具有语音提示功能的超声波倒车雷达系统的设计
2014-12-06姜长坤
张 欣,冯 雷,姜长坤
(长春工程学院电气与信息工程学院,长春130012)
0 引言
随着汽车产业的快速发展,汽车的数量也在快速增长。在享受汽车给我们带来的便利的同时,倒车事故问题也日益突出。若车后方的障碍物处于驾驶员的视觉盲区时,会对驾驶员的泊车、倒车造成不便,甚至造成事故。据调查统计,大量的汽车事故是由汽车倒车“后视不良”造成的。目前,中、高档小型汽车基本都配置了倒车雷达,倒车雷达产品的测距范围集中在0.3~3m,价格在几百元到上千元不等。出于对成本的考虑,许多经济型的小型汽车、大型货车及客车等还没有配备倒车雷达[1-2]。本文设计了一套成本低、测量精度较高、稳定性较好的倒车雷达系统。该系统利用超声波传感器测量距离,并配有语音芯片实时播报车后保险杠与障碍物距离,为驾驶员提供了明确的距离提示,提高了倒车的安全性。具有语音提示功能的超声波倒车雷达系统具有广阔的应用推广前景。
1 超声波测距原理及误差来源
超声波测距的原理是超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中遇到障碍物就立即返回来,超声波接收器收到反射波时就立即停止计时。于是利用超声波在空气中的传播速度,以及超声波在发射后遇到障碍物反射回来的时间差即可计算发射点到障碍物的实际距离,即时间差测距法。测距的公式为:

式中:L为要测量的距离长度;C为超声波在空气中的传播速度;t为超声波传播的时间差。
根据超声波测距公式(1)可知,超声波测距误差主要是由超声波的传播时间误差和传播速度误差引起的。
1)单片机选型对传播时间误差的影响。设超声波传播速度是准确的,则测量距离的传播时间差精度只要达到微秒(μs)级,就能在理论上保证测距误差小于1mm。使用的12MHz晶体作为时钟基准的STC89C52单片机定时器能方便地定时到1μs的精度,可以保证测距精度。
2)环境温度对传播速度误差的影响。超声波的传播速度主要受温度的影响,它们之间的近似关系为:

式中T为实际环境温度。
若想提高超声波测距精度,就必须对其进行温度补偿[3-4]。
3)超声波波束的入射角引起的误差。当反射波入射到探头的角度不是直角时,系统测量到的距离是障碍物与探头之间的距离,而不是与保险杠的垂直距离,这会引起测量误差。当车尾与障碍物的距离较小的时候,此误差会成为测距的主要误差来源[4]。设计中通过在汽车车尾处安装3个或以上的探头个数来减小该误差。
此外,有一部分从发射探头直接传到接收探头的直达波会干扰回波信号的检测。这种干扰可通过软件算法进行处理;反射物体表面材料的介质也会引起误差,反射物体表面是光滑的介质,比粗糙的介质测量效果更好。
2 系统设计方案及关键电路设计
系统以STC89C52单片机为核心,使用超声波传感器检测车尾与后方障碍物的距离,并使用语音芯片ISD1700进行语音播报实时距离,当距离达到一定阈值时进行声光报警。系统配有温度传感器电路测量环境温度,对超声波传播速度进行实时补偿。系统总体设计方案如图1所示。启动超声波测距时,首先由STC89C52单片机发出40kHz的脉冲串,每20个脉冲为一串,脉冲串通过超声波发射电路驱动超声波发射探头发出超声波,单片机在发送脉冲的同时定时器开始计时;超声波遇到障碍物后所产生的回波被超声波接收探头接收,其输出的正弦波经过三级放大,再经过电压比较器产生中断信号中断单片机的计时,这样就得到了超声波的传输时间,然后在中断服务程序中根据测出的时间差及温度补偿后的传播速度计算出车尾与后方障碍物的距离。中断返回后再发送下一串脉冲,并用语音芯片ISD1700播报实时的距离,当距离达到一定限度时,进行声光报警。
2.1 超声波发射及接收电路的设计[5]
超声波发射探头选用CSB40T,这里采用软件发生法产生40kHz的超声波信号,经驱动器驱动后推动探头产生超声波,电路如图2所示。利用NE555P的基电路振荡产生40kHz的超声波,R15为可调电阻,用来调节信号频率。为保证NE555P有足够的驱动能力,采用12V电源,TRIG为超声波发射控制信号,由STC89C52单片机控制。

图1 系统方案框图

图2 超声波发射电路
超声波接收器包括超声波接收探头、信号放大电路及波形变换电路3部分。超声波接收探头选用CSB40R。由于经探头变换后的正弦波电信号非常弱,因此需经放大电路放大。此外正弦波信号不能直接由单片机接收处理,因此需进行波形变换。根据超声波测距原理,单片机只需要第一个回波的时刻。超声波接收电路如图3所示。信号放大和变换采用四级运算放大器,前三级为放大器设计,后一级为比较器设计。放大电路采用单电源供电。为满足交流信号的需要,每一级的放大器均采用阻容电路进行电平偏移,即图3中的C11、C12、C18和C19,容量均为10μF,实现单电源条件下交流信号放大。
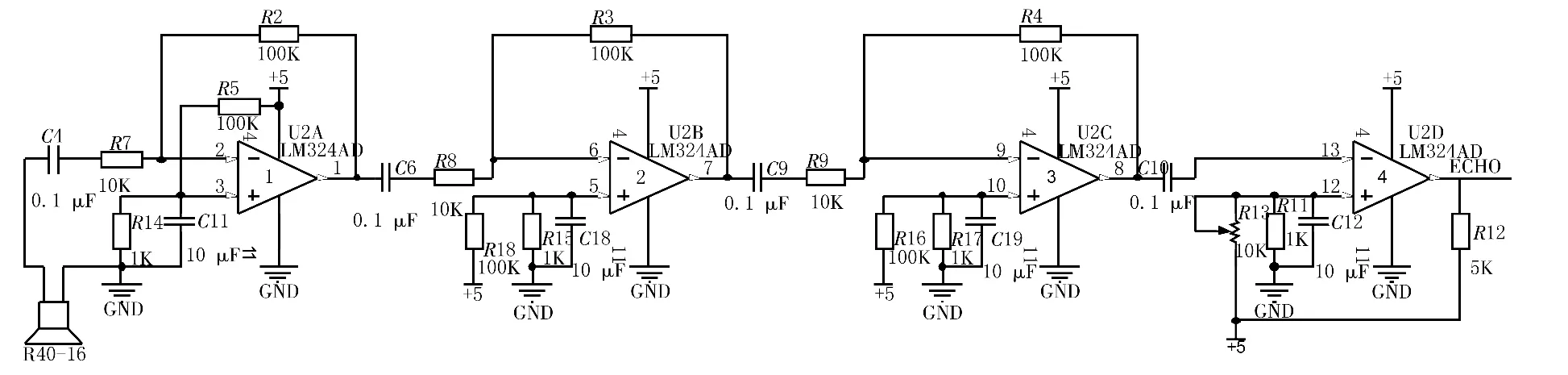
图3 超声波接收电路
2.2 温度补偿电路的设计
由于温度对声速的影响较大,为了提高系统的测量精度,需要设计温度补偿电路。这里采用单总线数字温度传感器DS18B20测量环境温度,直接输出数字量,便于单片机处理及控制,节省硬件电路。DS18B20与单片机接口电路如图4所示。DS18B20采用单总线方式和STC89C52单片机相连,即DS18B20的2脚接至STC89C52的I/O引脚,且需接一个上拉电阻。
2.3 语音播报电路的设计
本系统采用ISD1700语音芯片进行语音报警电路的设计,ISD1700系列语音芯片是一种高集成度、高性能的芯片,有较好的音质和断电存储功能,可以实现多段录音,能够满足系统要求。ISD1700语音播报电路如图5所示。单片机的P1.0接ISD1700的片选引脚/SS,控制芯片是否选通;P1.1接ISD1700的串行时钟引脚SLCK;P1.2接ISD1700串行输入引脚MOSI,从该引脚读入录放音的地址;P1.3接ISD1700的串行输出引脚MISO。
语音播报电路的主要作用是在汽车倒车过程中,为驾驶员提供语音提示,使其及时获知汽车与障碍物之间的距离。当倒车距离大于3m时,语音提示为“请放心倒车”;当倒车距离为3m、2m、1m及0.8m 时,语音提示为 “3m”、“2m”、“1m”、“0.8m”;当倒车距离小于等于0.5m时,语音提示为“危险!紧急停车”。
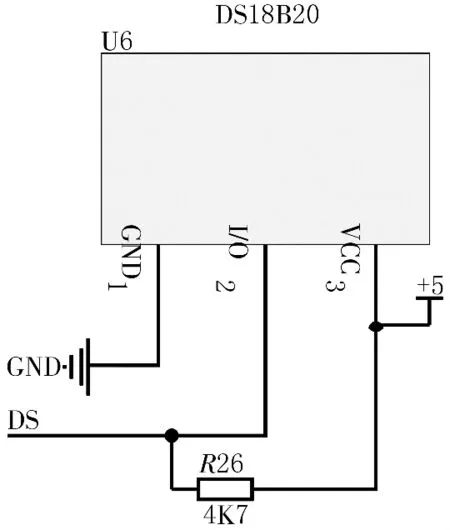
图4 温度补偿电路

图5 语音播报电路
此外系统还设计了声光报警电路、液晶显示电路及键盘电路。声光报警电路主要是配合语音播报电路,通过不同的蜂鸣声音及不同颜色的指示灯也可提示驾驶员倒车距离。液晶电路主要用于显示实时的环境温度、车尾与后方障碍物的实时距离等信息。键盘电路是为用户提供按键操作,确定系统工作在用户选定功能模式。
3 系统软件设计
由于该系统功能复杂、信息量大、程序较长,因此采用模块化程序设计方法。系统模块分为主控模块、超声波测距模块、温度补偿模块、显示模块、语音播报模块、声光报警模块及按键模块等。系统采用C语言编写程序,主程序流程图如图6所示。
4 系统性能测试
具有语音提示功能的倒车雷达系统以超声波测距传感器为主体,其中超声波发射和接收探头采用CSB40T和CSB40R,频率为40kHz,安装时保持2探头中心轴线平行并相距0.03~0.08m。超声波测距范围的最小值是由盲区决定的,为了避开超声波的余震,通过实际测量,设定最小值为0.2m。测距最大范围由超声波发射模块的功率决定,设定最大值为4m。实际系统测试数据见表1。
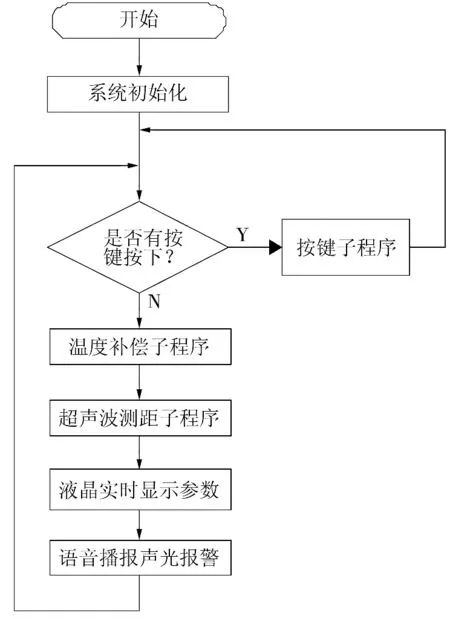
图6 主程序流程图
5 结论
根据系统测试结果可以得出以下结论:
1)系统测距范围在0.2~3.4m内满足测量精度为1%的基本要求。
2)在系统测量范围内,测距的平均绝对误差为0.015m;
3)在系统测量范围内,测距的平均相对误差为1%;
综上所述,所设计的超声波倒车雷达系统性能稳定,制作成本可限制在100元/套以内,在实验测试中取得了较好的效果。该系统能够快速、准确地计算出汽车尾部与障碍物的距离并实时显示,当达到一定危险距离时进行语音提示,实现了提高倒车安全性的目的。
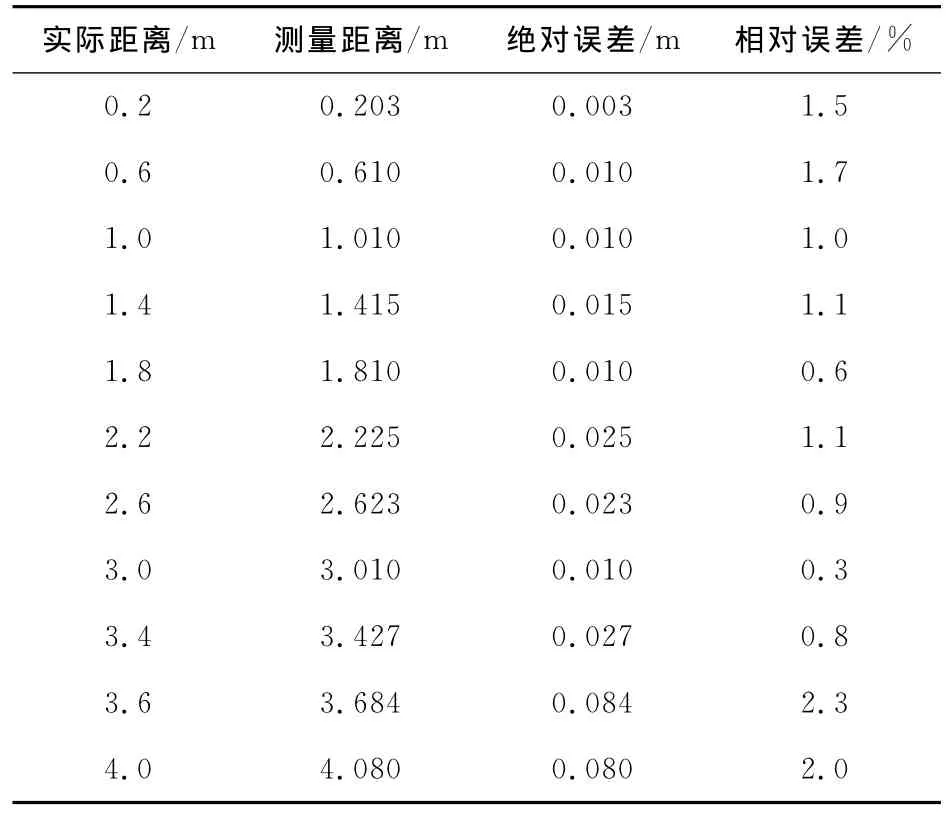
表1 系统测试
[1]秦伟,颜文俊.基于CX20106A的超声波倒车雷达设计[J].压电与声光,2011,33(1):161-164.
[2]杨旺喜,茅嘉伟,沈明明,等.基于单片机的超声波倒车雷达系统设计[J].科技信息,2014(9):12-13.
[3]张攀峰,王玉萍,张健,等.带有温度补偿的超声波测距仪的设计[J].计算机测量与控制,2012,20(6):1717-1719.
[4]赵海,张宽,朱剑,等.基于TDOA的超声波测距误差分析与改进[J].东北大学学报(自然科学版),2011,32(6):802-805.
[5]滕志军.基于超声波检测的倒车雷达设计[J].今日电子,2006(9):78-83.
