内襟翼运动机构多体动力学仿真分析
2014-12-11刘锦涛
刘锦涛
(上海飞机设计研究院飞控系统设计研究部高升力系统室,上海 200125)
内襟翼运动机构多体动力学仿真分析
刘锦涛
(上海飞机设计研究院飞控系统设计研究部高升力系统室,上海 200125)
本文在LMS Virtual.Lab Motion平台上建立了飞机内襟翼运动机构多体运动学和动力学仿真分析模式,通过仿真模型的分析结果,意在说明对飞机内襟翼等大型复杂运动结构建立多体动力学仿真模型的流程及方法,为下一步进行大型复杂运动机构运动学及动力学可靠性的分析和探讨提供计算仿真模型的依据。
襟翼运动机构 Virtual.Lab Motion 多体动力学 仿真分析
现代飞机为了增加升力提高机动性,减小大迎角下失速速度,提高低速飞行时的升力,改善起飞和着陆性能,在机翼前、后缘上布置了增升装置。其中位于机翼后缘的襟翼,通过传动装置绕其转轴作向后直线或圆弧曲线运动,以扩大机翼的面积和弯度,达到增加升力和控制阻力的目的。但由于襟翼运动形式较为复杂,其内外襟翼的运动转轴不一样,一般CAD软件无法准确的计算其传动关系,因此必须利用动力学仿真软件创建三维空间动力学仿真模型,进行仿真分析。
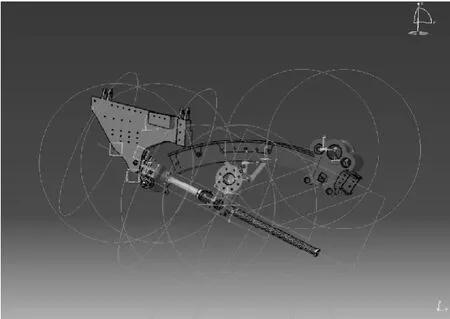
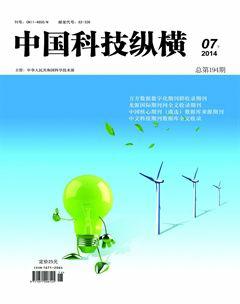
图1 内襟翼运动机构部分视图
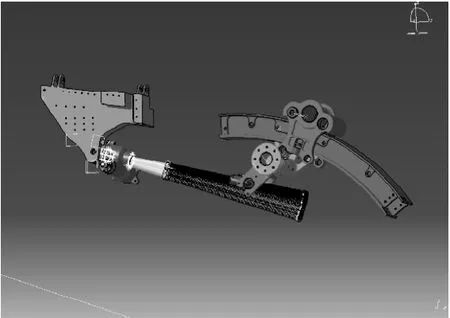
图2 襟翼作动器运动轨迹
1 内襟翼连接关系和边界条件分析
由于内襟翼的结构复杂性,需要在LMS Virtual.Lab Motion平台上将CAD模型进行转换,使得该模型包含多个part部分,以便重新装配这些部件并进行运动学及动力学仿真。这些部件分别为:滑轮架整体、滑轨和襟翼整体、滑轮架上下各4个滚轮以及侧面沿滑轨移动方向各1个滚轮。同时,为了更加合理的描述内襟翼的边界条件,增加了螺旋作动器机构,该机构由丝杠和螺旋作动筒组成。在LMS Virtual.Lab Motion平台上给定各个部件的连接关系和边界条件:
(1)机身与螺旋作动器机构1:螺旋作动器1通过一个转动副(Revolute Joint)铰接在机身上。
(2)螺旋作动器机构1与滑轨和襟翼的接头:将螺旋作动器机构1中的作动筒与滑轨和襟翼的接头采用一个转动副(Revolute Joint)进行连接。在螺旋作动器机构内部,作动器通过一个旋转副(Revolute Joint)与丝杠进行连接;丝杠与作动筒之间的连接采用转动副(screw joint),这样,丝杠受到一个铰链驱动使得作动筒向前运动,从而带动滑轨运动。
(3)滑轨与滚轮:滑轨在运动过程中与滚轮产生接触,针对不同的处理模型,滑轨与滚轮之间采用不同的接触模型。
(4)滚轮与滑轨架:8个滚轮与滑轨架各自通过一个转动副(Revolute Joint)与滑轨架进行连接。每个滚轮在受到来自滑轨运动时产生的接触力后能绕各自的转动副发生转动,滚轮的主要目的是为了保证滑轨的运动方向,滚轮之间的相互距离对滑轨的运动过程有一定影响,因此在模型中考虑滚轮间距的作用。
(5)滑轨架与机身:滑轨架固定了机身上,滑轨架部件的定义中Fix to ground设置为true。
(6)滑轨与襟翼:滑轨与襟翼中间通过两个接头进行连接,在全刚体模型中,滑轨与襟翼视为一个part,但处理过程中将滑轨与襟翼进行分割,主要为了方便对滑轨和襟翼物理模型进行不同方式的处理,滑轨与襟翼之间采用固接(Bracket joint)。
(7)机身与螺旋作动器机构2:如同螺旋作动器机构1,将螺旋作动器2通过一个转动副(Revolute Joint)铰接在机身上。
(8)螺旋作动器机构2与襟翼:将螺旋作动器机构2中的作动筒与滑轨采用一个转动副(Revolute Joint)进行连接,螺旋作动器机构2的工作原理如机构1,通过丝杆运动驱动襟翼运动。
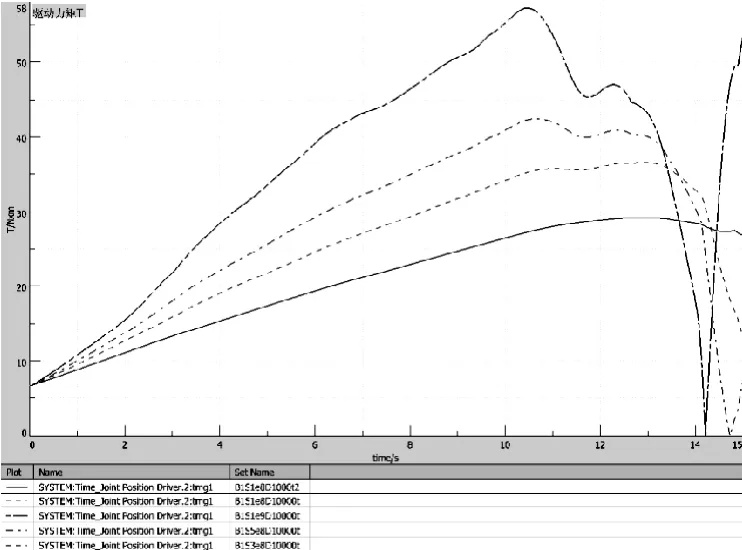
图3 驱动力矩曲线

图4 滚轮接触力曲线
(9)襟翼与机身:襟翼通过一个转动副(Revolute Joint)铰接在机身上,飞机在飞行过程中,由于受到气流等时变因素的影响,使得飞机襟翼位置也会随时间发生变化,因此转动副的位置在模拟过程中应该随时间发生变化。
2 仿真算例
在模拟过程中,整个襟翼运动机构的运动由丝杠的运动进行驱动。模型中的驱动设置采用Joint Position Driver对丝杠与螺旋作动器之间的转动副施加驱动力,设置为匀速转动,转速800转/分钟,作动筒前进0.9mm /每转。图1给出了内襟翼运动机构的部件以及连接关系。
3 仿真结果及分析
通过应用LMS Virtual.Lab Motion软件建立了考虑滑轨和滚轮之间刚性接触的内襟翼运动机构运动学和动力学分析模型。此模型中滑轨架上下8个滚轮和滑轨之间存在刚性接触力,模型中采用CAD接触进行处理。由于CAD接触模型中将几何模型划分成了网格状,求解过程将引入近似解,几何参数的设置势必会影响计算的时间和精度。为了提高计算精度和节省计算时间,在该模型中,滚轮和滑轨的几何参数中输入选择相同的参数值。
在Virtual.Lab Motion中,根据设置的初始条件、约束条件、驱动和摩擦力(矩)等,通过设置衬套力等参数设置,可以进行襟翼运动机构的动力学仿真,得到内襟翼运动机构的运动轨迹(图2),以及丝杠的驱动力矩,滚轮和滑轨之间的接触力等随时间的变化曲线(图3、图4)。给出的结果能初步分析襟翼的运动规律,包括结构在运动过程中载荷变化关系,以及各部件的运动位移、速度以及加速度的大小和方向等。
从这些关系可以看出,仅仅研究各构件刚性运动之间的相互作用及其对系统动力学行为的影响,该襟翼机构的运动和载荷变化规律就已经十分复杂。通过更详细的部件细化,建立各运动部件的仿真分析模型可以给出运动机构的大致运动规律,为襟缝翼控制系统的运动机构分析提供了参考。要说明的是,模型设置参数有些是按照经验取值,需经实测数据校正,并作进一步的细化分析,但仿真中得到的一些趋势性的结果仍可作为后续工作的参考。
4 结语
本文在LMS Virtual.Lab Motion平台上建立了飞机内襟翼运动机构多体运动学和动力学仿真分析模式,结合襟翼运动机构的刚柔耦合特点,讨论了利用LMS Virtual.Lab Motion软件对飞机内襟翼等大型复杂运动结构建立多体动力学仿真模型的流程及方法,为进一步研究更符合工程实际的机构运动学和动力学仿真模型提供了依据。
[1]万晓峰,刘岚.LMS Virtual.Lab Motion入门与提高.西安:西北工业大学出版社,2010.
[2]LMS international, LMS Virtual. Lab online help.