具有实时语音播报的超声波测距测速仪设计
2014-11-29曹永红CAOYonghong刘小亮LIUXiaoliang
曹永红CAO Yong-hong;刘小亮LIU Xiao-liang
(石家庄铁道大学四方学院,石家庄 051132)
(Shijiazhuang Tiedao University Sifang College,Shijiazhuang 051132,China)
0 引言
对于蝙蝠等一些无目视能力的生物来说,借助超声波定位技术进行防御、捕捉猎物等维持自身的生存,也就是生物体发射超声波(超过20kHz 的机械波),一般不能被人们所听到,这种超声波是借助空气等媒质进行传播,借助被捕捉的猎物或障碍物反射回来的回波的强弱和时间间隔的长短判断猎物或障碍物位置的方法,根据这一原理,人们提出了超声波测距。
近年来,为了满足导航系统、工业机器人自动测距等方面的需要,自动测距的重要性逐渐显示。超声波技术已成为一门以物理、电子、机械及材料科学为基础的、各行各业都要使用的通用技术之一。
1 超声波测距测速的原理
超声波测距的方法有多种,主要包括:相位检测法、声波幅值检测法等。其中,相位检测法的检测精度比较高,但是检测范围有限;声波幅值检测法在检测过程中容易受到反射波的影响和制约,检测精度不高。
本设计硬件设计采用超声波往返时间检测法。工作时,单片机驱动超声波发射探头发出一连串的超声波脉冲,超声波发射探头发出最后一个脉冲后,给单片机提供一个短脉冲,单片机开启计数器开始计时,超声波接收探头则在接收到被测物体反射回来的反射波后,也向单片机提供一个短脉冲,单片机关闭计数器。计数器所计时间即超声波往返于探头与被测物体所用的时间。这个时间间隔乘以超声波在此环境温度下的声速,即为超声波在这个时间段内的行程。当超声波发射探头和接收探头之间的距离相对于两探头到被测物体之间的距离很小时,可以认为行程的一半即为所要测的距离值;当超声波发射探头和接收探头之间的距离相对于两探头到被测物体之间的距离不可忽略时,前面的假设则不能成立,所以超声波检测有一个允许的最小测量范围。其次,由于超声波发射探头发出的超声波并不是理想的绝对沿直线传播,其中,一部分超声波没有经过被测物体反射就直接绕射到接收探头上,这部分信号是无用的,进而在一定程度上产生系统误差。在设计过程中,采用延时技术解决这一问题。发射探头发射超声波后,通过增加延时,借助软件关闭所有中断,对此期间接收到的任何信号接收电路不予理睬,之后再等待反射信号的到来。所以,这又使得系统不可避免地产生了测量盲区。经过检验,本系统的盲区为2cm,即被测物体在2cm以内时,系统不能检测。所以本次测量的最小距离为2cm。
由于相邻的两次发射超声波脉冲的时间间隔为一定值,即发射超声波的频率一定。连续发射两次超声波脉冲测得的两个距离值求差除以这个时间间隔即得物体的平均速度。而超声波的发射频率很高,故可认为此平均速度为物体的瞬时速度,实现实时测速的功能。
2 系统硬件、软件设计
单片机是本系统的控制核心部分,采用宏晶科技推出的STC89C52RC 芯片。发射电路采用74LS04 六反向器,通过它对单片机产生的方波信号进行放大。接收处理电路采用的是CX20106A 电路、LM358 电路和LM567 锁相电路,通过接收电路对接收到的信号进行增益放大和锁相整形,最终再输出稳定准确的脉冲给单片机。显示部分采用了型号为FG12864E 的单色128×64 点阵液晶显示模块,利用了该模块灵活的接口方式和简单、方便的操作指令;采用动态扫描的方式,通过单片机译码,实时显示测量的距离或速度值。语音播报部分采用美国ISD 公司推出的ISD4004 语音芯片,与液晶显示配合实时的对测量的距离或速度值进行语音播报。
超声波测距测速仪原理框图如图1 所示。
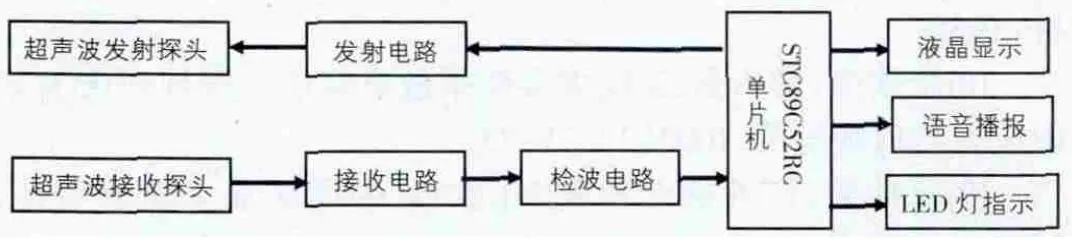
图1 系统原理框图
完成了系统的硬件设计之后,接下来就是系统软件的设计,它所需要完成的主要是针对系统功能的实现及数据的处理和应用。由于C 语言通用性强,其程序本身不依赖于机器硬件系统,故本软件采用C 语言编写。驱动超声波传感器的40kHz 方波信号的产生、时间差的读取、距离速度值的计算以及显示输出的译码和语音播报的实现都由单片机编程完成。其中,对LCD 进行编程,必须先了解LCD 的接口协议。液晶显示子程序设计的关键之处在于软件中时序的安排要与液晶显示模块内部的时序一致,否则将不会显示成功。语音播报模块是结合液晶显示模块一起使用的,要注意的是该模块中的软件时序的安排要与液晶显示模块内部的时序一致,否则将出现声音提示和液晶显示不一致的现象。
3 误差分析
超声波测距在实际应用也有很多局限性,这都影响了超声波测距的精度。一是超声波在空气中衰减极大,由于测量距离的不同,造成回波信号的起伏,使回波到达时产生较大的误差;二是超声波脉冲回波在接收过程中被极大地展宽,影响了测距的分辨率,尤其是对近距离的测量造成较大的影响。其他还有一些因素,诸如环境温度、风速等也会对测量造成一定的影响,这些因素都限制了超声波测距在一些对测量精度要求较高的场合的应用。
4 结论与展望
本系统有效的测距范围是2cm~3.0m,测距精度±1cm,较好地实现了预定的功能。是微电子产品应用的一例,符合测量工具小型化、集成化、智能化的发展要求,希望本课题的研究能够对传统测量工具的改进和创新有一定的作用。
由于设计经验的不足和所掌握知识的限制,系统的某些功能设计构想还没有完整的表达出来,硬件电路、软件部分都还存在着不足和需要改进的地方。
①需要进一步提高系统硬件电路的整体性能以及抗干扰的能力。②测量范围与发射功率直接相关,由于超声波探头功率有限,本系统只能在小范围内使用;更换成大功率探头,测量范围将扩大。③要满足更高的精度要求,还必须进行适当的改进;在某些特殊场合的应用中,还要考虑超声波的入射角、反射角以及超声波传播介质的密度、表面光滑度等因素。
可以相信,随着超声波传感器机械结构的改进和制作工艺的提高、驱动电源与接收电路设计的完善以及测量方法的更新,超声波测距测速系统的适用范围还会进一步扩大。
[1]张福学.现代实用传感器电路[M].中国计量出版社,1997:37-44.
[2]李丽霞.单片机在超声波测距中的应用[J].电子技术,2002(06):7-9.
[3]王安敏,张凯.基于AT89C52 单片机的超声波测距系统[J].仪表技术与传感器,2006(06):44-49.
[4]胡向东,刘京城,余成波,等.传感器与检测技术[M].机械工业出版社,2008:21-29.
[5]Shirley PA.An introduction to ultrasonic sensing[J].Sensors,1989(11):15-21.