惯性陀螺仪定位三维测量技术在非开挖电力管线探测中的应用
2014-11-28任广振罗进圣
任广振,罗进圣,胡 伟
(国网浙江省电力公司杭州供电公司,杭州 310000)
0 引言
随着现代都市的飞速发展,地下管道网络系统日益发达,电力、电信、燃气、给排水、雨污水等各类管道蛛网密布,错综复杂。然而由于历史与技术原因,已建成的地下管线很少能够提供准确的管线位置与埋深,影响到日渐庞大的管网系统的管理与维护。如何精准的探测地下管线如电力管线的位置与埋深,已成为急需解决的问题。
传统管线探测方法多采用物探方法[1-2],或利用电磁场感应金属管线的位置与埋深(如管线仪探测),或利用管线与周边介质的物性差异进行探查(如地质雷达探测)。这些方法虽有其优势之处,但往往受制于管线材质、埋设深度、环境干扰、定位精度等因素,使其测量精度大打折扣。而电力管线常采用非开挖定向穿越,其埋深往往超越现有仪器的探测范围,更是使得这些方法英雄无用武之处。
惯性陀螺定位仪三维定位技术是近年来出现的一项管线测量新技术。它结合了陀螺仪定向、惯性导航、计算机三维计算等技术,拖曳惯性陀螺定位仪穿行于待测管线,自动追踪记录其在管线内的运动轨迹,生成管道中心轴线的三维坐标与位置图。测量时受管线材质、管线埋深、周围环境和地质影响较小,只要惯性陀螺定位仪能够穿行于待测电力管线,即可实现高精确度的管线测量。
1 惯性陀螺定位仪工作原理
1.1 陀螺仪定向原理
惯性陀螺定位仪交叉利用了重力场、计算机矢量计算等多学科知识,其核心原理为陀螺仪定向及惯性导航。
陀螺是一个绕某一支点作高速旋转的刚体。当陀螺高速旋转时,其旋转轴所指方向在不受外力影响的情况下是不会改变的,人们由此制造出了陀螺仪。陀螺仪在角动量守恒原则下,具有两大特性:
(1)定轴性。当陀螺转子高速旋转时,就产生了惯性,这惯性使得陀螺转子的旋转轴保持在空间指向一固定方向,同时反抗任何改变转子轴向的力量,如图1所示。

图1 陀螺仪的定轴性
(2)进动性。当陀螺转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直,如图2所示。

图2 陀螺仪的进动性
根据陀螺仪的定轴性和进动性,可确定运动物体在惯性参照系中的方向和姿态。
1.2 惯性导航原理
惯性导航系统包括陀螺仪、加速度计及计算机。开始时,外界给系统提供初始位置及初始速度,此后系统通过不断检测自身的瞬时角速度和瞬时加速度,可以确定自身的位置变化(如向东或向西的运动)、速度变化(速度大小或方向)和姿态变化(绕各个轴的旋转),通过积分不断更新系统当前位置及速度。
陀螺仪在惯性参照系中用于测量系统的角速度。通过以惯性参照系中系统初始方位作为初始条件,对角速度进行积分,就可以得到系统的当前方向。
加速度计在惯性参照系中用于测量系统的线加速度,由于加速度计与系统固定并随系统转动,不知道自身的方向,只能测量相对于系统运动方向的加速度。
通过系统的当前运动方向及相对于系统运动方向的当前线加速度,就可以确定参照系中系统当前的惯性加速度向量。以起始速度作为初始条件,对惯性加速度进行积分就可得到系统惯性速度,然后以起始位置作初始条件再次积分就可得到惯性位置。
1.3 惯性陀螺定位仪
惯性陀螺定位仪正是运用了陀螺仪和惯性定位原理而研制的,其结构如图3所示。

图3 惯性陀螺定位仪结构
陀螺仪确定系统瞬时方向,加速度计确定系统瞬时前进方向加速度值,由此可求得定位系统的瞬时加速度向量α,将α分解到惯性坐标系X,Y,Z三轴上可得各自的加速度分量αx,αy,αz。分别积分并与X,Y,Z三方向上的初始速度Vx0,Vy0,Vz0相加即可得到定位系统的当前速度分量 Vx,Vy,Vz。 再将 Vx,Vy,Vz进行积分计算,与初始坐标相加即可得定位系统的当前坐标位置。电子单元不断记录其运动轨迹数据,通过数据链传输至计算主机,根据起终点三维坐标数据计算其运动实时三维坐标。
2 DuctRunnerTm DR-HDD-4.2惯性陀螺定位仪
Reduct公司生产的DuctRunnerTmDR-HDD-4.2系列惯性陀螺定位仪如图4所示,是当前国际上最先进的惯性陀螺定位仪。可用于测量4~150cm管径的各类管线,提供高精度、连续的管线三维坐标,平面测量精度可达0.25%L(测量管线的总长度),高程测量精度可达0.10%L,在国内已逐步应用于工程实例。

图4 DUCT RunnerTmDR-HDD-4.2惯性陀螺定位仪
其主要结构包括:
(1)测量单元。以陀螺仪惯性定位为核心技术的三维定位装置,用于穿行各类管线,连续测量管线的高精度三维坐标,并记录于内部计算机。
(2)PC处理系统。内建专业处理软件,分析计算测量单元所测量的数据。
(3)网络线。测量单元所测数据,通过网络线传输至PC处理系统。
(4)控制器。实现对测量单元的开启关闭及监控。
(5)支架与轮组。通过不同尺寸的支架与轮组,可适应不同管径的管线测量需要。
3 惯性陀螺定位仪工作流程
惯性陀螺定位测量主要包括前期准备、辅助测量、惯性陀螺定位测量、数据处理等工作,其主要工作流程见图5。
(1)前期准备。现场踏勘,确定测量方案;清理场地,满足工作要求;检查仪器,保证工作顺利进行。
(2)地形测量及测区纵横断面测量。测绘测区地形图及管线穿越路径的地面纵、横断面,为管线测量成果提供地形资料。
(3)管线起终端点测量。精确测量待测管线起终端点的三维坐标,作为惯性陀螺定位测量的起算校核资料,计算校核管线的三维坐标。
(4)惯性陀螺定位测量。将测量单元直接置于管线内,采用置中技术使测量位置为管线中心轴线,设定参数,拖曳惯性定位陀螺仪测量主机由管线进口行至出口,由计算主机自动记录计算其运动轨迹(见图6)。

图6 惯性陀螺定位仪工作示意
(5)现场处理及质量判断。现场数据处理,评估数据质量及精度,确定是否需复测。
(6)数据后处理。将测量单元所记录的测量数据导入专用计算机系统,输入管线进出口三维坐标,由软件自动计算得到管道中心轴线的三维坐标。并生成XY,YZ,XZ视图及三维视图。
(7)成果提交。编制报告及图件,提供管线测量成果。
在地面模拟试验时,架设管线,模拟地下电力管线的形态,分别采用传统全站仪测量及惯性陀螺定位测量方法,确定管线三维坐标。通过比较2种方法的测量结果,检验惯性陀螺定位测量的精度。惯性陀螺定位测量管线本身测量平面偏差在0.25%L以内,高程偏差在0.10%L以内,自符合精度较高。惯性陀螺定位测量与用全站仪测量,平面最大偏差为0.174 m,高程最大偏差为0.094 m,偏差较大的位置均出现在曲线弯曲较大的地方。
通过对比表明,与传统方法比较,惯性陀螺定位仪测量精度仍能保持在较高水平,检查误差较小,数据准确可靠。
4 工程测量实例
4.1 管线概况
杭州市拱墅区沈半路桃源新区1号井—2号井段电力管线采用非开挖水平导向钻进方法穿越敷设,长度约123 m,管线埋深由浅至深约在1.5~8 m。由于埋深较深、地质情况不佳,传统探测方法较难测量其准确位置,因此拟采用惯性定位陀螺仪测量其位置。现场环境较好,现有电力管线虽已运行,但预留有空管,可供惯性定位陀螺仪穿行测量。
4.2 辅助测量
非开挖电力管线起终端点均采用网络RTK方法测量,测量历元30次,平面收敛精度不大于0.01 m,高程收敛精度不大于0.03 m。表1中X表示该点的平面北坐标、Y表示该点平面东坐标、H表示该点高程,坐标为杭州市坐标系,高程为1985国家高程系统,其坐标值是通过陀螺仪进出口预先测定的坐标值计算得出的结果。

表1 非开挖电力管线起终端点
4.3 惯性定位作业
现场操作步骤:选择适合于拟测量管道的测量主机及轮组,并将轮组编号输入系统;测量主机开机;用牵引绳将主机拖入管道;从远端拉动牵引绳,将测量主机从管道远端拉出;将主机记录的测量数据导入专用计算机系统,并将管道2个端点坐标输入系统;自动计算得到管线中心轴线的三维坐标。
工作中将惯性陀螺定位仪从A至B选择一孔(轨迹1)来回拖拉各测量2次,共测量4组数据,采样间距1 m,4组测量成果分别连接拟合线位,比较误差,计算其方差。选择邻近另外一孔(轨迹2)重复上述工作。若符合仪器限差(平面误差:0.25%L,高程误差:0.10%L),则由4组测量成果平差拟合为1组数据。
惯性陀螺定位作业完毕后,将测量数据传输至PC处理系统,计算校核管线轴线的三维坐标。惯性陀螺定位测量管线位置轨迹1见图7。
4次测量成果平面最大较差0.08 m,高程最大较差0.07 m;平面相对中误差0.03%L,高程相对中误差0.03%L。
4.4 现场开挖验证
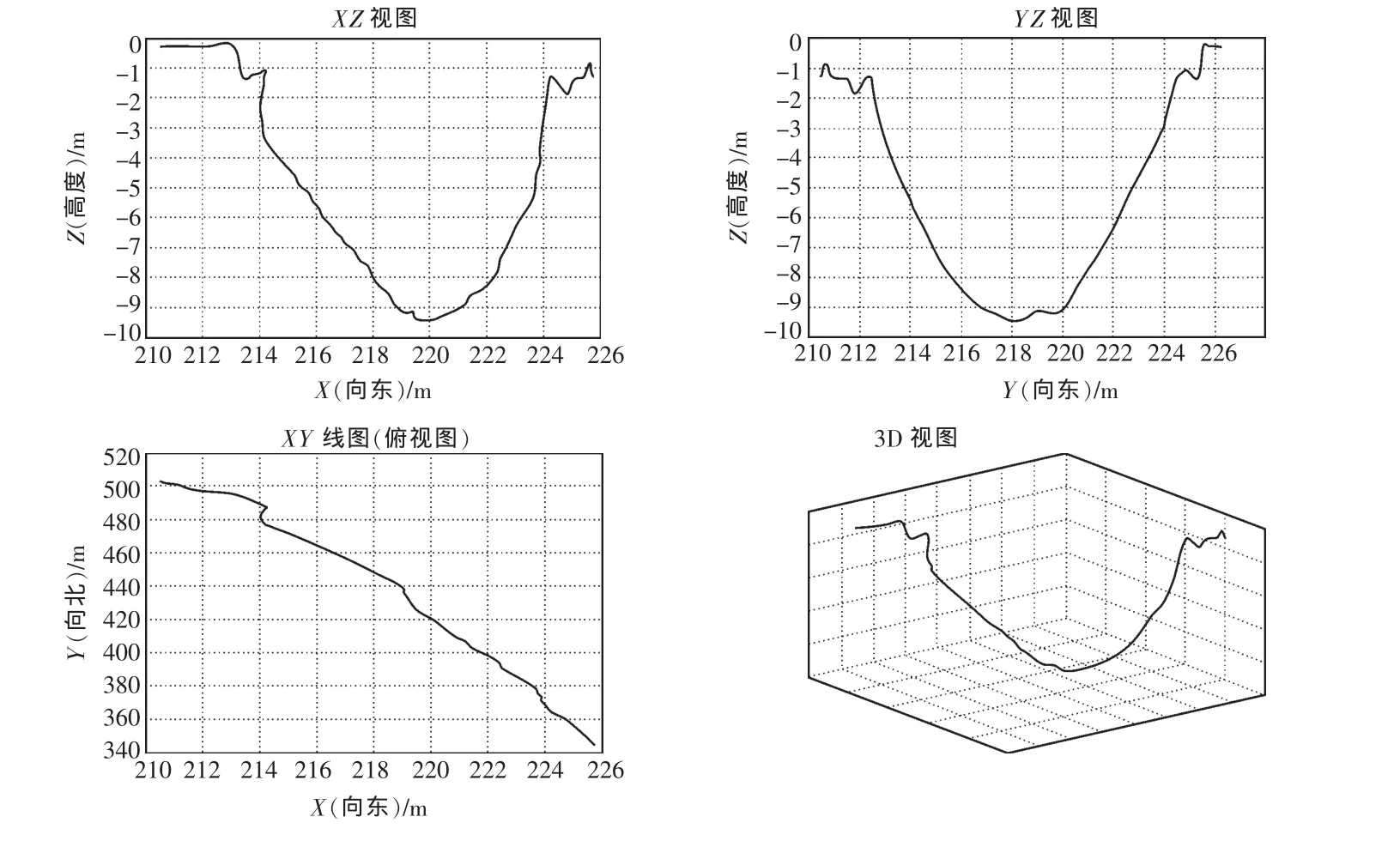
图7 惯性陀螺定位测量轨迹1管线位置图

表2 开挖结果
为验证惯性陀螺定位仪的实际测量精度,对所测的非开挖电力管线进行了2处开挖验证,开挖深度分别为2 m和4.5 m。开挖结果见表2。
从工程实例中可以看出,惯性陀螺定位不受环境电磁波及地层等干扰因素影响,测量精度高,定位准确可靠,所测量数据,除入口与出口点坐标由传统测量方法获得,其余数据皆由设备自行运算,消除人为误差,并可重复验证,可以解决非开挖电力管道的准确测量问题。
5 结论
惯性陀螺定位测量采用陀螺导航定向技术,并将测量设备直接置入管内,采用置中技术测量管道中心轴线位置,所以在目前已知的非开挖测量技术中,其测量精度最高。
该系统工作时无须操作人员于地面进行追踪定位,所以不受地面环境、交通、天气、光线等影响,理论上讲可以24 h全天候进行作业。
由于惯性陀螺定位仪采用的是管内直接测量法,要求必须能够穿行于管线中,因此,较适合测量新建成未运行管线。对于现有运行管线,必须有预留空管方能测量,一些老旧管线如被淤泥堵塞而不能穿行时,同样也不能进行测量。
惯性陀螺定位仪三维测量技术不受管线材质、管线埋深、周围环境和地质情况等因素影响,特别适用于非开挖定向钻入敷设管线的探测工作,能够测量出待测管线的精确三维坐标,为管线管理及维护提供准确可靠的基础资料。
[1]张汉春.非开挖特深管线的探测技术分析及展望[J].地球物理学进展,2010(6)∶1092-1093.
[2]黄迁辉,温俊涛.非开挖技术在城市建设中的作用[J].非开挖技术,2010,4(1)∶81-82.
