大型船舶在狭水道浅水域航行的水动力特性
2014-11-28李宇辰韩晓光
吴 晞, 李宇辰, 韩晓光
(海军陆战学院,广州 510430)
大型船舶在狭水道浅水域航行的水动力特性
吴 晞, 李宇辰, 韩晓光
(海军陆战学院,广州 510430)
为研究大型船舶在狭水道浅水域航行时的水动力特性,应用三维频域势流理论对某大型船舶在不同航速、不同水深吃水比下的附加质量力(力矩)进行计算。在此基础上,通过时域分析方法进一步计算船舶航行时船体在特定的风、浪、流的综合作用下富余水深随时间的变化曲线。最后,全面总结航速、水深对附加质量力(力矩)影响的变化规律,为大型船舶在狭水道浅水域中航行的水动力特性研究、最佳航速的选择以及航行安全等提供参考。
水路运输;大型船舶;狭水道;浅水;水动力
船舶日益大型化是现在世界船舶发展的主流趋势,然而,随着船舶吨位的不断增加,航道相对变窄、水域相对变浅已成为一种普遍现象。[1]在深水、开阔水域航行性能良好的船舶在进入狭水道浅水域航行时,因其周围流场发生变化,将导致船舶整体性能下降。因此,研究船舶在狭水道浅水域的水动力性能是很有必要的。目前,研究船舶水动力性能的方法一般有3种:理论计算、水池试验以及实船试验。由于目前国内具备浅水试验能力的水池较少[2],进行对试验环境要求如此苛刻的实船试验的危险度也较大,因此仅应用理论的计算方法对问题进行研究。
理论计算方法的研究经历了大半个世纪,现已取得重大突破。从二维理论发展到三维理论,从频域分析发展到时域分析,从线性假设发展到非线性处理,计算的范围不断扩大,理论日趋成熟,尤其是随着高速化大容量计算机的出现,三维流体动力的数值计算得到了迅速的发展。[3]目前,在用三维水动力理论求解辐射-绕射问题时一般采用格林函数法[4],该方法计算简便,且能真实反映船舶周围的流场情况,具有良好的计算精度,应用最为广泛。本文使用该方法对大型船舶在狭水道浅水域航行的水动力特征进行仿真研究,通过计算,分析并总结规律。
1 理论[5-7]概述
1.1基本条件
基本条件为:船体周围的流体是均匀、无黏性、无旋、不可压缩的理想流体,入射波为微幅规则波。
1.2三维流场中速度势的分解
根据线性假设,船舶在波浪中运动的流场速度势可根据叠加原理分为定常势和不定常势两部分。其中不定常势又可分解为入射波势、辐射势和绕射势三部分,这样有式(1)成立。
(1)
式(1)中:ΦI为入射势;ΦR为辐射势;ΦD为绕射势;φ0为已知的入射波势;ω为波浪的遭遇频率;ηj为第j个运动模式的运动复幅值;φj为第j个运动模式单位幅值的摇荡运动的速度势。
1.3速度势的求解
速度势所满足的条件有


(z=0,j=1,2,3,4,5,6,7)

(2)
式(2)中:n为物面上点的广义法向量;[L]为控制方程;[S]为物面条件;[F]为线性化的自由表面条件;[B]为底部条件;[R]为远方的辐射条件。
辐射势和绕射势可通过三维源汇分布理论,采用边界元法求解。求解出速度势之后便可通过相应的积分运算求得相应的水动力系数,并得到作用于船体的流体力。具体过程在此不作过多推导。[8]
1.4时域运动方程的建立
在随船平动坐标系中,船体运动的时域方程为

Fw(t)+Fw+Fc+Fsn(t)
(3)
式(3)中:M,m为广义质量矩阵和附加质量矩阵;K(t-τ)为延迟函数矩阵;C为静水恢复力系数矩阵;Fw(t),Fw,Fc,Fsn(t)为一阶波浪力、风力、流力以及二阶波浪力。求解船体运动的时域方程,可得船体运动时历。
2 数值计算模型和结果分析
2.1计算模型
通过上述计算方法对某大型船舶在狭水道浅水域的航行状态进行仿真,船型主尺度为:总吨位17万,船长270 m,船宽50 m,吃水16 m,舷高28 m。通过结构点文件输入船体的型值点,将船体每站的型值点通过样条曲线连接起来,最后通过放样及相关体操作完成几何建模。模型完成后,对其进行网格划分,将船体离散为四边形或三角形的曲面单元。考虑到计算精度的要求,划分网格时应尽可能地离散成四边形单元。此处对船体以及水道划分的总网格数为6 578个,其具体模型见图1和图2。

图1 船体几何模型
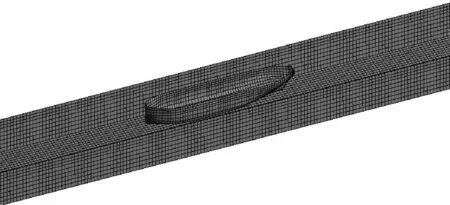
图2 网格模型
计算时,船体模型的总重量、重心以及对重心的惯性矩应与实船一致。计算结果分为两部分,即频域的附加质量力(力矩)的计算和富余水深的时域仿真。时域计算的环境参数为:
1) 波浪,选用Stokes二阶波[9]作为入射波模型,波高2 m,波浪周期为14 s,入射角度为180°(顶浪)。
2) 均匀风,速度为10 m/s,入射角为90°。
3) 均匀流,速度为1 m/s,入射角为0°。
2.2结果分析
根据第1节的计算方法,对船舶在狭水道浅水域以不同航速及不同的水深吃水比的条件航行时的附加质量力(力矩)进行计算分析。因篇幅有限,仅选用m22,m33,m44,m35进行说明(需要说明的是,此处计算的附加质量力(力矩)是在某一个自由度上发生单位运动所造成的附加质量力(力矩)值)。
为说明水深的影响,这里图示不同波浪频率下附加质量力(力矩)随水深吃水比的变化曲线。由图3~图5可以看出,这种变化首先是与波浪频率有关的,总体而言,当水深吃水比lt;4时,附加质量力(力矩)曲线变化幅度明显;当水深吃水比gt;4后,附加质量力(力矩)曲线随深水吃水比的增大而逐渐减弱并趋于平直,这时水深对附加质量力(力矩)的影响可以忽略。
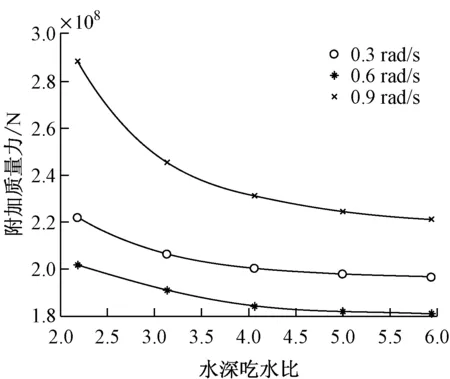
图3 不同波浪频率下m22随水深吃水比的变化曲线
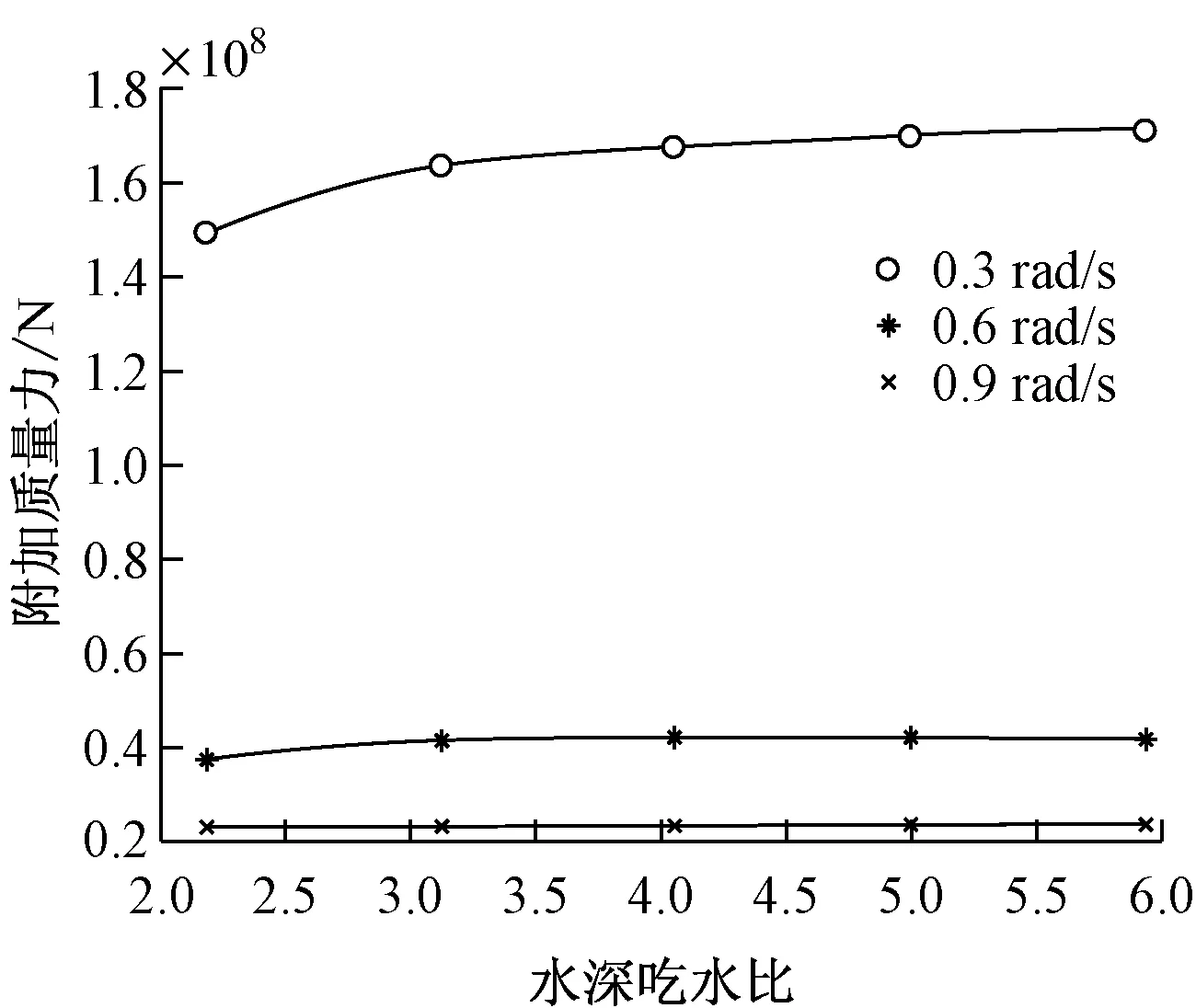
图4 不同波浪频率下m33随水深吃水比的变化曲线
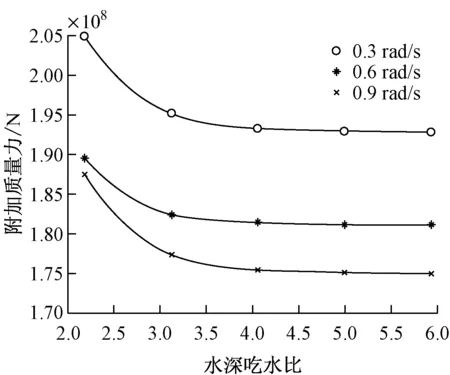
图5 不同波浪频率下m44随水深吃水比的变化曲线
为说明不同航速对附加质量力(力矩)的影响,图示了不同航速下附加质量力(力矩)随波浪频率的变化曲线。由图6~图9可以看出,附加质量力(力矩)的变化与航速及波浪频率有关。就总体趋势而言,低频状态下变化幅度明显,当频率增加到一定大小后,变化趋势逐渐平缓;m22和m44随航速的增大而减小;m33在低频时随航速的增大而减小,高频时随航速的增大而增大;m35则随航速的增大而增大。
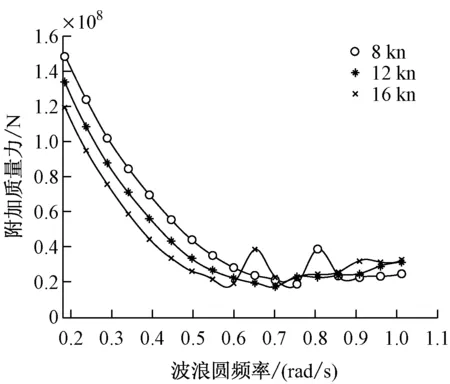
图6 不同航速下m22随波浪频率的变化曲线

图7 不同航速下m33随波浪频率的变化曲线
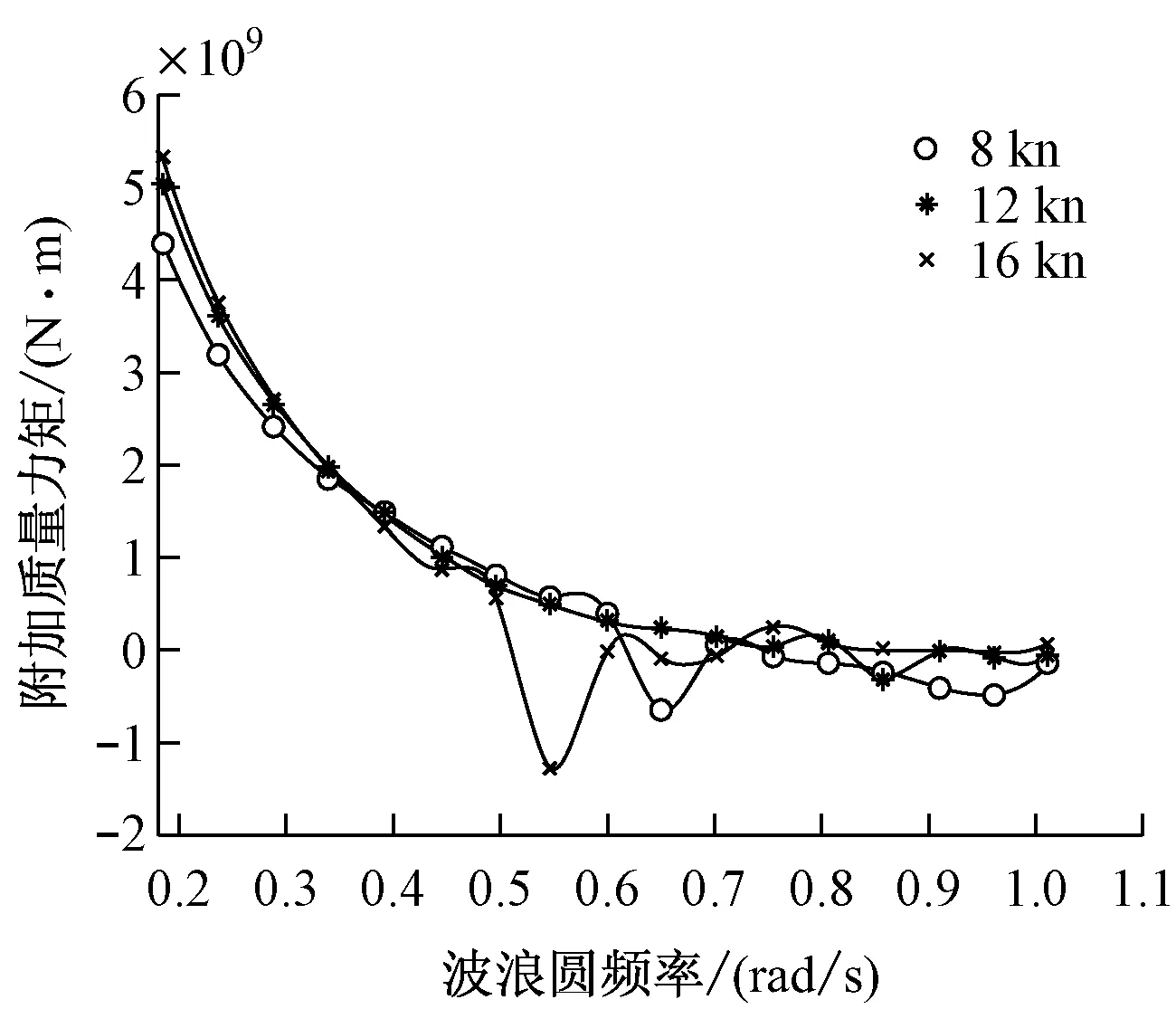
图8 不同航速下m35随波浪频率的变化曲线
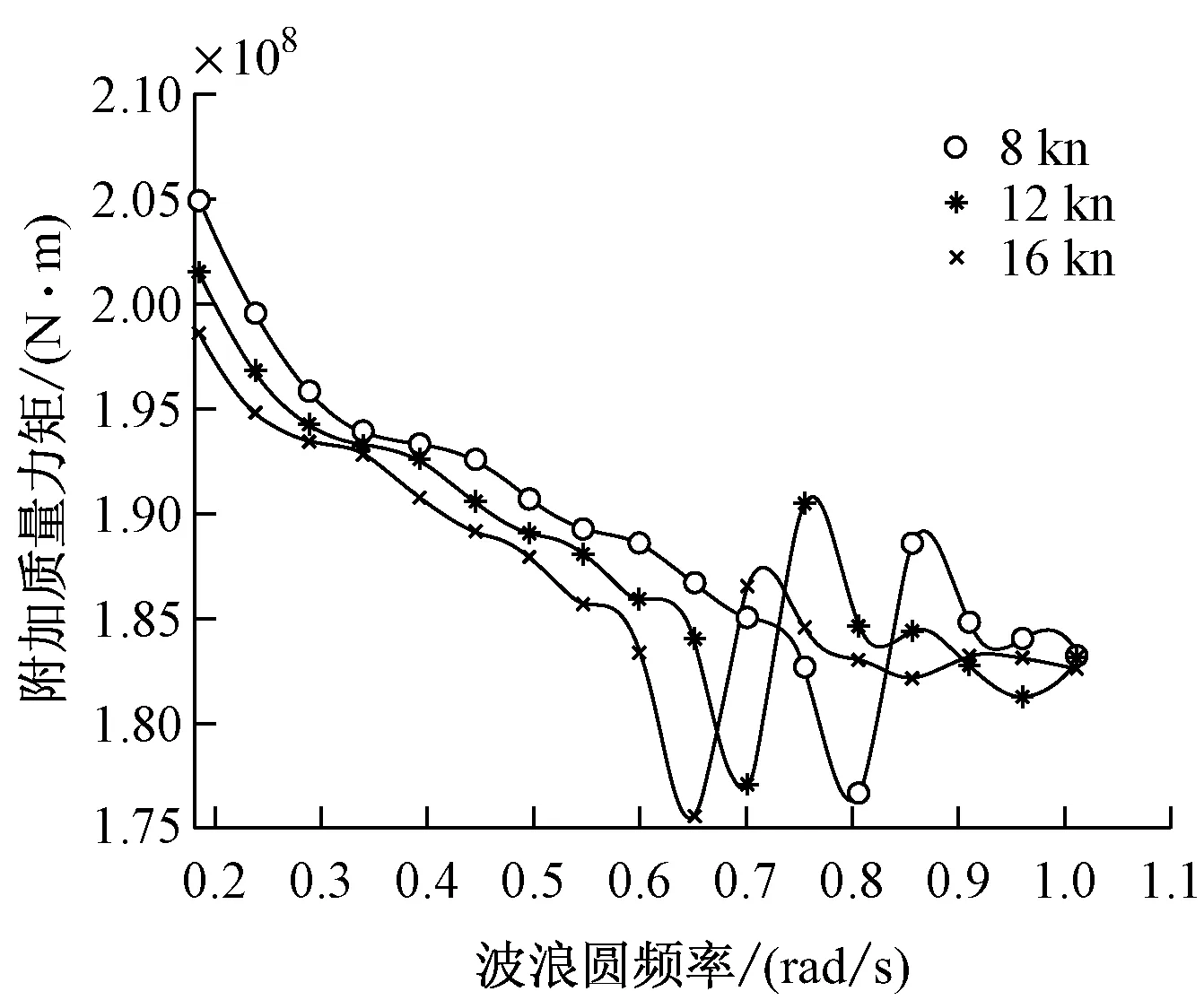
图9 不同航速下m44随波浪频率的变化曲线
大型船舶在进入狭水道浅水域航行时,船舶周围流场会发生变化,进而会使通过船底下面和船舶左右两侧的水流段面积减小、流速增加,致使船舶阻力增加、船底压力下降、船舶的浮态发生变化、船体下沉、纵倾变化和操纵性能变差。为避免船舶触底、搁浅或失控,船舶指挥人员在进入该水域前应对船舶在该水域航行时的富余水深进行充分了解。基于此,通过时域的分析方法对此船在狭水道浅水域航行时富余水深的时历曲线进行了仿真研究(水深吃水比为1.75,仿真时间为2 min),结果见图10。
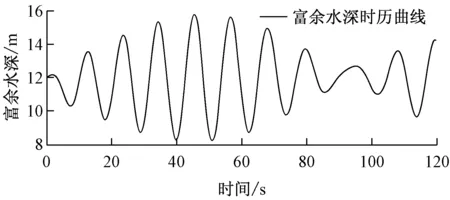
图10 富余水深的变化曲线
3 结 语
应用三维势流理论研究某大型船舶在狭水道浅水域中航行时,在不同航速、水深吃水比下水动力的变化规律,并在此基础上采用时域分析方法计算了此船在特定环境要素下航行时的富余水深随时间的变化曲线,解决大型船舶在狭水道浅水域状态下航行时的水动力计算问题,对船舶在狭水道浅水域的航行具有一定的指导意义。不过,该仿真研究仍存在不足,如实际水道情况复杂,不能简单地以规则面代替;实际波浪是随机的非线性波而非规则的微幅线性波[10]。这些不足是下一步研究的重点。
[1] 陈宏.狭水道浅水域航行富余水深的确定[J].集美大学学报:自然科学版,2009,14(1):48-51.
[2] 吴晞,郑环宇,曹之新.浅水域对瘦长型舰船操纵性的影响[J].航海技术,2009(3):2-6.
[3] 戴仰山,沈进威,宋竞正.船舶波浪载荷[M].北京:国防工业出版社,2007.
[4] 戴遗山. 舰船在波浪中运动的频率与时域势流理论[M].北京:国防工业出版社,1998.
[5] 夏国泽.船舶流体力学[M].武汉:华中科技大学出版社,2003.
[6] 刘应中,谬国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1987.
[7] FALTINSEN O M.Sea Load on Ships and Offshore Structures[M].上海:上海交通大学出版社,2008.
[8] CAO Yu, YU Baojun, WANG Jianfang.Modeling the Seakeeping Performance of Luxury Cruise Ships[J].Marine Science,2010(9):292-300.
[9] 王科.新波浪理论在系留船舶二阶波浪力计算中的应用研究[J].船舶力学,2008,12(1):1-11.
[10] 李积德.船舶耐波性[M].哈尔滨:哈尔滨工程大学出版社,2007.
HydrodynamicCharacteristicsofLargeShipsSailinginNarrowandShallowChannels
WUXi,LIYuchen,HANXiaoguang
(Navy Marine Academy, Guangzhou 510430, China)
For studying the hydrodynamic characteristics of large ships sailing in narrow and shallow channels, the added mass forces(moments) of a large ship in different speed and water depths are calculated by means of three dimensional frequency domain potential flow theory. The curves of UKC vs time under the combined action of given wind, wave and current are further calculated, using the time domain analysis method. The comprehensive influences of the ship speed and water depth on the added mass force (moment) are summarized. Some guidance on optimizing ship speed and improving navigation safety are given.
waterway transportation; large ship; narrow channel; shallow water; hydrodynamic force
2014-04-29
吴 晞(1958—), 男,福建闽侯人,教授,主要从事舰船操纵与耐波性研究。 E-mail: gamiliyuchen@163.com
1000-4653(2014)03-0100-04
U611.32;U675.5+2
A
