擦窗机底架应力变形对整机稳定性的影响
2014-12-04郑夕健李轶武谢正义
郑夕健,李轶武,谢正义
(沈阳建筑大学 交通与机械工程学院,辽宁 沈阳 1 1 0 16 8)
1 引 言
擦窗机的整机稳定性是一个重要的安全指标,底架是擦窗机的重要组成部分,虽然有很多对擦窗机稳定性和底架结构的研究,但关于底架结构应力变形对整机稳定性的影响的研究鲜有述及。所以本文利用理论分析与有限元分析相结合的方法,研究底架结构应力分布和变形规律对整机稳定性的影响,对擦窗机底架的设计及优化是十分必要的。
2 擦窗机整机稳定性计算
2.1 整机结构
伸缩臂式擦窗机的机体结构如图1所示,主要由行走机构、底架、回转机构、起升机构、立柱、配重、基臂、一节臂、二节臂、羊角臂头和吊篮等组成,整机机构如图1所示。可以看到,该型号擦窗机吊臂为2+1式,利用行走机构的移动,回转盘的转动,节臂的伸缩以及臂头钢丝绳的缩放,使篮体到达所需的工作平面,从而进行外墙维护。

图1 擦窗机整机结构图
2.2 抗倾翻系数计算
根据GB 19154-2003《擦窗机》中对整机倾翻性的要求,包含工作状态、正常停机状态和暴风环境3种工况;选择工况为工作状态,额定载荷600kg,物料起吊载荷250kg,风压250N/m2,对擦窗机0°、45°和90°三个工作位置进行稳定性分析,利用稳定系数法对擦窗机的倾翻性进行计算,计算公式为K=(M抗+M0)/M倾,其中K为抗倾翻系数,M抗为抗倾翻力矩,M0为安全装置提供的抗倾翻力矩,M倾为最大倾翻力矩。各工作位置及最不利支点(线)如图2所示,0°位置的倾翻线为AD连线,45°位置的倾翻线为AD连线,90°的倾翻线为CD连线。分别计算工作状态下,3个工作位置擦窗机的倾翻力矩、抗倾翻力矩和抗倾翻系数,计算结果见表1。

图2 3种典型工作位置示意图

表1 工作状态下各工作位置擦窗机倾翻性
从表1可以看出,在90°工作位置擦窗机抗倾翻系数最小,同时90°工作位置受到的倾翻力矩最大,所以选择90°工作位置研究擦窗机整体稳定性与底架结构间的关系。分析在90°工作位置,擦窗机在3种工况下的抗倾翻性,分析结果见表2,为下文合力矩的计算和抗倾翻系数与应力变形的对比分析提供必要的数据支撑。
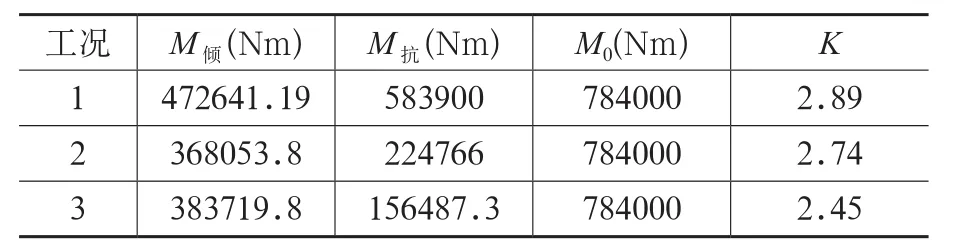
表2 90°位置三种工况下擦窗机抗倾翻性
3 90°工作位置底架梁结构力学分析
伸缩臂式擦窗机的伸缩臂、立柱和底架均为箱型结构,利用结构力学的方法对擦窗机进行理论分析,建立擦窗机整机的力学模型如图3所示,图中A、B、C三点为上部结构和底架结构的相接点。

图3 整机结构示意图
3.1 上部结构力学模型的简化
以工作状态为例,简化后上部结构力学模型如图4所示。对B、C点施加固定铰支座,A点施加滑动铰支座;将上部结构受力简化处理,其中F1包含平台、平台钢丝绳、臂头及载荷所产生的作用力,F2为配重的作用力;F3为风载荷;F4为平台左侧除F1以外的作用力,F5为平台右侧除F2以外的作用力。
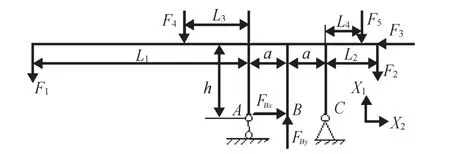
图4 简化结构力学模型
3.2 分析与求解
3.2.1 上部结构支反力计算
计算上部结构X1方向和X2方向产生的位移量,计算结果见表3。

表3 上部结构X1方向和X2方向产生的位移量
根据变形协调条件和叠加原理可以得到

其中:Δ1P和Δ2P分别包括所有外力在X1方向和X2方向上产生的位移之和,δ11和δ12指FBy和FBx的力在X1方向上产生的单位位移,δ21和δ22指FBy和FBx的力在X2方向上产生的单位位移。求解上述方程组可以得到3个铰接点处的支反力,同理可以分析出另外两个工况下擦窗机底架结构的受力情况,计算结果见表4。
3.2.2 底架结构应力分析
底架结构简化为简支梁结构进行分析计算,其中梁为等截面箱型梁,截面尺寸如图5a所示,梁长度为2 000mm,梁上A、B、C3个截面分别与上部结构对应,以B点为原点、BC方向为x轴正方向建立坐标系如图5b所示。

表4 底架受力参数表
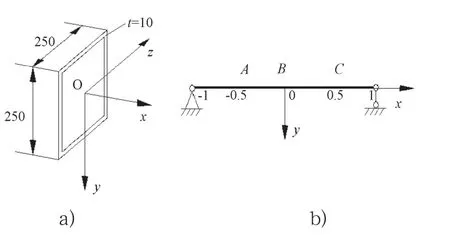
图5 底架简化结构图
根据底架梁上所受到的载荷情况,可以分别得到3种工况下,A、B、C截面底架的应力,计算结果见表4,绘制三种工况下的底架应力分布图如图6所示。图6可以看出,工况2、3的应力分布曲线相似,且与工况1的应力分布曲线有较大不同,各工况下应力分布曲线相对于y轴呈非对称。各工况下最大应力值及最大应力点位置见表5。对比各工况下最大应力点x坐标与合力矩的正负关系可以看出,各工况下最大应力点x坐标与合力矩的正负关系相反。
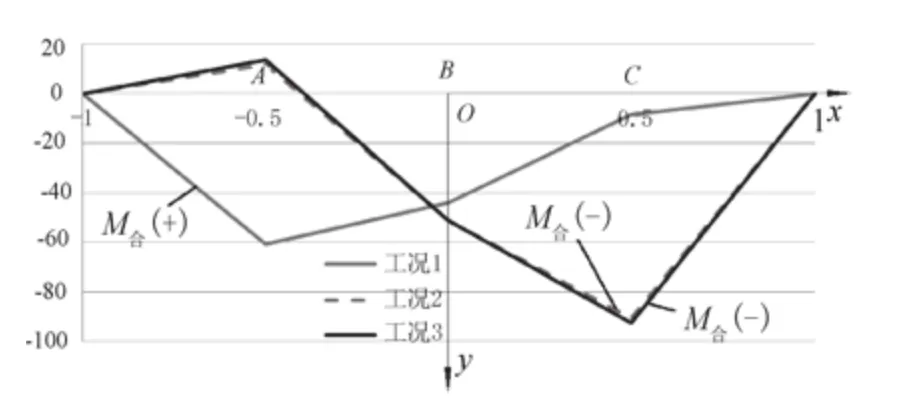
图6 三种工况下底架应力分布图
3.2.3 底架结构挠度分析
根据受力情况,将底架梁分成4段,由挠曲线微分方程可以分段得到挠曲线微分方程

根据挠曲线方程可以绘制出三种工况下,底架梁的挠度变化曲线(图7);以图7可以看出,工况2、3的挠度变化曲线相似,且与工况1的挠度变化曲线有较大不同,工况1的最大挠度点出现在D点,工况2、3的最大挠度点分别出现在E点、F点,各工况下应力分布曲线相对于y轴呈非对称。

图7 三种工况下底架挠度曲线

表5 底架最大应力/挠度分布表
各工况下最大挠度值及最大变形点位置见表5,对比各工况下最大挠度点x坐标与合力矩的正负关系可以发现,各工况下最大应力点x坐标与合力矩的正负关系相反。
4 90°工作位置底架梁有限元分析
由结构力学计算可知,底架结构的应力分布各形变量与合力矩方向有关,并且底架的应力分布情况与抗倾翻系数存在关联,但理论计算无法表征底架结构的实际应力分布和形变情况,所以有必要利用有限元法结合理论计算结论加以分析。
4.1 有限元模型的建立
利用ANSYS对擦窗机底架进行有限元分析,选用shell63单元作为有限元分析单元,得到有限元模型如图8所示。其中AB侧为前轨,CD边为后轨,E为加强板。
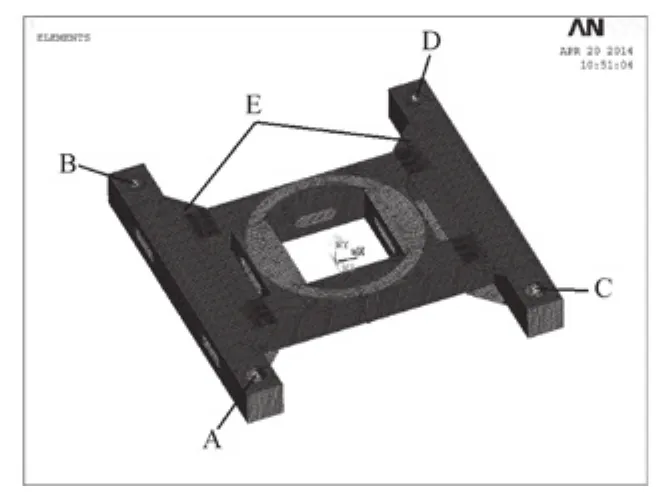
图8 底架结构有限元模型
根据各工况下擦窗机受力情况,对擦窗机底架模型施加边界条件,边界条件参数见表6所示;在4个销轴孔周围的下表面施加约束。

表6 加载参数表
4.2 分析结果
分析90°工作位置擦窗机3种工况下的应力分布和节点位移分布可以看出,最大节点位移,与理论计算中最大挠度点出现的位置相近;提取各工况下最大节点位移值和最大位移点x坐标符号汇总于表7,可以看到抗倾翻系数随最大节点位移值的增大而减小;最大位移点x坐标符号与合力矩符号均相反,说明最大位移均出现在受压的一侧。

表7 分析结果汇总表
5 结 论
结合理论计算与有限元分析,可以得到以下结论。
1)底座受到的最大应力分别为68.862 MPa、96.242MPa、108.668MPa,3种状态下的最大应力值依次递增;各工况下最大应力值均满足材料强度要求,底架设计结构合理;应力分布相对于底架中心线的偏移方向与合力矩方向存在明显的相关性,最大应力点,均出现在中心线偏向受压的一侧。
2)底座的最大形变量分别为1.08mm、1.22mm和1.28mm,3个工况下的最大变形量依次递增;节点最大位移量,均出现在中心线偏向受压的一侧;节点位移分布情况与合力矩方向存在明显相关性,表现为受压的一侧节点位移增大;
3)计算得到抗倾翻系数分别为2.89、2.74和2.45,3个工况下的抗倾翻系数依次递增;底架的应力分布和变形越不均衡,擦窗机整机的抗倾翻系数越小;抗倾翻系数随底架所受最大应力和最大形变量的增大而减小,表明底架结构的应力分布和变形越均匀,结构的整体稳定性越强,同时受到的最大应力和最大形变量越小。
[1] GB 19154-2003,擦窗机[S].
[2] 陶 义.折臂式擦窗机整机的动态分析[D].西安:长安大学,2011.
[3] 侯峰涛.CD250型复合折臂式擦窗机运动及整机结构有限元分析[D].西安:长安大学,2009.
[4] 张军红,杨 欣,崔 瑾,等.擦窗机悬挂轨道三维结构有限元分析[J].计算机辅助工程,2013,(2):41-54.
[5] 夏德茂,王 进,马军星,等.CD250型擦窗机折臂静动态有限元分析[J].工程机械,2010,(12):16-21.
[6] 马旭东、于 玲、左 丹.箱型截面梁桥的结构力学分析[J].工业技术经济,2002,(1):79-80.
[7] 黄长征、谭建平.大型钢结构件有限元力学分析方法研究[J].机械设计与制造,2005,(6):69-71.
