城市轨道交通安全门系统门控单元设计
2014-11-29夏德春魏耀南曹青元
陈 栋,夏德春,魏耀南,曹青元
(1.中国铁道科学研究院 电子计算技术研究所,北京 100081)(2.北京经纬信息技术公司,北京 100081)
城市轨道交通安全门系统是集建筑、机械、电子和控制等学科于一体的复杂分布参数控制系统。安全门系统是安装于轨道交通车站站台边缘,用以提高运营安全系数、改善乘客候车环境、节约能源、节约运营成本的一套机电一体化设备。安全门系统由机械部分(门体结构和门机系统)和电气部分(电源系统和控制系统)组成,而控制系统尤其是门机控制单元是安全门正常工作的核心部分。
1 门机控制单元组成与功能
门机控制单元(DCU)是滑动门电机的驱动和控制装置。每道滑动门单元均配置一套门控单元,控制两扇滑动门动作。DCU主要是由CPU组、存储单元、接口单元及相关软件等组成;DCU配置了LCB的控制输入接口、门状态指示灯和冗余的现场总线接口,以及用于接收中央控制盘(PSC)下发的硬线开/关门命令的接口。门控单元主要实现如下功能:执行系统级和站台级发来的控制命令;能够采集并发送门状态信息及各种故障信息;通过DCU内设置的编程/调试接口,可在线和离线调整参数和软件组态,并可进行重新编程和参数的重新设置,具有本控制单元的可离线调试功能;DCU能对门状态指示灯进行正确控制,灯的状态包括:闪、常亮、常灭。
2 门机控制单元电气原理图
安全门的门机控制单元采用一控两驱的设计原理,从结构上包括门机驱动器(JWPD)和门机控制器(JWPC)以及外围输入输出设备。其中控制器采用高性能互联型处理器STM32F107作为开发平台,提供与中央控制盘的硬线连接接口以及上位机监控系统通信的MODBUS总线接口,并连接电磁锁、接近开关、状态灯和蜂鸣器等外围设备。驱动器采用大容量处理器STM32F103作为开发平台,通过CAN总线接口连接到控制器,负责无刷直流电机驱动算法的实现以及滑动门状态数据的反馈。电气原理图如图1所示。
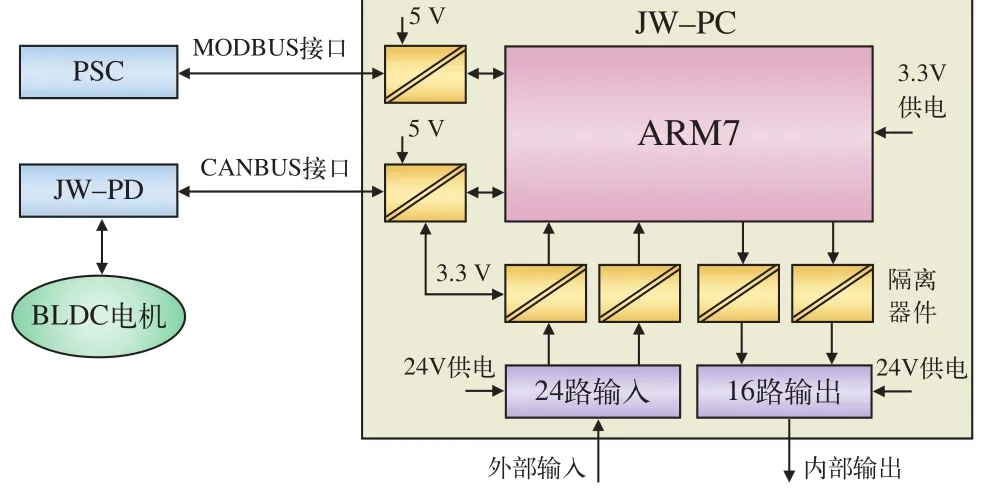
图1 门机控制单元电气原理图
运动控制系统提供与PSC的MODBUS通信接口,通过MODBUS模块接收上位机指令和反馈状态,运动控制模块根据控制指令和当前设备状态判断出对门体的运动指令并通过CAN模块发送到JWPD。屏蔽门在自动模式下,JWPC(AT-EB)接收来自PSC“自动开滑动门”和“自动关滑动门”的开关滑动门命令。在手动模式下,JWPC(AT-EB)接收来自“就地开滑动门”和“就地关滑动门”的脉冲开关滑动门命令。
3 门机控制单元的软件设计
3.1 运动控制
运动控制任务负责采集外围设备的状态数据进行逻辑判断,根据结果执行开关门操作。该任务必须能正确分析出遇阻、手动解锁等情况的发生,并做出相应处理。
门控单元开机后,需执行设备初始化过程,包括处理器外围资源的配置以及开关门运动曲线参数的生成。等待门体关门到位后执行任务主循环,为保证系统的实时性,该循环为每1 ms执行一次,通过读取输入端口和当前驱动器反馈的运动状态,对相应的标志或状态寄存器进行位置清零,动作执行部分按照标志或状态寄存器的值对外部设备做出相应的输出并且通过CAN总线对驱动器发出运动指令。远程更改功能可通过远程指令对驱动器进行配置,来屏蔽以及热保护。运动控制任务的流程如图2所示。

图2 运动控制任务流程图
作为运动控制部分的基础,开关门操作流程如图3和图4所示。在开门状态下,因不排除手动开关门操作,先判断当前是否已经开门到位,否则进入开门操作流程:首先进行提锁操作,根据微动开关的反馈信号,可以有效地判断出电磁锁的状态或错误;然后驱动电机关门,针对本设计所应用的无刷直流电机,以PI调节算法采用三闭环控制,包括电流环、速度环和位置环,具有噪音低,脉动转矩小,效率高等优点;门体开到位后退出开门状态。关门过程与开门过程相反,先驱动电机关门再执行落锁操作。
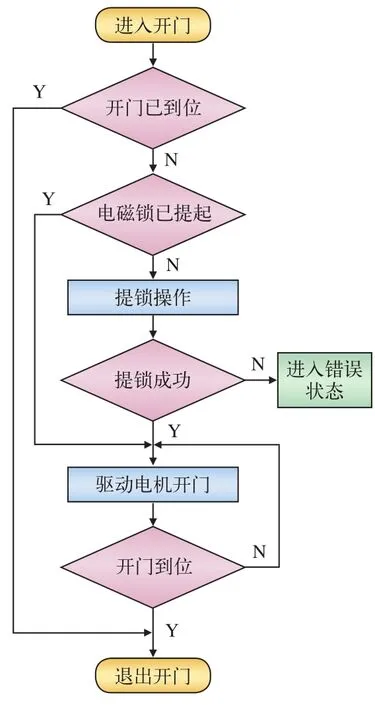
图3 开门操作流程图
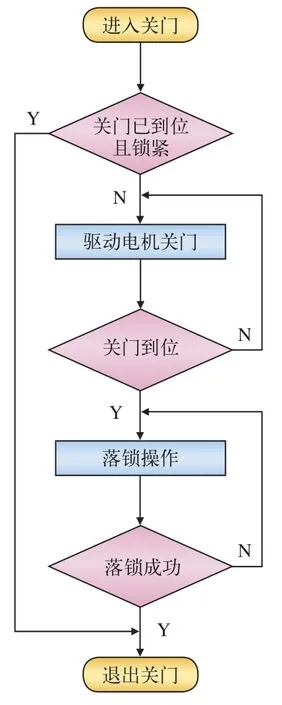
图4 关门操作流程图
3.2 CAN通信
CAN通信连接控制器和驱动器,采用了29位的扩展标识符,负责发送运动指令到驱动器并通过远程帧询问获取驱动器当前的运行状态。其中运动控制指令共包含7条,定义如表1所示。
CAN通信部分由接收任务和心跳任务构成。在接收过程中,由接收中断服务函数接收到报文并发送到接收消息队列,激活接收任务从中读取并复制报文做解析处理。在发送过程中,由心跳任务组织远程帧放入发送消息队列中,通过启动发送中断服务函数将消息队列中的报文全部发送出去,同时心跳任务记录驱动器反馈回来的报文次数,以判断CAN通信是否正常。接收任务和心跳任务的流程如图5和图6所示。

表1 运动指令表

图5 CAN接收任务流程图
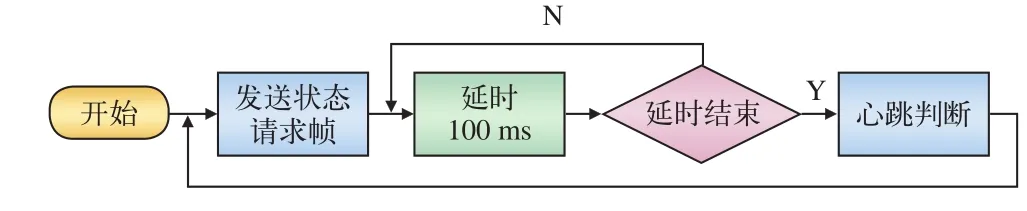
图6 CAN心跳任务流程图
3.3 MODBUS通信
MODBUS连接门机控制单元和上位机,遵循MODBUS RTU协议,主要完成的功能包括:远程控制、参数配置和监控。
门机控制单元采用USART实现总线接口,并且进行冗余设置,以上功能都是通过读写控制器中的寄存器实现的,支持的功能码为0x03、0x06和0x10。任务流程如图7所示。

图7 MODBUS通信任务流程图
4 试验验证
以单门净开度为950mm的安全门作为实验平台,对本文设计的门控单元进行了相关的试验验证,结果如图8所示。图中前半部分为开门运行曲线,门体以580mm/s的最大开门速度运行,整个开门过程时间为2.5 s,开门到位目标速度一直保持,防止乘客拉门后能够还原到开门到位位置;后半部分为关门运行曲线,门体以510mm/s的最大关门速度运行,整个关门过程时间为3 s。开关门时间可通过更改最大开关门速度无级调整。
从图中的曲线可以看出,电机驱动的内部目标曲线与反馈速度曲线的波形其本一致,说明门机控制单元能较好的实现安全门的控制。
5 结束语
本文以安全门门机控制单元为研究对象,通过在净开度为950mm安全门样机上进行验证,结果证实门控单元能较好的实现安全门的控制。同时,该系统也可以提高安全门运行的可靠性,降低安全门门控单元的成本。该系统已于2012年在台湾捷运地铁项目中安装并投入使用,运行安全稳定。
[1]黄中全. 轨道交通站台安全门控制系统[J]. 自动化与仪器仪表,2009 (3):64-66.
[2]贺 文,王 飞,陈 庆,林 磊. 城市轨道交通站台屏蔽门中央控制盘的研究[J]. 机车电传动,2011(4):44-47.
[3]李凌志.基于DSP的无刷直流电机伺服控制系统[J]. 机电一体化,2007,24(5):66-69.
[4]劳运敬. 地铁屏蔽门控制系统的研究[D]. 广州:华南理工大学,2011.
[5]旷文珍. 铁路车站分布式计算机联锁系统[J]. 中国铁道科学,2012,33(5):139-143
[6]郭 寅,刘常杰,刘 刚,等. 机车车辆静态限界非接触式自动测量系统[J]. 中国铁道科学,2013,34(1):134-138.
[7]尹盼春. 地铁屏蔽门控制系统的设计[D]. 南京:南京理工大学,2010.
