作战空间协同感知及资源冲突消解研究❋
2014-12-02
(海军工程大学电子工程学院 武汉 430033)
1 引言
在对敌方目标进行探测的过程中,考虑到在复杂实时动态环境下,由于存在时间约束和资源约束,需要对传感器及传感器所在平台等资源进行有效地协同和管理,以充分发挥探测设备的性能,改善数据的收集过程,以期达到及早发现目标、改善航迹质量、提高目标跟踪及识别可靠性的目的,该过程被称为作战空间的协同感知。在协同感知的过程中,每个感知资源都是自治的,有着自己独立的结构、知识库和问题求解策略,与此同时,每个探测设备的资源、能力、信息是有限的,从而产生冲突。在就冲突进行协商的过程中,如果不能就调度任务的时间、顺序和资源分配达成一致,则需要采取部分-全局规划进行冲突消解。
2 协同感知任务的描述
通常,一个任务可以由如下多元组描述:
Task=〈ID,智能体,subtasks,supertasks,arrival_time,earliest_start time,deadline,quality,duration,cost,utility,condition〉
其中,ID 是任务的序号,它是唯一的编码;智能体是任务涉及到的智能体;subtasks是子结点任务;supertasks是父结点任务;arrival_time是任务到达的时间;earliest_start time是任务的最早开始时间;deadline是任务的最迟完成时间;quality任务涉及的数量;duration是任务涉及的周期;cost是任务涉及的成本;utility是任务涉及的效用;condition是任务完成的约束条件。
任务分解智能体在接受感知任务后,知识库查找资源智能体所代表的感知设备的探测能力,将任务涉及到的能力需求与感知设备具有的探测能力进行匹配,从而完成任务的分解。
我们以定义的形式,描述智能体集合和具有的领域知识如下:
假定虚拟多智能体系统指控系统中有资源智能体集合A={a1,a2,…,an},ai表示第i个资源智能体。
定义1Ki={Ki1,Ki2,…,Kim}表示第i个资源智能体在某一领域中所具有的知识(即能力);KA=∪i=1…nKi表示所有资源智能体具有的知识。
定义2 当有任务T需要完成时,解决它需要用到的知识为KT={KT1,KT2,…,KTs}时,有分解过程:
1)当KT∈Ki且ai∈A时,任务T能被单一的资源智能体解决,而不需要分解。
2)当KT∈KA但对于所有的ai∈A,不能得到KT∈Ki,则任务T必须分解,需要被多个智能体来共同解决。T={ST1,ST2,…,STp},且对于所有的STj∈T,j=[1,p],有KSTj⊆Ki,否则任务T中的子任务需要继续分解,一直到所有的子任务都可以由相应的智能体集合SASTj⊆A(∪j=1…pSASTj=A)来完成为止。
3)如果KT⊆KA恒不成立,则任务T不能被资源智能体集合A完成。需要人来干预决策。
任务分解完成后,明确任务之间的约束关系,以表的方式存储在系统数据库中,等待任务智能体进行任务分配。
3 构建协同感知环境
建立协同感知环境的过程分为以下四步:
1)如果某资源智能体接到一个自己不能够独立解决的任务,则要重新对任务进行规划或与任务的发起者就任务重新进行协商,这时,就需要发送协同请求给任务智能体以建立协同群组。
2)任务智能体接收到资源智能体的协同请求后,根据协同请求信息内容和各用户的功能服务信息库来选择需要协同完成该任务的资源智能体,并将协同请求信息转发给选择的资源智能体,获得了该资源智能体的响应后,注册该资源智能体到组员列表,重复此过程一直到形成一个能够完成任务的协同群组。
3)各资源智能体和任务智能体维持群组关系直到任务的完成。群组内的各资源智能体之间可以通过任务智能体互相通信。资源智能体可以根据自己的情况请求退出群组,但必须得到任务智能体的确认。若因某个资源智能体的退出而导致完成任务的协同用户不够,则由任务智能体再发送协同请求给新的资源智能体请求加入到协同群组。
4)任务智能体撤销群组关系。任务智能体在任务全部解决完毕后撤销群组关系,撤销时由任务智能体发送完成任务并请求撤销群组的消息给各资源智能体,得到回复后即撤销群组。
一个群组智能体必须共享所需达到的协同任务和成员列表。当一个资源智能体加入或离开所在的群组时,任务智能体必须确认并更新共享信息。
4 形成共享态势视图[1~3]
共享态势视图的形成包括以下两个步骤:
1)合成全局共享态势图,包含了地理环境信息、气候环境信息、地域信息、态势信息、情报特征信息等信念集及其属性集。属性集包括多个特征属性和相关变元,如情报特征信息的属性集包含信源可靠度、可信度、时间等属性和变元。可信度变元可预设为多级信度指标集,信念模型的实值空间即构成全局态势知识库。
态势图是一个正在不断发展的概念,最早源于美军通用作战态势图(Common Operational Picture,COP)。美国国防部的网络中心战报告把通用作战态势图提到了非常重要的地位,将其作为战斗空间感知的基础。COP 为部队提供作战空间的状态、行动和环境信息。通过COP,指挥官可以实时、准实地了解作战态势的发展,快速、准确、自信地交流作战意图,作出正确的军队行动计划,准确、及时、高效地实施指挥、控制。态势图是一个分布式的数据处理和交换环境,通过开发一个一致的联合通用数据库,使用通用的数据框架和设施,跨组织地共享数据,使得每一个参与者能够通过各自领域的传感器、专门技术等,贡献、纠正、增加该数据库的价值;不是电子传送的快照或静态图像,而是公共信息的动态显示;不是由于对所有用户提供同样的视图而称之为“通用”,而是由于所有用户都使用同样的数据;让所有系统都提供信息并不足以产生态势图。
战态势图服务体系可以分层部署,逐级上报,态势图的生成可以经过通用战术数据集(Common Tactical Dataset)、通用战术态势图(Common Tactical Picture,CTP)、COP 三个阶段。由态势图服务体系的参与者实时主动提供数据,在分布式数据管理技术支持下,经过去伪存真、归一化处理,并保持数据的一致性,建立通用战术数据集;对各个通用战术数据集进行关联/融合处理后,成为在一定领域的通用战术态势图,并主动实时提供给高级指挥部门;高级指挥部门对各战术态势图进行实时统一管理,形成COP,经过权限控制,为每一用户主动提供实时态势图服务。
2)进行信息校验,包含信息不一致、信息缺失、信息错误三个子类型。以信息缺失目标过程为例,定义有属性信息缺乏、证据缺乏、特征信息缺乏等。属性信息缺乏指当前目标数据的重要属性信息不完整,比如速度、位置等。证据缺乏指当前目标信息无法得到其它信息来源的证实。特征信息缺乏指根据当前信息不足以进行目标识别,无法归入信念集。
5 协同感知任务分配
感知任务的分配过程可以描述为:任务智能体首先将包括截止时间的子任务发送到有能力完成任务的资源智能体,资源智能体针对多个招标的子任务,参考各自的资源条件来进行选择优化,并提出自己的建议开始时间和截止时间、空闲的其他时间段以及其它任务特性参数。任务智能体接收到多个资源智能体的投标信息后,进行投标的多属性决策。一旦资源智能体对投标进行了确认,它将锁定投标任务的时间段,将其保留下来完成该任务,使得别的投标任务不能占用该时段。投标确认后,其它的资源智能体不参与任务的完成,但是如果出现意外情况时,如传感器故障等,任务智能体与这些替代资源智能体协商来完成任务,这将大大减少调度时间。
6 协同感知冲突消解
资源智能体交互协商目的是进行冲突消解。冲突问题的解决受到冲突资源的性质、资源智能体的主体结构模型、资源智能体的角色、资源智能体的模型种类和资源智能体的行为约束以及推理方法的综合影响[4]。
冲突消解[5~7]一般包括以下两种方法:
1)交互协商
协商操作发生在两个或多个具有相同等级的资源智能体之间[8~9],由某一资源智能体向其它资源智能体发出协商请求,若得到对方允许,则接着发出协商意见,若得到其它资源智能体的认可,则这些资源智能体达成共识,消除了局部决策方案之间存在的矛盾。
资源智能体之间交互协商的抽象算法框架如图1所示。
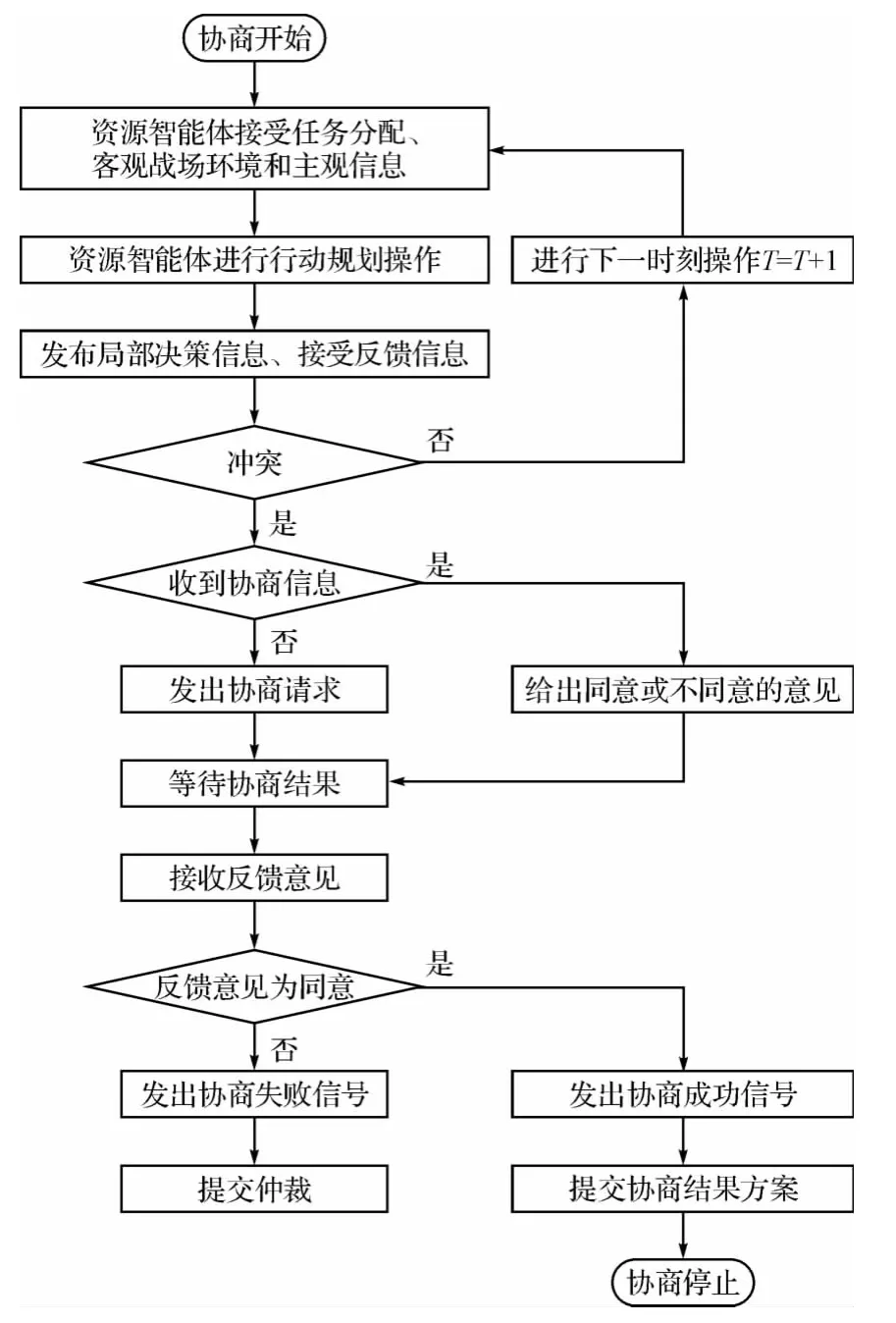
图1 资源智能体之间交互协商的抽象算法
2)仲裁
若资源智能体无法达成共识,或在所要求的时间范围内没有能够产生一致的局部方案,则通过任务智能体的仲裁功能进行仲裁[10],进而给出一个不矛盾的局部方案。任务智能体提供有规则依据的中心协调强制决策执行的功能。
资源智能体之间提交仲裁的抽象算法如图2所示。

图2 资源智能体之间提交仲裁的抽象算法
7 结语
本文细化了对探测设备进行任务管理的内涵,使之涵盖到协同感知环境的构建、协同感知任务的分配以及感知任务的冲突消解等方面,以解决有限时间、有限资源情况下的资源分配、系统组织、行为协调等问题。
[1]赵宗贵,李君灵.共用作战图现状与发展趋势[J].中国电子科学研究院学报,2008(4):385-392.
[2]王泽根.COP及其GIS应用需求[J].测绘科学,2009(5):151-152.
[3]罗佳,黄玺瑛.基于多重信息单元的战场态势要素构建研究[J].国防科技,2012(3):66-70.
[4]徐润萍,王树宗,顾健.兵力协同计划资源冲突协商方法研究[J].系统仿真学报,2005(5):1216-1220.
[5]徐选华,周声海.非常规突发事件应急决策冲突消解协调方法[J].控制与决策,2013(8):1138-1144.
[6]屈正庚.协同工作中冲突消解机制的研究[J].计算技术与自动化,2012(3):104-108.
[7]王进,徐洸.计算机支持的协同计划冲突消解问题研究[J].空军雷达学院学报,2003(3):5-8.
[8]孟秀丽,易红.基于多目标决策的协同设计冲突消解方法研究[J].计算机集成制造系统,2005(5):625-629.
[9]孙林夫.面向网络化制造的协同设计技术[J].计算机集成制造系统,2005(1):1-6.
[10]李涛,熊光楞.基于优化算法的冲突仲裁策略[J].计算机学报,2002(1):57-62.
