开关磁阻电机分数阶PI调速控制器设计
2014-12-10文建平曹军义
文建平,曹军义
(1.西安科技大学 机械工程学院,陕西 西安 710054;2.西安交通大学 机械工程学院,陕西 西安 710049)
0 引言
开关磁阻电机体积小、结构简单、不需要稀土材料、调速范围宽且在调速范围内都有高的效率、启动电流小、有较强的过载启动能力的特点,使采用开关磁阻电机的驱动系统在电动汽车、家用电器、纺织机械等领域得到了广泛关注[1]。
但开关磁阻电机为双凸极可变磁阻电机,自身结构具有磁路饱和非线性、可控参数多等特点,增加了开关磁阻电机调速系统的控制难度,基于线性模型的传统PID控制方式对动态非线性开关磁阻电机的调速系统已难以获得很好的性能,而开关磁阻电机的数学线性模型是在忽略许多非线性因素的基础上建立,与实际运行状况差异较大及定量计算误差较大,适于定性分析。准线性模型的建立是将磁化曲线分段线性化处理及忽略相间耦合,基于该模型的计算仍存在较大误差,非线性模型较准确地表示了开关磁阻电机的电磁特性,但复杂的非线性模型要求控制器有更高的处理速度[2]。
传统PID控制对于非线性特性的开关磁阻电机调速控制难以取得理想的效果,但其简单易于实现的特点使得PID调速控制得到广泛应用,为了改善其控制性能,文献[3,4]将模糊控制理论与 PID控制结合,设计了模糊PID控制方法。文献[5]在PID控制基础上应用模糊控制、免疫机理和自适应PSD控制律,设计了开关磁阻电机的智能控制。文献[6]将神经网络与常规PID控制结合,建立神经网络PID控制器。文献[7]采用非线性状态反馈控制律的自抗扰控制技术,实现了自抗扰控制器。
本文中基于简单易实现的PI控制,建立开关磁阻电机的分数阶PI调速控制策略。分数阶微积分拓展了整数阶PI调节的参数取值范围,使系统参数有更广的稳定域,并设计了分数阶积分的离散化算法,使其适应非线性开关磁阻电机,获得好的控制特性。
1 SRM的数学模型
根据磁阻最小原理,开关磁阻电机的转矩是由磁路选择最小磁阻的趋势产生的,而磁路的非线性,可根据磁共能来计算转矩,其取决于转子位置和绕组电流的瞬时值,为了简化模型,通常忽略磁路饱和和边缘效应,电感与电流无关,转矩可表示为:

式中,i是定子绕组电流;L是相绕组电感;θ是转子位置角。
电机的转矩与电流的方向无关,与相电感随转子位置角的变化有关,当d L/dθ为正、绕组有电流流过时,电机产生驱动转矩。控制电流的大小及转子的位置可实现电机的转矩控制。
根据力学原理,电机转矩的平衡方程式可表示为:

式中,TL是负载转矩;B是摩擦系数;J是电机系统等效转动惯量;ωr是电机机械角速度。
电机稳态运行时的电磁转矩平衡方程式为:

2 分数阶PI调速控制
2.1 分数阶微积分
分数阶微积分是微积分的统一认识,主要是相对于传统整数阶微积分而言。统一的微积分算子包括分数阶和整数阶微积分算子。可描述为[8]:

式中,a和t分别是微积分算子的积分上界和下界;α为微积分的阶数,R(α)表示实数,当α为整数时,表示整数阶微积分;当α为大于零的实数时,aDαt表示分数阶微分;当α为小于零的实数时,aDαt表示为分数阶积分。
分数阶微积分把微积分的阶次推广到分数领域,应用分数阶微积分理论描述的系统模型可更接近真实地反映物理对象。
2.2 分数阶PI控制器设计
在常规的PID控制器中,积分由分数阶积分来完成,即分数阶 PIαDλ控制器,用微分方程表示:

式中,u(t)是控制器的输出;Kp是比例系数;Ki是积分时间常数;Kd是微分时间常数;α是积分阶数;λ是微分阶数;e(t)是控制器输入。
分数阶控制器的连续传递函数为:

从上述的方程式(5)和(6)中可看出,分数阶微积分不同的 α、λ 取值,可获得不同类型的 PIαDλ控制器。
为了实现分数阶微积分的工程应用,需要获得分数阶PIαDλ控制器的离散数学模型,即对分数阶微积分算子进行合理的近似离散化。
在分数阶PIαDλ控制器的离散过程中,本文采用双线性变换离散化方法,计算出关于变量z的无理方程,然后通过连分数展示式对其进行近似有理化处理,获得满足控制精度要求的离散分数阶控制器,sα的离散化模型为:

式中,T为采样周期。
分数阶 PIαDλ控制器的构成如图1所示。

图 1 分数阶 PIαDλ控制器
图2给出了采用分数阶电流控制器与转速控制器的三相6/4极开关磁阻电机转速闭环调速系统的构成示意图。

图2 SRM分数阶PI调速控制
3 仿真分析
为了验证提出的控制方法的有效性,在MATLAB/Simulink环境中,建立了三相6/4极开关磁阻电机的分数阶PI调速控制模型,如图3所示。speed control和current control分别是分数阶PI速度控制器和分数阶PI电流控制器。仿真测试中,两个控制器的参数选取为:Kp=20,Ki=10,Kd=0,分数阶微积分的阶数 α=0.3,λ=0,近似有理项数为7。PWM开关信号采用电流斩波控制方式。
在仿真过程中,开关磁阻电机的开通角和关断角均为固定值,电机为Simulink中自带的模型,额定转速为3 000 r/min,额定功率为 60 kW。

图3 分数阶PI调速控制模型
对所设计的仿真模型,施加2 000 r/min的给定转速,系统在空载的条件下起动,转速响应波形如图4所示。分数阶PI调速控制下的系统转速响应过程与常规的PI调速控制相比较,响应速度更快速平稳,稳态误差也得到改善。
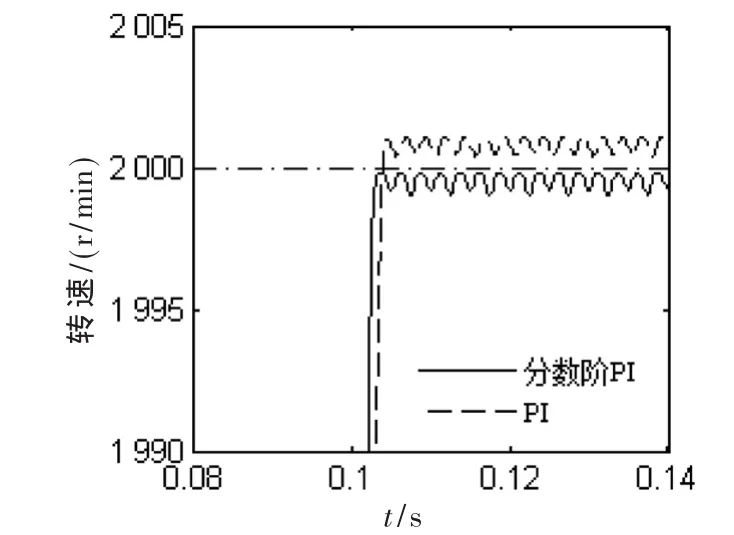
图4 空载时转速响应波形
当电机稳态运行在给定转速状态时,给系统突加50 N·m的负载转矩,电机a相电流波形如图5所示,系统的转速波形曲线如图6所示。在负载转矩突变过程中,采用分数阶PI调速控制的系统转速能快速跟踪给定转速,波动更小,系统具有较高的控制精度,相对应的系统转矩响应波形如图7所示,系统在快速跟踪给定转速时的转矩波动也得到有效改善。

图5 a相电流波形
4 结论
本文在开关磁阻电机调速系统中,将常规PI控制与分数阶微积分理论结合,建立了分数阶PI双闭环调速控制系统,通过仿真试验,对系统进行了测试,仿真结果表明了系统在空载起动以及抗负载干扰等工况下,具有好的跟踪速度及控制精度。

图6 施加负载转矩时转速响应波形

图7 转矩输出波形
[1]孟耀辉,高岩.基于 MATLAB/Simulink的开关磁阻电机控制策略仿真[J].电气自动化,2014,36(2):4-7.
[2]张云,徐衍亮,孔辉,等.电流最优的多变量静态神经网络开关磁阻电机控制[J].电工技术学报,2013,28(8):250-258.
[3]崔晓锃,石山,刘志东.基于论域自调整的模糊PID开关磁阻电机控制系统研究[J].微电机,2012,45(2):75-78.
[4]乔维德.开关磁阻电机调速控制策略的仿真研究[J].电气传动自动化,2012,34(1):19-21.
[5]林青松,杨孝敬,张聚伟.开关磁阻电机调速系统的PSD控制研究[J].电源技术,2012,36(8):1185-1187.
[6]夏长亮,王明超.基于RBF神经网络的开关磁阻电机单神经元 PID控制[J].中国电机工程学报,2008,28(8):161-165.
[7]李建忠,翟遂春,周飞,等.开关磁阻电机自抗扰控制研究[J].湖南工业大学学报,2012,26(5):37-40.
[8]KLEINZ M,OSLER T J.A child’s garden of fractional derivatives[J].The College Mathematics Journal,2000,31(2):82-88.
