基于面向对象分类方法的Rapideye桉树提取
2014-12-14王学成
王学成,杨 飞
(1. 山东理工大学建筑工程学院,山东 淄博 255000;2. 中国科学院地理科学与资源研究所 资源与环境信息系统国家重点实验室,北京 100101)
桉树(Eucalyptus)是重要的速生丰产林树种之一,已被全世界90多个国家和地区引种。我国引种桉树最早始于19世纪90年代,至2013年底栽培面积达450万hm2,主要分布在广西、广东、海南等省区[1]。
遥感是一种快速大面积宏观监测的技术手段,利用遥感影像对区域内桉树种植面积进行变化监测,能够及时掌握区域内的桉树资源信息,为林业等相关部门决策提供有力的依据。目前,利用遥感影像提取特定地物信息已有大量相关研究。传统的分类方法主要基于像元分类,极易出现“椒盐现象”,分辨率越高、这种现象愈严重。面向对象分类方法,以影像对象为分类单元,综合考虑了像元的光谱信息、对象内部的结构、纹理以及相邻对象之间的关联信息,可以在很大程度上减少“椒盐现象”的出现,提高分类精度[2-3]。黄慧萍等[4]和韩玲玲等[5]使用面向对象分类方法对遥感影像进行城市绿地提取,韩凝等[6]使用面向对象分类方法对IKONOS影像进行香榧(Torreya grandis)分布信息提取,陈燕丽等[7]使用面向对象分类方法对 SPOT 5影像进行水稻(Oryza latifolia)种植面积提取,岁秀珍等[8]使用面向对象分类方法对 TM 影像进行水体信息提取,还有学者使用面向对象分类方法对遥感影像进行小麦(Triticum aestivum)种植面积提取[9-11]。至今为止,已有部分学者开始初步利用遥感技术反演桉树叶面积指数、种植密度、生物量等试验研究[12-13],但遥感技术在桉树空间提取方面应用仍较缺乏,目前仅见少量学者开始尝试研究。付晓等[14]利用传统监督和非监督分类方法以及TM影像对桉树资源空间分布进行多时期动态监测,提取精度大致可达85%。牟智慧等[15]利用面向对象方法提取3种森林类型,进而提取桉树空间分布信息,分类精度为86.67%。
本研究以广东省肇庆市部分地区为例,采用面向对象分类方法,对高分辨率Rapideye影像进行桉树提取并进行精度评价,从而与最小距离法进行比较分析,旨在为广大林业工作者进行桉树信息提取提供参考。
1 研究区概况和数据处理
1.1 研究区概况
肇庆市位于广东省中西部、西江中游,其地理坐标为东经 111°21′ ~ 112°52′,北纬 22°47′ ~ 24°24′之间,地势以丘陵低山为主,属亚热带季风气候。境内森林资源丰富,森林覆盖率高达 65.1%,商品林面积80万hm2,占林业用地总面积的74.9%。本研究选取肇庆市部分地区(肇庆市市辖区和高要市)为研究区(图1),位于肇庆市南部,北接广宁县、四会市,西临德庆县、云浮市。
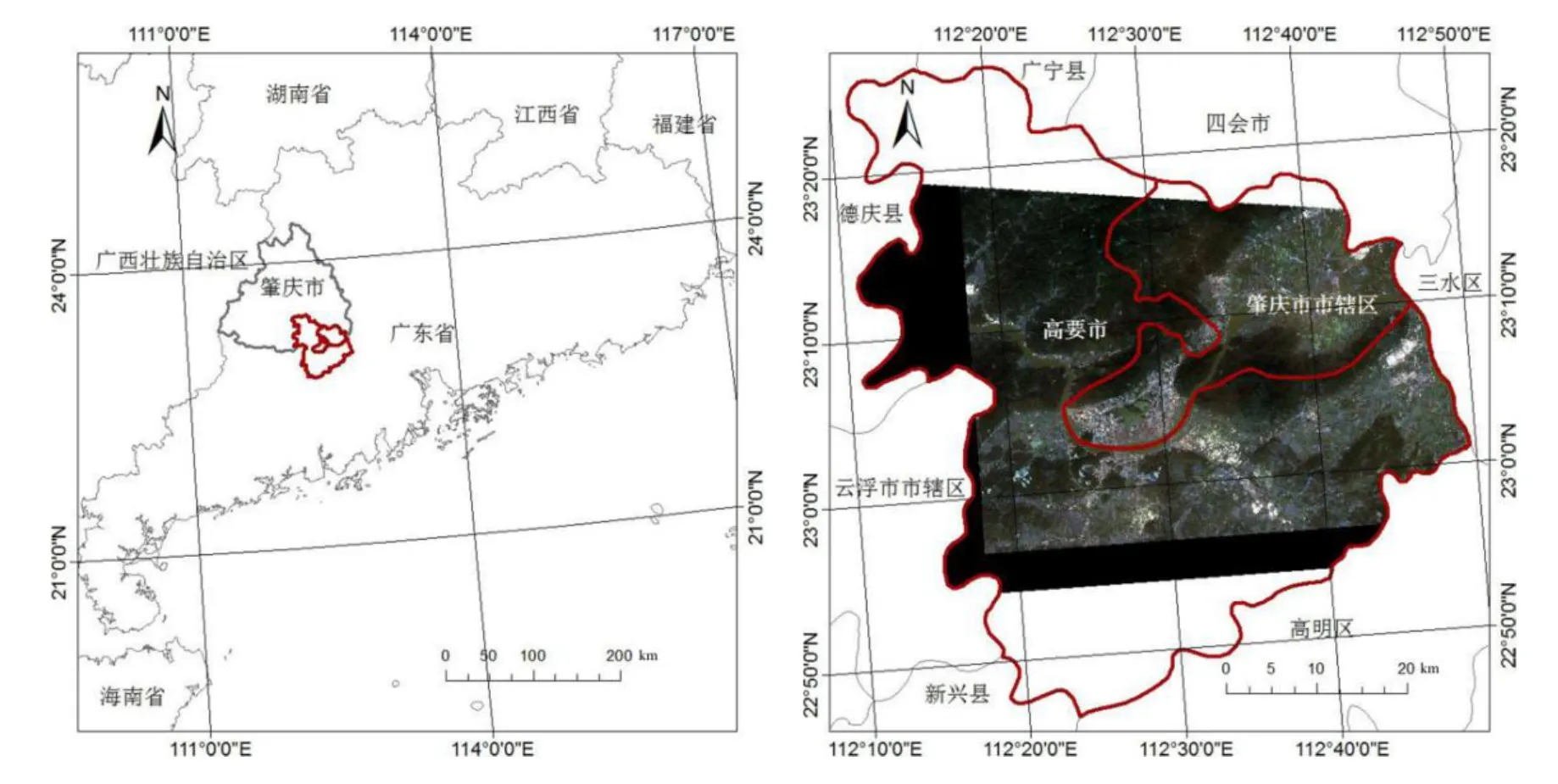
图1 研究区示意图
1.2 影像处理
利用ENVI软件平台,以肇庆市TM影像为基准影像,对Rapideye影像进行几何校正,结合DEM数据,对Rapideye影像进行正射校正;利用ArcGIS软件平台,将样本验证点保存为矢量格式,附上验证点属性。
1.3 影像分类方法
最小距离法是一种传统的监督分类方法,以像元作为基本分类单元,计算待分类像元到各个样本区域的距离,将待分类像元分类为距离最小的类别。
面向对象分类方法以影像对象作为基本分类单元,可在一定程度上减少或避免“椒盐现象”的产生。本研究利用面向对象分类软件eCognition进行桉树信息提取,其中最邻近法和隶属度函数法为eCognition软件平台中最为常见的分类方法。
最邻近法:与最小距离法有相似之处,需要选取样本进行训练,最邻近法通过样本对象特征空间计算得出的隶属度、均值距离以及最小距离来判定待分类对象所属类别,适合对象特征相近或重叠度较高的地物之间的识别[16]。
隶属度函数法:又称成员函数法,根据所选样本对象特征生成一个隶属度从0到1的函数,影像分类时,根据待分类的影像对象反应的各个类别的隶属度值,将对象分类为隶属度值最高的类别,适合对象特征比较明显的地物之间的识别。
1.4 Rapideye影像分类
1.4.1 信息提取流程
根据本研究目的以及研究区所处地理环境,本研究对Rapideye影像进行解译,首先使用隶属度函数法将影像分类为植被与非植被两个类别,使用最邻近法将植被类别分类为桉树、阔叶林、针叶林、针阔混交林、其它林地、草地以及部分农田,然后将非植被和部分农田合并为其它用地,总计7个分类类别,具体信息提取流程如图2。
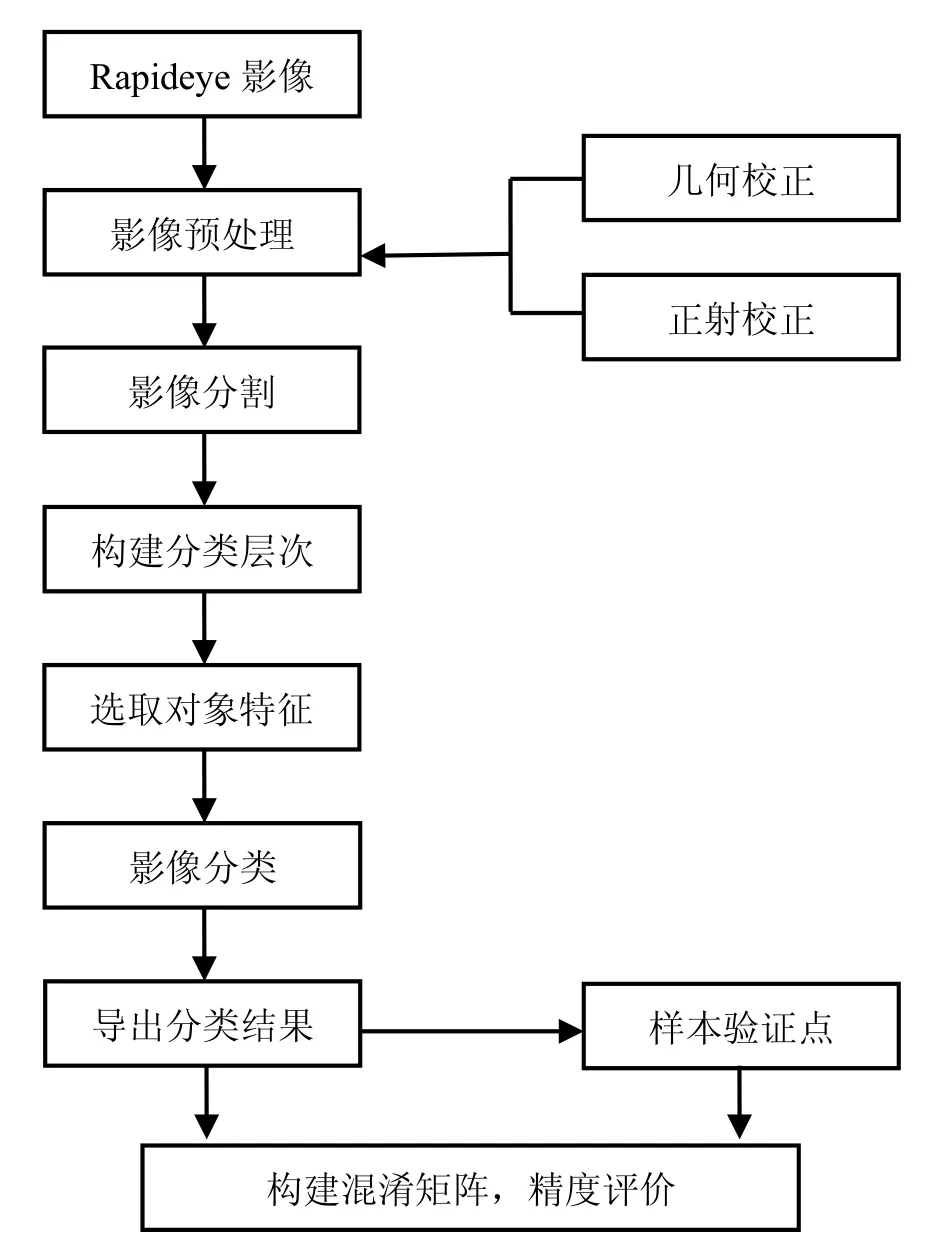
图2 Rapideye影像信息提取流程图
1.4.2 影像分割
影像分割是面向对象分类方法和传统监督分类方法的重要区别,影像分割后才能生成影像对象。面向对象分类方法中,影像分割是必不可少的关键环节,分割质量的好坏直接影响着影像解译结果。目前有多种影像分割方法,大致可分为两种,即“定性”和“定量”,“定性”又可称之为试错法[17],即进行多次影像分割实验,最终影像分割参数及其他相关参数。本研究中,为避免此类信息混在一起,经过多次试错,最后确定分割参数为70,光谱因子为0.8,形状因子为0.2,紧凑度为0.5,光滑度为0.5,红:绿:蓝:红边:近红波段权重比分别是1:1:1:1:1。
1.4.3 建立解译标志
建立遥感影像的地类信息标志,实质为选择样本,进行样本训练,筛选出合适的样本对象特征参与影像解译过程。本研究所采用的面向对象分类方法将隶属度函数法和最邻近法相结合,对Rapideye影像进行解译。隶属度函数法,适合对象特征差异比较明显的地类信息之间,选取少量特征即可,本研究使用归一化植被指数(NDVI),这一特征有利于区分植被信息和非植被信息;最邻近法,适合对象特征比较相近或重叠度较高的地类信息之间,需要多个特征参与到影像分类中,通过比较类别间的对象特征值,本研究最终选取影像对象的亮度值、红绿蓝3个波段的波段均值以及影像对象的最大差分值,总计5个对象特征参与到影像分类中。
1.4.4 分类过程简介
在eCognition软件中,调节NDVI的阈值,区分植被与非植被,经过多次调节,最终确定 NDVI值大于0.07为植被信息,其余为非植被信息,分类结束后,将筛选好的5个对象特征添加到最邻近法分类器中,进行第二层次分类,分类结束后,将分类结果分别导出[18]。
1.4.5 精度评价
精度评价是遥感影像解译中必不可少的步骤,本研究总共选取212个样本验证点对研究区影像的解译结果进行精度评价,并通过构建混淆矩阵,计算两种分类方法的Kappa系数。其中所选取的样本验证点均来源于谷歌高分辨率影像,由于谷歌高分辨率影像拍摄时间与 Rapideye影像实验数据的拍摄时间相近,均为2011年11月,而且桉树的纹理特征在谷歌高分辨率影像中十分明显,因此,所选样本验证点的属性其正确性可以保证。
2 结果与分析
2.1 分类结果
利用面向对象分类方法和最小距离法提取桉树的结果分别如图 3-A、图3-B和图4-A、图 4-B所示。根据ArcGIS统计结果,本研究使用面向对象分类方法提取桉树种植面积为38 828.42 hm2,分别占研究区面积的 19.18%和研究区林地面积的33.64%;本研究使用最小距离法提取桉树种植面积为30 723.04 hm2,分别占研究区面积的15.17%和研究区林地面积的28.97%。从提取结果的空间分布可以看出,使用面向对象分类方法提取桉树信息,主要分布于高要市境内,特别是南部丘陵地区种有大面积桉树,而肇庆市市辖区桉树种植面积较少,境内仅西北丘陵地区及南部丘陵地区种有少量桉树。使用最小距离法提取桉树信息,研究区内桉树分布均匀,没有出现大面积成片桉树林,特别是高要市南部地区,桉树种植面积明显少于面向对象分类方法提取的桉树种植面积。
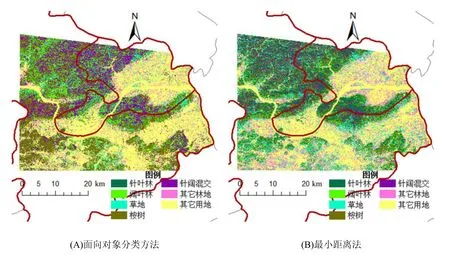
图3 分类结果
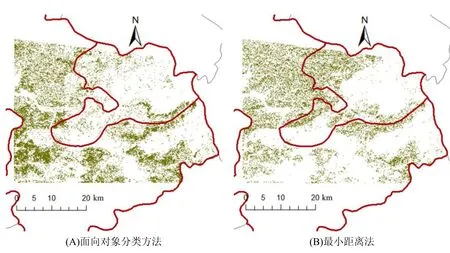
图4 桉树分类提取结果

表1 面向对象分类方法精度评价
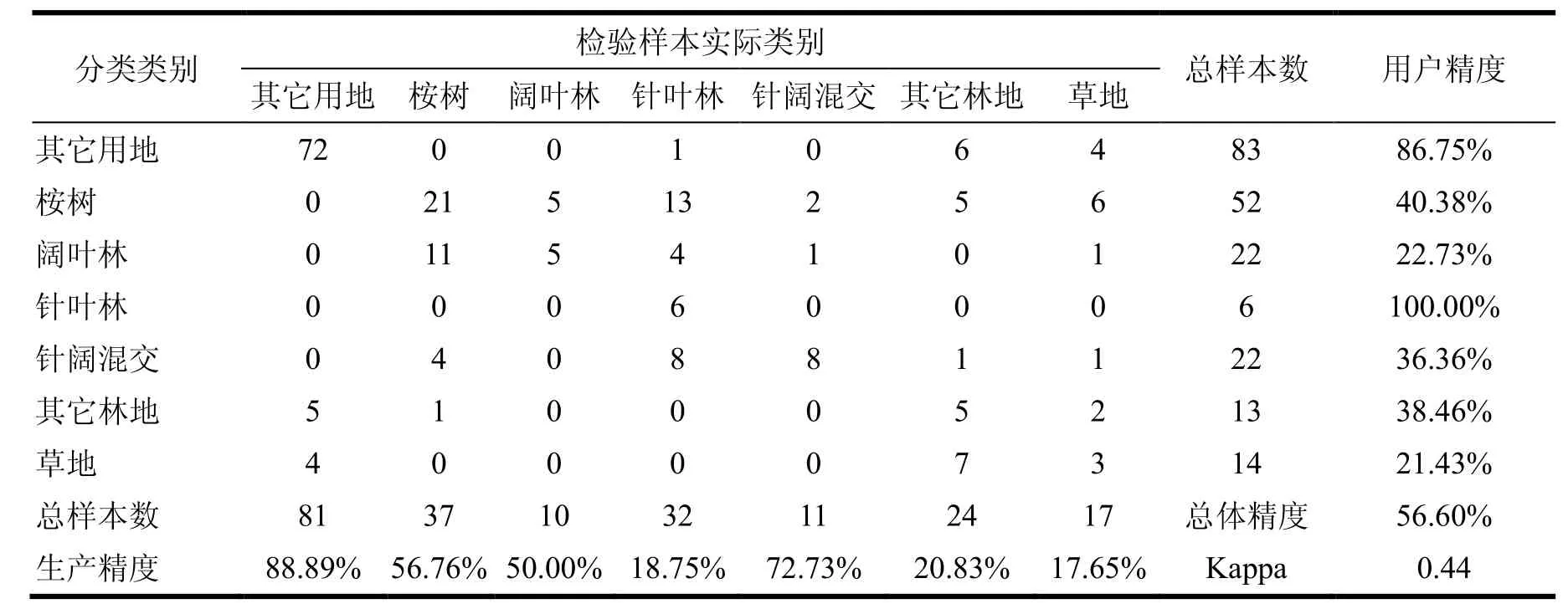
表2 最小距离法精度评价
2.2 精度检验
利用Excel统计功能,构建样本验证点的混淆矩阵,计算两种分类方法的分类精度以及Kappa系数(表1、表2)。根据评价结果显示:面向对象分类方法中,影像分类的总体精度为82.08%,Kappa系数为0.74;最小距离法中,影像分类的总体精度为56.60%,Kappa系数为0.44。
将面向对象分类结果与最小距离法进行对比(表3),使用面向对象分类方法提取桉树,其生产精度和用户精度均为78.85%,远高于使用最小距离法提取桉树的生产精度 56.76%和用户精度 40.38%,相差20%以上;比较两种分类方法的总体精度,面向对象分类方法的总体精度 82.08%远高于最小距离法的总体精度56.60%,同样高出20%以上。由此可见,相比于基于像元的最小距离法,使用面向对象分类方法提取桉树,能够取得不错的效果。
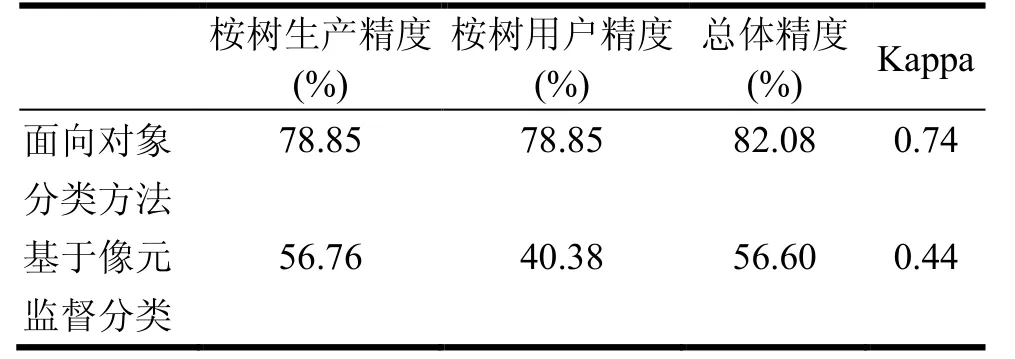
表3 桉树提取精度对比
桉树、阔叶林等林地信息的样本对象特征比较相近,对象特征值重叠度较高,在分类过程中,容易造成“同谱异物”或“同物异谱”错误的发生。根据评价结果(表1、表2)显示,利用面向对象分类方法对影像解译时,所选取的52个桉树样本验证点,41个正确分类为桉树,11个被错分为其它类别,而利用最小距离法对影像解译时,所选取的52个桉树样本验证点,只有21个正确分类为桉树。由此可见,虽然使用面向对象方法分类不能完全避免“同物异谱”等错误的发生,但是相比于最小距离法,隶属度函数法与最邻近法相结合的面向对象分类方法,能够有效地减少此类错误的发生,提高分类精度。
桉树属于阔叶林的一种,根据本研究所选的对象特征(光谱特征),桉树的对象特征与阔叶林、针阔混交林、针叶林的对象特征的重叠度依次减小,桉树错分为阔叶林的可能性最大,针阔混交林的可能性次之,针叶林的可能性最小。根据结果(表1、表2)显示,使用面向对象分类方法进行解译,桉树错分为这3种林地信息个数中,样本验证点错分为阔叶林的个数最多,针阔混交林次之,针叶林最少,与本研究根据地类之间对象特征的重叠度推测的结果相似。而使用最小距离法进行解译,桉树错分为这3种林地信息个数中,样本验证点错分为针叶林的个数最多(13个),阔叶林次之(5个),针阔混交林最少(2个),与本研究之前推测的结果完全不同。由此可见,对高分辨率遥感影像进行桉树提取时,使用隶属度函数法与最邻近法相结合的面向对象分类方法,不仅提取效果好,而且相比于最小距离法,其稳定性更好。
面向对象分类方法中的最邻近法,进行影像分类时,由待分类对象到各个样本之间的最小距离、均值距离以及通过样本对象特征空间计算得出的隶属度,共同决定待分类对象所属类别[6,16],而非仅由样本对象特征空间计算得出的隶属度决定待分类对象的所属类别,这可在一定程度上减少“同谱异物”错误分类,提高分类精度。相比之下,本研究所采用的最小距离法,其分类原理是将待分类像元划分到距离它最近距离的类别[19-20],而没有考虑待分类像元与所选样本之间的特征相似问题,致使最小距离法分类精度较低。
3 结论
(1) 对于桉树信息的提取,使用隶属度函数法与最邻近法相结合的面向对象分类方法,能够较好地提取遥感影像中的桉树空间分布信息。
(2) 相比于最小距离法,使用面向对象分类方法,不仅分类效果好,而且分类效果的稳定性优于最小距离法。
[1] 陈少雄,陈小菲.我国桉树经营的技术问题与思考[J].桉树科技,2013,30(3):52-59.
[2] 张秀英,冯学智,江洪.面向对象分类的特征空间优化[J].遥感学报,2009,13(4):664-669.
[3] 陶超,谭毅华,蔡华杰.面向对象的高分辨率遥感影像城区建筑物分级提取方法[J].测绘学报,2010,39(1):39-45.[4] 黄慧萍,吴炳方,李苗苗,等.高分辨率影像城市绿地快速提取技术与应用[J].遥感学报,2004,8(1):68-74.
[5] 韩玲玲,费鲜芸,田牧歌.面向对象的泰安市城市附属绿地信息提取[J].淮海工学院学报(自然科学版),2012,21(3):43-47.
[6] 韩凝,张秀英,王小明,等.基于面向对象的IKONOS影像香榧树分布信息提取研究[J].浙江大学学报(农业与生命科学版),2009,35(6):670-676.
[7] 陈燕丽,莫伟华,莫建飞,等.基于面向对象分类的南方水稻种植面积提取方法[J].遥感技术与应用,2011,26(2):163-168.
[8] 岁秀珍,阮仁宗,马荣华,等.面向对象的对尺度水体信息提取[J].地理空间信息,2012,10(6):72-75.
[9] 李卫国,蒋楠.基于面向对象分类的冬小麦种植面积提取[J].麦类作物学报,2012,32(4):701-705.
[10] 王启田,林祥国,王志军,等.利用面向对象分类方法提取冬小麦种植面积的研究[J].测绘科学,2008,33(2):143-146.
[11] 范磊,程永政,王来刚,等.基于多尺度分割的面向对象分类方法提取冬小麦种植面积[J].中国农业资源与区划,2010,31(6):44-51.
[12] Maire G,Marsden C,Verhoef W,et al.Leaf area index estimation with MODIS reflectance time series and model inversion during full rotations of Eucalyptus plantations[J].Remote Sensing of Environment,2011,115(2):586-599.
[13] Zhou J,Proisy C,Descombes X,et al.Mapping local density of young Eucalyptus plantations by individual tree detection in high spatial resolution satellite images[J].Forest Ecology and Management,2013(301):129-141.
[14] 付晓,王学军,韩爱惠,等.纸浆源地桉树资源遥感动态监测与分析[J].北京林业大学学报,2008,30(增刊1):89-93.
[15] 牟智慧,杨广斌.基于 TM 影像面向对象的桉树信息提取[J].林业资源管理,2014(2):119-125.
[16] 苏簪铀,邱炳文,陈崇成.基于面向对象分类技术的景观信息提取研究[J].遥感应用,2009,10(2):42-46.
[17] 于欢,张树清,孔博,等.面向对象遥感影像分类的最优分割尺度选择研究[J].中国图像图形学报,2010,15(2):352-360.
[18] Definients Image GmbH.ecognition User Guide[M].Germany:2004.
[19] 赵春霞,钱乐祥.遥感影像监督分类与非监督分类的比较[J].河南大学学报(自然科学版),2004,34(3):90-93.
[20] 闫琰,董秀兰,李燕.基于 ENVI的遥感图像监督分类方法比较研究[J].北京测绘,2011,3(4):14-16.
