微观航母之着航指挥官与自动着航系统
2014-12-10希弦
希弦


斜角甲板与光学助降系统出现之前,着舰指挥官(或译作“看舰信号官”,Landing Signal Officer,LSO)一直都是航母甲板上扎眼的角色。他们衣着古怪,或是荧光艳丽的工作服,或是太平洋炎热战场下的赤膊上阵,他们站在舰艉,向准备着舰的飞机挥舞着网球拍似的信号板,或是旗语信号,或是模仿飞机的姿态。他们颇具个人特色的指挥引导技艺,不仅保证了航母舰载机回收作业顺畅,更是默默地一次次拯救着飞行员的生命。特别是在海上的夜暗、能见度不良的条件下。
LSO着舰指挥官
在航母刚出世的上世纪20年代,飞机在航母上的起降比现在尚属容易些。这是因为当时的舰载机主要还是双翼飞机,双翼飞机有更大的机翼面积,升力也更大,在降落进场时的速度可以非常低,可以降到74千米/小时左右的慢速。加之当时飞机的结构并不复杂,没有复杂的气动力控制面,操控上相对容易些,只需利用尾翼升降舵调整高度,就能将飞机平缓轻柔地降落到航母甲板上。但驾驶双翼机的飞行员也会因机翼立柱的遮挡,使前向视野不佳,不易掌握自身与甲板的相对位置,所以当时能在航母上驾机起降的仍只是技能高超的少数。
1922年3月20日,美国海军在“木星”号运煤船的基础上改装而成的CV-1“兰利”号航母正式入役。作为美国海军的第一艘航母,“兰利”号服役后主要任务就是开展舰载机的训练以及为航母的运行和操作积累经验,基本的舰载机起降作业自然是重点内容。“兰利”号在同年10月先后进行了舰载机的首次起飞着舰试验,在11月还使用压缩空气弹射器成功进行了舰载机的弹射起飞试验。通过“兰利”号对航母与舰载机的应用,不断摸索的美国人自然也会遇到上述舰载机着舰时飞行员视线不佳、不利于安全平稳着舰的问题,并最终由“兰利”号的执行官、副舰长肯尼斯惠廷(Kenneth Whiting)中校解决了这个问题。
当时“兰利”号上进行飞机着舰降落作业时,肯尼斯·惠廷都会使用一部手摇式摄影机拍摄记录下飞机的每一次着舰过程。站在“兰利”号舰艉飞行甲板左舷角落的他,可以非常清楚地观察到飞行员从飞机驾驶座上无法看到的降落时飞机的触地高度,因此有时他会以肢体动作向进场中的飞行员们发出信号,提醒他们飞得过高或过低等。飞行员们发现,甲板上的惠廷以肢体动作发出的信号,对于他们修正降落时的飞机进场轨迹十分有帮助,于是这种做法便被进一步发展为由LSO着舰指挥官专何此职,并成为美国海军航母舰载机正规降落程序中的重要一部分。
LSO的专用作业平台是在舰艉左舷处,面向进场着舰的飞机,一般由经验丰富的飞行员担任,由他们来判断降落飞机的进场操作是否适当,并适时地向飞行员发出各种标准化的信号手势,建议飞行员修正进场速度、航向、下滑角度,关闭发动机油门,或是拉起复飞等。最初LSO发出信号的方式只是使用手势,后来为了让飞行员能更清楚地看见信号,便改以手持彩色信号旗未提高信号的能见度。不过由于信号旗容易因风势而影响到能见度,后来便改以球拍状的彩色信号板来替代。
1925年随着美国海军第一支专为上舰作战而组建的航空兵中队VF-2在圣迭戈外海的“兰利”号上完成夜间起降训练,舰载机的夜间着舰也逐渐成为美国海军所有舰载机飞行员必备的训练课目。虽然训练中要求的夜间着舰训练大都是在明亮的满月,或是日落时分进行,但对飞行员来说仍是不小的挑战。对于在夜间执行降落引导作业的LSO来说也是不小的挑战。LSO只能凭着目视到的飞机航行信号灯颜色变化与听到的发动机螺旋桨的声音,来判断进场飞机的高度与速度,作业的难度远远高于白天。
30年代中期,随着航空技术的进步、飞机性能的显著提升,新一代全金属单翼机的速度性能更佳,前向视野更好,但同时其失速速度与降落进场速度也随之加大,操纵变得更复杂也更不易在航母上着舰降落。另外,封闭式座舱在减少飞行阻力的同时,也将飞行员与外部环境隔绝,飞行员无法像以前驾驶开放式座舱飞机那样直接感知外界情况,对飞行员的操纵技能提出了更高要求,也进一步提高了LSO在舰载机着舰回收作业中的作用。进入二战后,随着美国海军规模大举扩张,大量新飞行员的征募,LSO的需求也随之大幅增加。LSO对于战前那些长期进行起降训练、经验丰富的老飞行员来说,或许还只是提供辅助着舰建议,但对于缺乏经验的新飞行员来说,必须在LSO的引导下才能安全地完成航母上的降落。
随着舰载机飞行性能的提升,二战中美国海军LSO的作业装备也在做些许改进。此前使用的圆球拍状信号板,换成了上面挂着横条布条的新型球拍状信号板,挂着的布条不仅可以提高明视度,还可在强风吹拂下顺着风摆动,保证LSO仍能有效握持住。另外,LSO的身后还增设了帆布制挡风板,不仅可以抵消强风对LSO作业造成的不便,也可让身着卡其服或明亮颜色连体服的LSO与深色背景形成反差,指挥引导动作更为突出醒目。而随着战时夜间降落频率的增加,美国海军也发展了针对夜间降落的LSO着舰引导作业模式。LSO改拿60-90厘米长的霓虹管发光棒或闪光灯,取代白天使用的信号板,以便飞行员能看清信号。LSO则是通过观察舰载机机翼卜的钉、黄(白)、绿三色航行信号灯来判断进场飞机的高度。
二战时期的美国航母上,每艘通常会配置1名LSO与1名助理LSO,有些还会配属第3名。在航母降落任务中,LSO与飞行员们共同协作来完成降落作业。LSO不仅有着“飞行员”的角色,需要熟悉各个机型的性能特点、飞行员驾机进场时面临的种种问题,并掌握着舰困难的解决之道,而且还有着“教导员”的角色,必须认识舰上每一名飞行员,知道他们的飞行癖好操作习惯。LSO对舰载机的着舰程序越熟悉,对驾机的飞行员越熟悉,也就越能给在降落过程中遇到麻烦的飞行员提供适当的建议,安全地引导他们着航。LSO除了要对每个架次的降落负责,还要通观全局控制整个着舰回收作业的间隔,确保作业过程的平顺。所以说,LSO着舰指挥官是一个需要高度集中注意力与临机应变能力的岗位。指挥作业中的任何粗心大意都会导致灾难,每次引导都必须十分精确,确保进场飞机以理想的速度、下滑角,将航向对准甲板中线,平安回家。endprint
英国的DLCO甲板降落管制官
较于美国海军的LSO人工指挥引导机制,作为航母创始国的英国,由于航母运用观念与军种政策的差异在这方面相对落后7许久。在1918年时英国皇家海军航空队与原属陆军的皇冢飞行队一同被划入了新成立的皇家空军的编制,英国海军航空力量的发展进入了低潮期。即便是到了二三十年代,英国海军的航母力量得到了发展壮大,但在航母与舰载机的编成上仍处于分裂的状态,皇家海军只是负责航母,飞机与飞行员则是由皇家空军的舰队航空兵来负责。双方的协同合作难免会存在着问题,难以协调一致。
到了20世纪30年代后期,欧洲局势日趋紧张,各国的军事力量也在不断扩张,英国的舰队航空兵编制规模也在扩充。这些短期训练下的新飞行员由于操纵技能和飞行经验的不足,独立完成航母上的着舰难度很大,造成航母上舰载机降落的失事率居高不下。因此,在舰队航空兵于1939年回归英国皇家海军的同时,皇家海军决定仿效美国海军的LSO人工导引降落机制,由专职的甲板降落管制官(Deck IandinG Control Officers,DLCO)在航母甲板上指挥引导飞行员的着舰降落。
呈家海军的DLCO与美国海军中的LSO一样,一般由有着丰富航母作业经验的飞行员来担任,利用手持球拍状的信号板向飞行员发出指示信号。DLCO执勤时的位置也是在舰艉左舷的飞行甲板外侧,负责监看舰载机降落过程中最后的进场阶段,并适时地以信号板手势向飞行员发出诸如“向左”、“向右”、“太高”、“太低”等指示信号,引导飞行员修正航向、速度与姿态,确保飞机能够以正确的下滑角与速度进场,最后钩住甲板上的一条拦阻索来使飞机制动停下。
英美两国的人工指挥引导降落机制,除了名称不同外,在降落进场时还有着细微差别。英国海军航母的降落采用较陡峭的下降进场路径,DLCO以将信号板往下挥的方式,向飞行员表示降低高度,若将信号板举起则代表要求飞行员拉高:美国海军则采用较平缓的进场路径,LSO以高举信号板的方式,向飞行员表示高度过高必须降低高度。两者在通知飞行员改变高度的手势信号上刚好相反。除了进场方式与指挥信号英美稍有差异外,在降落进场指引程序上二者大致相同。
随着战后喷气机时代的来临,航母舰载机着舰速度与着舰难度的增加,仅靠LSO的人工指挥引导已不能适应新时期的要求,因此各种光学助降系统开始在航母上出现(见本刊2014年11期《微观航母之光学助降系统》一文)。差不多与英国研制镜式着航辅助系统的同时期,美国开始了以着舰引导雷达为基础的自动着舰系统的研发。不过与光学助降系统一样,这种以雷达为基础的助降系统的出现也并没能让LSO“下岗”。在现代航母的着舰回收作业中,LSO依旧有着不可替代的作用。
ACLS自动着舰系统
美国在1948年提出自动着舰引导的需求后,研制了以AN/SPN—10着舰引导雷达为核心的自动着舰系统。只不过当时限于技术,着舰引导雷达的引导精度较低,缺少着舰飞机的速度等信息,虽名义上是自动着舰系统,但实际上不具备引导舰载机全自动着舰的功能。20世纪60年代末,AN/SPN-10的改进开AN/SPN-42着舰引导雷达开始安装在航母上,这种自动着舰引导功能的设想才有了雏形。
AN/SPN-42着舰引导雷达可在舰艉7.5~15千米作用距离上空形成宽25°、高1.5°、纵深360米的搜索区域,当准备着舰的舰载机进入该区域后,雷达便开始持续跟踪它,测得该机相对航母的实际位置和飞行下滑状态等信息,这些信息和航母上运动检测装置测得的舰体运动信息实时传入着舰引导计算机。着舰引导计算机根据航母的运动信息预报出航母存未来航载机着舰过程中的运动姿态,然后在此基础上来确定航载机的珲想下滑轨迹。然后,将飞机当前的下滑轨迹与确定的珲想下滑轨迹进行比较,所得误差信息经导引律计算后得到舰载机高度下降速率和倾斜转弯角度等控制指令,通过数据链发送至舰载机,由舰载机上的飞行控制系统和自动油门系统来不断修正下滑轨迹,以使舰载机按照设定的理想下滑轨迹在航母上准确着舰。在1970年至1982年间,自动着舰系统的性能在4000佘次飞行试验中得到了验证,可大大提高舰载机在航母卜的着舰成功率。
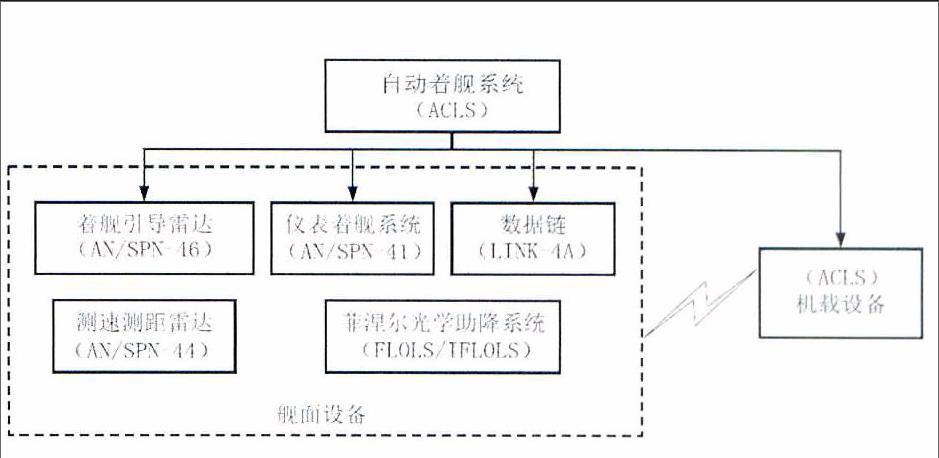
20世纪80年代初,美国在AN/SPN-42着舰引导雷达的基础上,研制了改进型号AN/SPN-46,并于1984年由F/A-18A战斗机进行了新一代自动着舰引导系统的性能验证试验,理论上自动着舰系统(Auto Carriel Landling Svstem,ACLS)可以使舰载机全天候盲降,不论白天黑夜亦或雨天雾天都能够修冉见载机以几十秒的时间间隔不断地降落在狭窄的航母甲板上。因此这种系统也称为“全天候航母着舰系统”(All-Weather Carri-er Landing Svslem,AWCLS)。
这种自动着舰系统的结构以AN/SPN-46着舰引导雷达为主,以用于仪表着舰系统的AN/SPN-41雷达为辅,二者构成相互独立、相互融合、相互监视的自动着舰引导体制。在通信传输的数据链上,目前自动着舰系统采用的并不是现存美国海空军大量装备的Link-16,而是上一代Link-4A型数据链。当然,随着Link-16数据链的成熟和发展,预计Link-4A会完全被Link-16户斤替代。
自动着舰系统有多种工作模式供飞行员或者着舰指挥官进行选择、切换。其中模式I是全自动着舰引导模式,它是利用数据链连接航母的飞行控制中心与准备着舰的飞机,后者的飞控系统根据前者传递来的信息进行着舰轨迹的修正来完成自动着航。模式Ⅱ是仪表着舰模式,即所谓的半自动着舰,在这种模式下自动着舰系统与舰载机的飞控系统并不交联,而是通过仪表或者显示器向飞行员显示相关误差及修正数据,由飞行员根据这些信息未操纵飞机下滑着舰。模式Ⅲ与模式I有些共同点,在远距离由自动着舰系统将舰载机引导到光学助降系统工作范围的窗口区域后,舰载机通过光学助降系统的引导来完成最后的着舰。最后一种就是人工模式了。由着舰指挥官通过着舰引导雷达的信息,对舰载机位置、方位和高低角误差等信息进行确定,然后用语音告诉飞行员进行修正,直到进入光学助降系统的工作范围。自动着舰系统的这四种模式中,全自动着舰模式在绝大部分情况下并不使用,仅在极端恶劣海况下才用。后三种模式才是常用的着舰引导模式,特别是Ⅱ、Ⅲ模式对舰载机大幅降低着舰事故率有着明显作用。endprint
理论上,在自动着舰系统的帮助下,舰载机可以在云雾高度和能见度为零,甲板纵摇1.5°、横摇5°,尾部甲板升沉1.5米的恶劣海况下,顺利降落到甲板上,着舰精度可以达到纵向正负13米、横向误差3米的范围内,可大幅提高舰载机在恶劣气象条件下的降落安全性。但在该系统投入使用后的几十年里,美航母舰载机的着舰回收作业很大程度上还是依靠飞行员的不断训练,依靠与着舰指挥官的协作来完成。而基于着舰引导雷达的自动着舰系统,其“理论”上的性能未充分发挥的最主要原因还是受舰载机和着舰引导雷达这两方面的性能所限,未能充分地利用飞行指令来实现舰载机下滑着舰过程中的轨迹精确控制。
舰载机着舰下滑过程中,飞机主要依靠尾翼不断进行小范围偏转来调整下滑轨迹,但由于气动舵面存在着滞后以及速度低时不能产生足够的操纵力,因此不能对自动着舰系统发出的指令作出快速响应。另一方面,目前的自动着舰系统为舰载机的降落提供的着舰精度实在略显粗糙。在舰载机着舰的最后阶段,系统不仅要修正舰体运动引起的位移,还需要克服舰艉气流对着舰轨迹的扰动影响。而在通常的着舰条件下,舰载机飞行员也可以做到这样的精度,甚至做得更好。所以说在实际的使用中,自动着舰系统并未能取代着航指挥官和光学助降系统,只是大幅提高了恶劣气象条件下航载机的降落安全性。在多数情况下自动着舰系统只是用来引导舰载机进入正确的着舰航线,舰载机在下滑轨迹尽头的调整修正还得依靠飞行员自己的技术经验和着舰指挥官的引导。但这都不能否定自动着舰系统的出现在很大程度上减轻了飞行员和着舰指挥官的负担,提高了舰载机着舰的安全性、准确性以及自动化程度。
JPALS联合精密进场和着陆系统
随着CPS技术的发展,基于GPS导航卫星的着舰引导系统应运而生。1996年,由美国国防部牵头、陆海空三军共同参与的下一代基于CPS的着舰(着陆)引导系统JPALS(Jomt Precision Approach fllldLanding System,联合精密进场和着陆系统)开始建设。JPALS系统旨在建设一个支持陆军、海军、空军、海军陆战队多兵种以及民航之间可互操作的,精确的、可快速部署、易于维护的,不受天气和地形影响的,支持有人驾驶飞机和无人机的,可在陆基着陆阶段和海基飞行全阶段运行的差分GPS着陆引导系统。在JPALS系统的开发上,应空军和海军的不同需求,JpALS发展了陆基和海基两个不同的系统
由于JPALS系统存在着诸多各方面的技术问题,严重影响了研制进度,直到2007年才宣布初步完成关键技术研究。由于美国海军对航母平台的飞机着舰引导应用需求更为迫切,因此海基JPALS系统的研究进度和计划节点均较陆基JPALS系统更快。2008年7月美国海军航空系统司令部将海基JPALS系统的研发与试验项目的2.32亿美元合同授予了雷锡恩公司,2013年年底“罗斯福”号航母展开了JPALS系统的初步测试。按照美国海军的发展规划,该系统不久将展开小批量生产,并在F/A-18E/F、F-35和无人机等多型飞机上进行飞行试验和设备安装。预计在2025年前后,JALS将全面替代现役的“塔康”战术空中导航系统和基于着舰引导雷达的自动着舰系统。
海基JPALS系统由舰载系统和机载系统两部分构成。其中舰载系统称之为基准站,为机载系统提供载航的位置、速度、姿态、姿态变化、差分修正数据等信息。机载系统一方面通过CPS解算出自身精确位置等信息,一方面通过数据链通信设备接收航载系统发送的下滑轨迹等信息,然后进行综合处理,获得高精度的差分定位结果以及机舰相对下滑轨迹参数,并将数据提供给飞行控制计算机进行进场的着舰引导控制。
海基JPALS系统通过双向数据通信来实现在任何条件下航母200海里范围内的全覆盖,并在该区域内可实现5米的水平引导精度。通过空中管制雷达/着舰引导雷达和敌我识别系统实现航母50海里控制区域内的覆羔,在这区域内JPALS的水平引导精度为2米。当舰载机进入10海里范围内时,JPALs提供的三维引导精度达到10-15厘米,同时通过下行数据链为航母提供用于进场监视的数据。因此,凭借JPALS系统10~15厚米的着舰引导精度,再辅以舰载机发动机推力矢量的机动灵活,舰载机的着舰精确程度和安全性将获得质的提升。依靠各类数据的处理分析、自动化的控制,来精确地完成全天候条件下的全程自动化着舰,终于成为了现实的可能。
【编辑/山水]endprint
