基于小波变换和聚类的BLDCM故障检测与识别
2014-12-02周元钧马齐爽
王 欣 杜 阳 周元钧 马齐爽
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
随着飞机在民用和军用领域中需求的日益增加,全电飞机(AEA,All Electric Aircraft)被广泛认为是下一代飞机的目标[1-3].本文论及的双通道无刷直流电动机(BLDCM,Brushless DC Motor)系统正是此类飞机上实现舵面控制、刹车控制等重要功能的机电作动器(EMA,Electro-Mechanical Actuator)[4-5].电机特殊的双通道结构可以保证作动系统的高可靠性要求[6],从而使系统在任一通道故障时仍可带故障运行,即具有容错能力.但如果不及时隔离或调整故障通道,不仅会降低系统性能,还会引起系统部件的损伤,甚至危及飞行安全.因此实时准确的故障检测与识别过程在实践中具有重要意义.
针对BLDCM系统,文献[7]给出了一种采用归一化快速傅里叶变换方法提取频率特征,再结合专家系统进行故障检测与识别的方法.但为了抑制能量泄漏问题,每次判断需要截取4个电周期的信号长度,在低速运行状态下这将影响故障实时检测的快速性.文献[8]提出了一种基于参数估计的故障检测方法,但这种方法受到电机转速必须在工作点附近小幅波动的限制,不适用于转速大范围调节的工作环境.文献[9]提出了一种改变BLDCM系统逆变器拓扑结构的容错控制方法,这种方法简单可行但在容错运行时仅能产生正常工作时一半的额定功率.
鉴于航空用BLDCM作动系统特殊的双通道电机结构及其换相特点,本文提出了一种连续小波变换(CWT,Continuous Wavelet Transform)与层次聚类算法(HCA,Hierarchical Clustering Algorithm)相结合的故障检测与诊断方法.
1 系统结构与故障类型
1.1 系统结构
系统主要由BLDCM构成,它的定子槽中嵌有两套相位相差30°电角度的三相集中绕组.每套绕组各由一套功率电路独立控制,构成容错的双通道结构,如图1所示.电机采用120°导通的二相导通方式,即每套绕组每60°电角度换相一次,换相信号由旋转变压器测量提供.每套功率电路由双向斩波器和三相桥式逆变器组成.斩波器输出电流Id1和Id2为直流母线电流,亦是本方法中采集的电流信号.系统输出与减速器和滚珠丝杠相连接以实现位置伺服.为使两个通道均衡、快速地运行,整个系统采用通道电流反馈、电动机转速反馈和飞机舵面位置反馈的三闭环控制方案.

图1 双通道BLDCM系统功率电路结构图[7]Fig.1 Diagram of dual-redundant BLDCM system[7]
1.2 故障类型
根据本系统各部分可靠性分析结果[6]可知,以下故障发生几率相对较高,见表1.其中系统无法依靠现有功能检测的故障包括:逆变器断路故障、旋转变压器位置故障、电机相绕组断路故障和电机匝间短路故障.这些故障都会使直流母线电流波形发生畸变,且电流值不恒为零.如采用CWT对故障的突变特性进行提取,会呈现不同特征的时间-尺度图.由于电机匝间短路故障很难在实际系统中模拟,本文将仅针对前3类故障进行试验与分析,并提出一种故障检测与识别的方法.

表1 双通道BLDCM系统主要故障类型[7]Table 1 Principal fault types in BLDCM system[7]
2 故障检测与识别方法
2.1 CWT方法
近年来小波变换(WT,Wavelet Transform)已成为一种重要的时频变换方法.它将信号在多尺度下分解为同时包含时域和频域信息的小波变换系数 (WTC,Wavelet Transform Coefficient)[10].CWT是将WT运用于连续时间函数的方法.
假设ψ(t)在时域和频域都是连续的函数,如果满足:

信号f(t)∈L2的CWT在尺度a>0,b∈R下定义为

信号特征的提取是正确识别故障的前提和关键,其目的是对各种故障的差异性进行定量的描述,增加不同状态下信号间的区别,使故障便于识别.总结故障诊断领域中基于WT的特征提取方法主要有以下几类:小波系数模极大值[11]、频带特征频点、小波脊线[12]、小波系数灰度矩[13]以及包络提取[14].
2.2 基于CWT和HCA的故障检测与识别方法
CWT对信号具有良好的带通滤波效果.当选择适当的母小波时,对于信号的突变特征尤为敏感.不但能反映出突变的个数与时间位置,其WTC的模极大值还可对信号的突变特性进行量化.尤其在高频部分,相对S变换具有更高的频域分辨能力和收敛性[15].若以信号换相时突变的位置和采样数据中突变的个数为特征,则CWT很容易对双通道BLDCM系统的运行状态进行判断.
校企共同成立教学质量监控管理机构,负责教学质量保障体系的组织运行与实施、信息整理与反馈。依托网络教学综合服务平台,建立持续改进的质量保障体系,深入推进教学模式、教学考核评价和资源体系改革,全面落实以学生为中心的个性化培养体系,真正实现“以学为主”的教学模式转变。建立学业动态预警机制,让学生能够及时正视自身问题,分析并进行改正。通过毕业生就业发展跟踪、用人单位反馈和第三方教育评估机构的人才培养质量年度报告,评估学生的职业能力与素质并及时反馈,确保人才培养质量的全面提高。
由式(1)和式(2)可看出每一个采样信号经CWT后都对应着一个小波系数模值,以下简称为模值.时间-尺度图就是用来反映模值随时间和尺度变化的三维效果图,每个点的模值由该点的颜色表示.当选定一个尺度参数就可得到一个二维的时间-模值图,以下简称为模值图,此时采样点随时间与其模值一一对应.
由于信号一次突变在模值图中对应一组连续的模值变化,因此需要对所有模值进行聚类才可以确定突变位置.人工神经网络(ANN)和支持向量机(SVM)一般是基于监督学习的分类算法,事先需要通过样本集进行训练,而且一般需要事先知道分类的类别数;HCA则是基于无监督学习的分类算法,而且无需预先估计聚类的类别个数,其目的是把相似性高的数据聚在一起,更适用于上述问题的求解[16].通过HCA可以将临近模值相似的采样点按时间位置划分到同一类(区间).如果选择适当的聚类阈值,可以避免数据被划分得过于琐碎或过于笼统,使采样信号的特征得以充分表达.进而计算每一类中所有位置的取整平均值,得到实际信号的突变位置和突变次数信息.
如1.1节所述,通道中任一相绕组每60°电角度换相一次.而两个通道中的两套绕组之间相差30°电角度.这样由另一套绕组换相产生的互感影响(突变)正好在相邻两次换相的中点位置.由于连续小波变换只对信号中的突变敏感,正常工作条件下两个通道的聚类位置结果应相同.
采用上述方法,每个通道的采样信号对应一组数列P,数列的元素为通道中发生突变的中心位置(位置取整平均值).将两个通道的数列P1和P2及两个通道突变的个数N1和N2进行比较,便可对系统的运行状态进行判断,判断依据为:①两组数列中元素的个数差|N1-N2|,反映两个通道相同周期内信号突变次数的差异;②数列元素的标准差,反映每个通道中突变位置的波动性.突变特征提取算法的具体过程如图2所示.
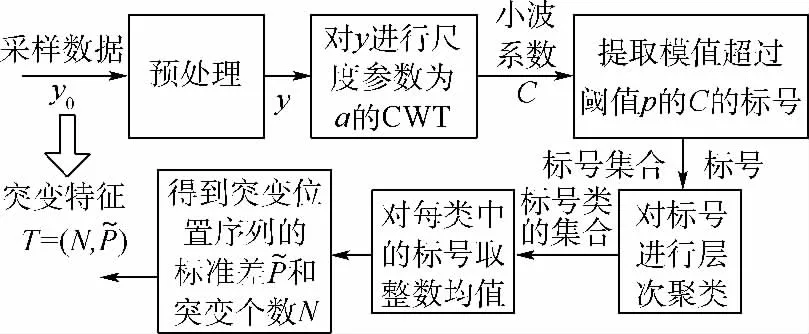
图2 信号突变特征提取过程示意图Fig.2 Diagram of process for fault-feature extraction
3 试验数据及分析
试验采用TI公司生产的TMS320F2812控制芯片,实际试验系统如图3所示.试验转速为2000 r/min,承受轻载2 N·m.根据信号特点,母小波选用“db2”小波.截取的试验数据包含2个电周期,采样点数为2000点.由于逆变器功率管断路故障与一相绕组断路故障同为缺相运行,它们在时域中的表现形式相似,因此在实际BLDCM系统上只需进行正常运行、一相绕组断路故障和旋转变压器位置信号故障的试验.

图3 实际试验系统与设备Fig.3 Experimental circuits and devices
永磁体产生的磁场分布不均,产生的转矩会出现脉动现象.电动机在高速加载运行时,由于转动惯性和负载影响脉动的现象并不明显;但当电动机运行在低速轻载状态时,脉动现象会非常严重.在采集到的直流母线电流信号上表现为基波分量较大,增加了故障检测与诊断的难度.
1)正常工作情况.图4a、图4b是两套绕组直流母线电流的时域波形图.如2.2节所述,在电机换相时,电流波形表现为向下的尖峰(B处);由于互感作用,另一相换相时会对此相波形产生向上的尖峰(A处).因此在1个电周期内Is1和Is2会产生12次突变,且位置相同.图4c、图4d是相应的WT时间-尺度图,由图可见,2个通道均有24条较亮线.

图4 正常工作情况下两套绕组电流波形与相应的时间-尺度图Fig.4 Bus currents and their time-scale charts under normal condition
2)断一相故障情况.图5a、图5b中 Is1为故障通道,在每个电周期内缺少了4次换相,因此突变次数减少了6次(4个本应由Is2互感引起的向上的尖峰和2个原本由Is1换相产生的向下的尖峰).相应的Is2在每个电周期内缺少2个向上的尖峰.因此每个电周期内Is1的突变次数减少了6次,Is2的突变次数减少了2次.图5c、图5d是相应的WT时间-尺度图,由图可见,Is1有12条较亮的线,Is2有20 条.

图5 断一相故障情况下两套绕组电流波形与相应的时间-尺度图Fig.5 Bus currents and their time-scale charts under one-phase open-circuit fault condition
3)旋变位置故障情况.图6a、图6b是两套绕组直流母线电流的时域波形图,位置偏差角度为5°电角度.图6c、图6d是相应的WT时间-尺度图.
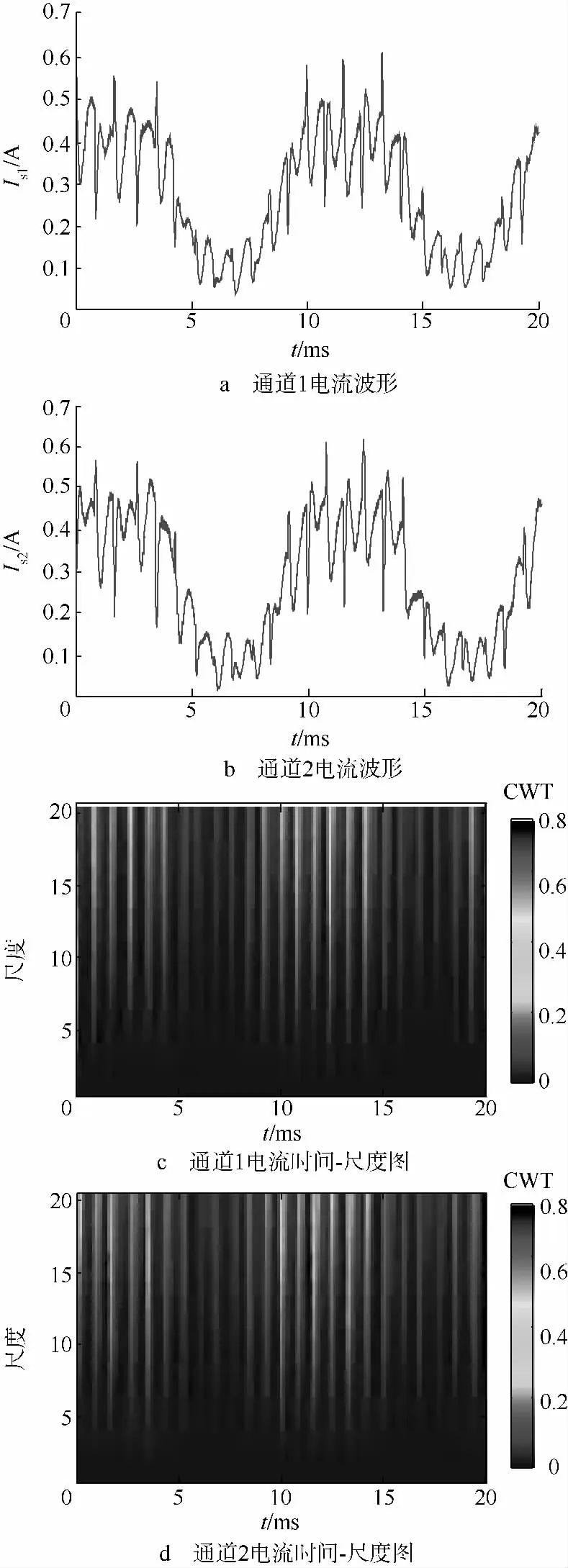
图6 旋变位置故障情况下两套绕组电流波形与相应的时间-尺度图Fig.6 Bus currents and their time-scale charts under resolver position fault condition
为减少干扰,选取尺度参数为10的采样点模值图,以断一相绕组的故障通道为例如图7所示.同时为避免边界效应,变换后的模值只取第50~1950点.图中横坐标是采样点随时间顺序的标号,纵坐标是模值.从图7中可以看出,如2.2节所述信号一次突变在模值图中对应一组模值变化,为了确定每一类的中心位置,采用HCA对所有的点进行处理.模值阈值p选为小波系数模值最大值的8%.层次聚类过程中采用欧式距离和平均值连接方法.图8是层次聚类结果的一部分,横轴为采样点随时间顺序的标号,纵轴代表不同采样点标号之间的距离,即标号之差.

图7 断一相故障下Is1通道母线电流小波系数模值曲线(a=10)Fig.7 Index-modulus curve of current of winding1 at scale 10 under one-phase open-circuit fault condition
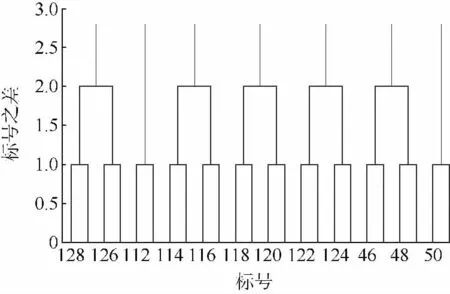
图8 部分节点标号的聚类结果图Fig.8 Tree-shape graph of partial results of HCA
选聚类阈值为50,同样以断一相绕组的故障通道为例,此通道中序列P1的元素(经HCA后计算出的突变位置)以竖线形式在原图中标出,如图9所示.可见信号突变位置均被准确提取.

图9 断一相故障下Is1通道母线电流经突变特征提取后与原信号对比图Fig.9 Comparison between sudden-change points with original current of winding1 under one-phase open-circuit fault condition
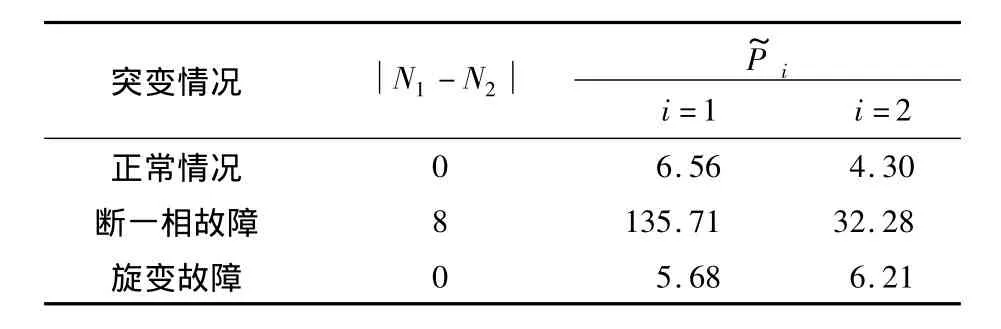
表2 突变特征比较结果Table 2 Comparison of sudden-change features
4 结论
仿真及试验研究表明:当具有双通道结构的BLDCM系统中一个通道发生故障并继续运行时,选用对突变过程较为敏感的CWT时频分析方法与HCA相结合的故障检测与识别方法可以对电机断相故障、逆变器功率管断路故障进行有效的检测与识别.这种方法充分利用了系统特殊的结构和换相特点,信号特征提取算法简单,对突变故障具有很明显的区分效果,可靠性高.不受电机不同转速、不同负载的影响,不增加系统复杂度.并且这种方法可以应用于运行状况相对不利的低速轻载条件.
References)
[1] Cochoy O,Hanke S,Carl U B.Concepts for position and load control for hybrid actuation in primary flight controls[J].Aerospace Science and Technology,2007,11(2/3):194-201
[2] Cao W,Mecrow B C,Atkinson G J,et al.Overview of electric motor technologies used for more electric aircraft(MEA)[J].IEEE Trans Ind Electron,2012,59(9):3523-3531
[3] Hoffman A C,Hansen I G,Beach R F,et al.Advanced secondary power system for transport aircraft[J].NASA Technical Paper,1985
[4] Romeral L,Rosero J A,Espinosa A G,et al.Elecrical monitoring for fault detection in an EMA[J].IEEE Aerospace and Electronic Systems Magazine,2010,25(3):4-9
[5] Garcia A,Cusido J,Rosero J A,et al.Reliable electro-mechanical actuators in aircraft[J].IEEE Aerospace and Electronic Systems Magazine,2008,23(8):19-25
[6]董慧芬.复合式余度机电作动系统控制策略的研究[D].北京:北京航空航天大学,2006 Dong Huifen.Research on the control strategy of the hybrid redundant electro-mechanical actuator system[D].Beijing:Beijing University of Aeronautics and Astronautics,2006(in Chinese)
[7]王欣,周元钧,马齐爽.基于FFT和专家系统的BLDCM系统故障检测与识别[J].北京航空航天大学学报,2013,39(4):564-568 Wang Xin,Zhou Yuanjun,Ma Qishuang.Fault detection and identification for dual-redundant BLDCM system using FFT algorithm and expert system approach[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(4):564-568(in Chinese)
[8]李宏,王崇武,贺昱曜.基于参数估计模型的对转永磁无刷直流电机实时故障诊断方法[J].西北工业大学学报,2011,29(5):732-737 Li Hong,Wang Chongwu,He Yuyao.Real-time fault detection of anti-directional-twin-rotary brushless DC motor(BLDCM)using least squares parameter estimation[J].Journal of Northwestern Polytechnical University,2011,29(5):732-737(in Chinese)
[9]林海,严卫生,李宏.无刷直流电机驱动控制容错方案研究[J].西安交通大学学报,2009,43(2):53-57 Lin Hai,Yan Weisheng,Li Hong.Inverter fault-tolerant operation of brushless DC motor drives[J].Journal of Xi'an Jiaotong University,2009,43(2):53-57(in Chinese)
[10] Daubechies I.Ten lectures on wavelets[M].Pennsylvania:SIAM,1992
[11] Mallat S,Hwang W L.Singularity detection and processing with wavelets[J].IEEE Trans on Information Theory,2002,38(2):617-643
[12] Carmona R A,Hwang W L,Torresani B.Characterization of signals by the ridges of their wavelet transforms[J].IEEE Trans on Signal Process,1997,45(10):2586-2590
[13] Zhang Y P,Huang S H,Hou J H,et al.Continuous wavelet grey moment approach for vibration analysis of rotating machinery[J].Mechanical Systems and Signal Processing,2006,20(5):1202-1220
[14] Zhou X,Yan P.New method of diagnosis of railway roller bearing based on the wavelet analysis[J].Journal of Tsinghua University:Sci& Tech,1996,36(8):29-33
[15]武国宁,曹思远,马宁,等.S变换的时频分析特性及其改进[J].地球物理学进展,2011,26(5):1661-1667 Wu Guoning,Cao Siyuan,Ma Ning,et al.The time frequency property of S transform and its generalization[J].Progress in Geophysics,2011,26(5):1661-1667(in Chinese)
[16] Maqbool O,Babri H A.Hierarchical clustering for software architecture recovery[J].IEEE Trans on Software Engineering,2007,33(11):759-780
