict Detection and Resolution Algorithm at Unsignalized Intersection[D].Changchun:Jilin University,2012.(in Chinese).
[11]王 彬.基于车路协同技术的交叉口协调方法研究[D].北京:北京工业大学,2013.Wang Bin.Research on coordination method for single intersection based on cooperative vehicle infrastructure system techonology[D].Beijing:Beijing University of Technology,2013.(in Chinese).
[12]唐 亮.信息化条件下营运车辆安全监管关键技术研究[D].重庆:重庆大学,2012.Tang Liang.Study on the key technologies of safe supervision for commercial vehicle operations supported by information technology[D].Chongqing:Chongqing University,2012.(in Chinese).
[13]杨晓光,黄罗毅,王吟松,等.基于车车通信的换道超车辅助系统设计与实现[J].公路交通科技,2012(11):120-124.Yang Xiaoguang,Huang Luoyi,Wang Yinsong,et al.A novel lane change and overtaking assist system design and implementation based on vehicle-tovehicle communication[J].Journal of Highway and Transportation Research and Development,2012(11):120-124.(in Chinese).
[14]于艳花.基于故障树分析理论的高速公路预警系统研究[D];西安:西安建筑科技大学,2012.Yu Yanhua.The research of freeway early warning system based on fault tree analysis theory[D].Xi'an:Xi'an University of Architecture and Technology,2012.(in Chinese).
[15]彭晓燕.汽车线控制动系统安全控制技术研究[D].长沙:湖南大学,2013.Peng Xiaoyan.Research on safety control method of automative brake system based on c-by-wire[D].Changsha:Hunan University,2013.(in Chinese).
[16]毕建彬.道路交通事故的人因分析与驾驶员可靠性研究[D].北京:北京交通大学,2012.Bi Jianbin.Research of driver reliability and human factors analysis in road traffic accidents[D].Beijing:Beijing Jiaotong University,2012.(in Chinese).
[17]巩建强.车辆驾驶人事故前应急操作行为模式研究[D].西安:长安大学,2012.Gong Jianqiang.Vehicle driver's pre-accident emergency operation behavior patterns study[D].Xi′an:Chang'an University,2012.(in Chinese).
[18]于立勇.基于车路协同安全距离模型的车速引导系统研究[D].北京:北京交通大学,2014.Yu Liyong.Study of speed guide system based on safety distance model in cooperative vehicle infrastructure system[D].Beijing:Beijing Jiaotong University,2014.(in Chinese).
[19]李平凡.驾驶行为表征指标及分析方法研究[D].长春:吉林大学,2010.Li Pingfan.Research on indices and analysis of driving behavior[D].Changchun:Jilin University,2010.(in Chinese).
[20]林彩霞,刘浩学.车载信息终端对驾驶员操作行为影响的分析[J].丹东师专学报,2002(4):62-63.Lin Caixia,Liu Haoxue.Analysis of the vehicle information terminalon driver's operating behavior[J].Journal of Dandong Teachers College,2002(4):62-63.(in Chinese).
[21]Calabrese E J.Converging concepts:adaptive response,preconditioning,and the Yerkes-Dodson Law are manifestations of hormesis[J].Ageing research reviews,2008,7(1):8-20.
[22]Farah H,Koutsopoulos H N.Do cooperative systems make drivers’car-following behavior safer?[J].Transportation Research Part C:Emerging Technologies,2014,41(61):72.
[23]Zheng P,McDonald M.Manual vs.adaptive cruise control:Can driver’s expectation be matched?[J].Transportation Research Part C:Emerging Technologies,2005,13(5/6):421-31.
[24]Brookhuis K A,de Waard D,Janssen W H.Behavioural impacts of advanced driver assistance systems-an overview[J].European Journal of Transport and Infrastructure Research,2001(3):245-53.
[25]Kim H,Kwon S,Heo J,et al.The effect of touch-key size on the usability of In-Vehicle Information Systems and driving safety during simulated driving[J].Applied Ergonomics,2014,45(3):379-88.
[26]王 颖.基于人机交互仿真的驾驶次任务研究[D].北京:清华大学,2009.Wang Ying.In-vehicle secondary task study based on human-machine interactive simulation[D].Beijing:Tsinghua University,2009.(in Chinese).
[27]Huang J,Tan H S.Error analysis and performance evaluation of a future trajectory based cooperative collision warning system [J].Intelligent Transportation Systems,IEEE Transactions on,2009,10(1):175-80.
[28]Kianfar R,Augusto B,Ebadighajari A,et al.Design and experimental validation of a cooperative driving system in the grand cooperative driving challenge[J].Intelligent Transportation Systems,IEEE Transactions on,2012,13(3):994-1007.
[29]Sepulcre M,Gozalvez J,Hernandez J.Cooperative vehicle-to-vehicle active safety testing under challenging conditions[J].Transportation research part C:emerging technologies,2013(26):233-255.
[30]裴 欣,滕继濮.智能车路协同:人、车、路的对话[N].2014-06-06.Pei Xin,Teng Jipu.Intelligent cooperative vehicle infrastructure system:dialogue people,vehicles,roads[N].2014-06-06.(in Chinese).
[31]马 杨.车路协同,还有多远?[J].中国交通信息化,2011(9):30-31.Ma Yang.Cooperative Vehicle Infrastructure,How Far?[J].China ITS Journal,2011(9):30-31.(in Chinese).
