无轴承异步电机动不平衡振动补偿控制
2014-11-25詹立新
詹立新 周 凯
(清华大学机械工程系 北京 100084)
1 引言
无轴承电机是一种将磁轴承和电机融合为一体的新型电机形式。与传统磁悬浮电机机理不同,它利用磁轴承定子结构与交流电机定子结构的相似性,将转矩绕组和悬浮绕组一起绕进电机定子[1,2]。电机的磁悬浮控制以转矩绕组提供的气隙磁场为偏置磁场,通过调制悬浮绕组电流来调制电机转子所受的磁悬浮力,从而达到让电机转子悬浮运转的效果。无轴承电机运行时无机械接触,适合应用于高速及超高速运转场合,因而在机床电主轴、高速离心设备、涡轮分子泵、飞轮储能等领域具有重要的研究价值和应用前景[3]。目前,有关学者已经提出了若干种类型的无轴承电机,如感应型、表贴永磁型、内插永磁型、内埋永磁型,交替极型、同极型、混合极型以及同步磁阻和开关磁阻型等[3]。其中,笼型无轴承异步电机以其结构简单、可靠性高、易于弱磁以及能够产生较大悬浮力[4]等特点,成为开展研究最早、最为广泛的类型之一。
然而,对无轴承电机转子来说,即使加工精度非常高,仍然不可避免地存在质量偏心。旋转时由于转子质量偏心产生的离心力与转速的平方成正比,因此即使是非常小的偏心量,也会在高速旋转机械中产生很大的离心力,导致不平衡振动,从而影响悬浮的精度和品质。一方面,由于质量不平衡产生的电磁振动力会经过气隙传递给机座,产生噪声,同时振动还会影响电机系统的运行性能,使无轴承电机转速进一步提升受到限制;另一方面,由于位移传感器检测到的信号为振动信号,此振动信号经位移负反馈送入控制器,会导致功率放大器的电流饱和,这就对功放要求较高,同时电流增大严重时还会烧毁整个控制回路。所以,能否有效克服无轴承电机转子的周期性离心力影响,将是无轴承电机能否在超高速领域广泛应用的关键之一。
目前,磁轴承的不平衡补偿研究已经经历了二十多年的时间,相关学者结合了许多控制理论方法,提出了很多种不平衡振动补偿策略[5-13]。这些方法大致可以分为两类:
(1)电流最小控制。在一定的转速下减小转子的刚度和阻尼,使转子围绕其惯性轴旋转,从而减小或消除振动力,此时功放中的控制电流振荡最小。这个策略的优点是,由于转子的偏心不会很大,只要保证气隙足够大,总可以使振动力无法传递到基座上。但是由于这种控制策略要求转子刚度较小,故不能应用到高精度的场合,这也是限制其发展的一大缺点。
(2)位移最小控制。在一定转速下,增加悬浮转子的刚度和阻尼,使转子围绕其几何中心旋转,从而达到减小和消除振动的目的。这一策略具有高精度、高阻尼的特点,因而应用于对转子旋转精度要求较高的场合,但是有振动力产生,因此不能完全阻止定子和机座的振动[14]。
无轴承电机虽和磁轴承电机存在某些相似性,但其悬浮运行控制方法仍有很大的差别,无轴承电机控制更为复杂。针对无轴承电机周期性旋转惯性振动控制方面的研究成果还很少见到。文献[15]提出了基于前馈补偿控制器的无轴承永磁同步电机转子质量不平衡补偿方案,推导了存在质量不平衡时的转子运动方程,但是没有得出闭环控制下无轴承电机转子的运动轨迹方程;其以转子振动信号作为补偿信号,只是对周期性振动的开环补偿,且文中仅进行了仿真实验研究。文献[16]提出了一种应用于无轴承开关磁阻电机的基于最小均方算法(LMS)的自适应凹陷滤波器的转子质量偏心补偿控制方案,其实现了电流最小控制,使转子绕其惯量轴旋转,从而达到消除不平衡振动力的目的,但文中并未对无轴承开关磁阻电机的位移最小控制进行研究。
针对上述问题,本文提出了一种基于前馈控制的无轴承异步电机动不平衡闭环补偿控制策略,通过在无轴承异步电机原有的悬浮控制系统上加上一个前馈控制,利用控制器产生一定的控制力来补偿转子不平衡离心力,强行约束转子围绕其几何中心轴旋转,从而达到转子振动位移最小的目的。该方法能够将转子的涡动半径控制到很小的范围,因而可以应用于对转子的旋转精度要求较高的场合。此外,本文阐述了无轴承异步电机不平衡振动的机理,并推导了存在质量偏心时无轴承异步电机径向位移环仅采用PID 控制下的转子运动学方程。最后,搭建了无轴承异步电机实验平台,实验结果表明所提出方法很好地抑制了无轴承异步电机不平衡振动,取得了较好的动态悬浮控制效果。
2 无轴承异步电机悬浮机理及数学模型
2.1 无轴承异步电机悬浮机理
本文所述的无轴承异步电机在电机的定子中嵌入了两套具有不同极对数的绕组,其中一套是四极转矩控制绕组,另一套是两极悬浮控制绕组。图1所示为无轴承异步电机悬浮机理示意图。

图1 无轴承异步电机悬浮机理Fig.1 Principle of bearingless induction motor
设与电机定子同轴的静止坐标系为xy 坐标系,且两套绕组的αβ 坐标系重合,并与xy 坐标系重合。如图1 所示,四极转矩绕组气隙磁场ψ1由励磁电流i1m产生,在没有负载的情况下,转子将位于中心位置,此时气隙中每一处的磁场强度都是相同的,即转子处于受力平衡的状态。如图1 所示,当两极悬浮绕组通以β 轴气隙磁场励磁电流im2β时,区域3中气隙磁场的强度将增大,区域4 中气隙磁场的强度将减弱,而区域1 和2 的气隙磁场强度依然相等。因此,转子所受麦克斯韦力的合力应朝向y 正方向。悬浮绕组通以反向的β 轴气隙磁场励磁电流则会产生y 负向的麦克斯韦力。同理,x 方向的悬浮力可通过悬浮绕组α 轴气隙磁场励磁电流im2α产生。因此,在悬浮绕组中分别通以α 轴和β 轴气隙磁场励磁电流,即可实现对无轴承异步电机转子xy 坐标系下悬浮力的控制。
2.2 无轴承异步电机数学模型
对于本文研究的无轴承异步电机,当转矩绕组采用矢量控制方式时,转子所受悬浮力可写成[17,18]

式中 r,l——转子半径和长度;
Lm2——悬浮绕组互感;
N1,N2——转矩绕组和悬浮绕组绕线匝数;
μ0——空气磁导率,μ0=4π×10-7;
ψ1d,ψ1q——转矩绕组气隙磁链在dq 坐标系下的分量;
γ——转矩绕组气隙磁场在dq 坐标系下的相角度,γ=arctan(ψ1q/ψ1d);
i2d,i2q—— 悬浮绕组气隙磁场励磁电流在dq 轴下的分量;
Kc——力电流系数,Kc=Kmψ1m;
ψ1m——转矩绕组气隙磁链值,
将式(1)变换到αβ 坐标系下,有

式中 im2α,im2β——悬浮绕组气隙磁场励磁电流在αβ 轴的分量;
θ2——转矩绕组气隙磁链相位角,θ2=θ1+γ,θ1为转矩绕组定子电流矢量逆时针方向的电角度。
考虑到无轴承异步电机转矩绕组和悬浮绕组都会在笼型转子上产生感应电流,而悬浮绕组在转子上产生的感应电流会导致悬浮绕组气隙磁场励磁电流矢量i2m并不等于悬浮绕组中实际电流矢量i2s,而是存在一个相位延迟[19,20]。设该相位差为φi,则在αβ 坐标系下有
将式(3)代入式(2),可得实际产生的悬浮力为

从式(4)可以看出,由于悬浮绕组气隙磁场励磁电流和其实际电流之间存在相位差φi,导致实际产生的悬浮力和原悬浮力指令之间也存在一个相位延迟;该相位延迟会导致实际控制悬浮力在xy 方向上的相互耦合。此外,φi会随着电机转速的增大而增大。由于该相位延迟的存在会导致整个悬浮闭环控制系统相位裕度减小,当转速增大到一定值时有可能会导致整个悬浮控制系统失稳。因此,在实际的悬浮绕组反馈闭环控制系统中,除了需要获取转矩绕组气隙磁链相位角,为了使系统稳定运行,还应对产生的悬浮力指令进行相位超前补偿。如何获取φi可以详细参见文献[19,20]。
以下为了简化分析,不妨令ix和iy为悬浮绕组反馈控制系统指令电流,且有

则由式(4)、式(5)可得

在转子存在偏心情况下,除上述可控悬浮力外,还存在由偏心引起的单边磁拉力,其表达式为

式中 Ke——力位移系数,
δ0——电机气隙长度。
因此,在转子存在偏心的情况下,无轴承异步电机转子所受的电磁力为

无轴承异步电机单个方向运动的动力学模型如图2 所示,如图所示,x 方向给定位移量同检测到的实际位移量比较,其差值通过PID 位移调节器产生悬浮可控磁悬浮力指令Fx*,用于克服单边磁拉力和外力。图2 中,Fwx为无轴承异步电机所受外力,其中一阶时间延迟环节表示可控磁悬浮力延迟,主要由数字控制器的采样周期、电流调制延迟以及定转子铁心中存在电涡流等因素引起。

图2 无轴承异步电机动力学模型Fig.2 Dynamic model of bearingless induction motor
3 质量偏心引起的不平衡振动机理分析
如图2 所示,无轴承异步电机转子的运动方程为

式中 m——转子质量;
fm——电磁力;
fw——转子在运动方向上所承受的外力(包括转子自重和负载);
s——某个方向(x 向或y 向)的位移;
is——对应方向的悬浮绕组控制电流。
当转子存在质量偏心时,如图3 所示,转子几何中心为Og,转子质心为Om,转子几何中心处于以定子中心为中心的xy 坐标系下的坐标为(x,y)。存在质量偏心时无轴承异步电机x 方向运动的动力学模型如图4 所示。

图3 无轴承异步电机转子质量不平衡示意图Fig.3 Diagram of mass imbalance of the bearingless induction motor rotor

图4 存在质量偏心时无轴承异步电机转子动力学模型Fig.4 Dynamic model of the bearingless induction motor with mass imbalance
如图3 所示,设转子质心偏离转子几何中心的距离为ε,当电机转子以ωr角速度运转时,由质量偏心引起的不平衡离心力为

式中,ξ为初始状态下转子质心偏离转子几何中心的相角。
在考虑转子存在质量偏心的情况下,转子的运动方程可以写成

式中,fwx和fwy分别为转子所受外力在x、y 方向上的分量,假设控制器中x 和y 方向的PID 调节器参数都是相同的,有

式中,kp,ki,kd分别为PID 调节器参数。
求解式(12)~式(15),可解得

式中


从式(16)可以看出,在转子存在质量不平衡的情况下,无轴承异步电机径向位移控制环仅采用PID 控制时,其转子依然会产生周期性振动。所以,仅通过PID 控制不能消除无轴承异步电机转子的周期性振动。
图5 所示为考虑转子质量不平衡时,仿真实验中获得的转子x 方向位移曲线图。而实际上,由于转子外形存在圆度误差,x 和y 方向上的位移曲线的幅值并不完全相同。

图5 动不平衡引起的转子振动位移波形Fig.5 Displacement waveform of rotor vibration caused by unbalance
从以上分析可以看出,无轴承异步电机悬浮控制中仅采用PID 反馈控制无法消除转子质量偏心产生的周期性振动。为消除无轴承异步电机转子的周期性振动,必须采用动不平衡补偿方法。
4 无轴承异步电机动不平衡补偿方法研究
本文采用的动不平衡补偿方法基于位移最小控制原则。首先,为消除位移中的周期性分量,必须从检测到的位移信号中提取出与转子转动频率同频的周期性信号;其次,对于该周期性同频位移信号,将其变换到转子同步坐标系下,在该同步坐标系下,同频位移信号即转变为直变量;然后,对该直变量进行PID 调制,即可产生在同步坐标系下的补偿控制力分量,再将该补偿控制力分量变换到αβ 静止坐标系下,即可得到αβ 坐标系下动不平衡补偿控制力分量,从而完成对动不平衡量的补偿控制。以下将详细阐述动不平衡补偿方案。
4.1 同步信号获取
为了获取位移检测信号中的同步分量,以往的做法[14,15]都是,将检测的位移信号首先进行从静止坐标系到同步旋转坐标系的旋转变换,然后采用一个低通滤波器来滤除信号中的高频成分,再将信号经过旋转反变换,即可得到检测位移信号中的同步分量。然而这种方法只适用于固定带宽转子高速旋转的情况下,为了使不平衡补偿方法能够在更宽的速度范围内工作,本文采用傅里叶分析技术设计了一种同步信号获取方法,具体流程如图6 所示。

图6 同步信号处理单元(SPU)Fig.6 Synchronous signal processing unit
基于图6,可以得到同步位移信号如下:

式中 s(t)——原始位移信号;
sω(t)——同步位移信号;
ωr——电机转子转速;
T——旋转周期;
a——同步正弦信号幅值;
b——同步余弦信号幅值。
如图 6 所示,首先,检测的位移信号分别与cos(ωrt)和sin(ωrt)相乘,然后进入积分器。在积分器中,除了与转速同频的同步信号外,其他倍频信号及随机信号将被滤除。与转速同频的同步信号经过积分器即变成与原始振动信号幅值成正比的直流信号。再将这个直流信号和与之对应的cos(ωrt)或sin(ωrt)相乘后即可得到传感器检测到的位移信号中的同频成分。
为了实现可靠的同步信号获取,本文所提出方法还需要满足转子转速ωr稳定或缓慢变化的条件。而对于瞬态及转子转速快速变化情况下的同步信号稳定获取还需要进一步研究。对于同步信号获取模块需要用到正余弦计算,本文所述的控制器采用FPGA 作为控制核心,正余弦值的获取采用查表法,从而避免了计算的复杂性。同时由于FPGA 采用并行运算,相对于基于DSP 的悬浮控制系统,计算延时可大大缩小,因而完全能够满足电机高速运转下控制系统的计算性能要求。
4.2 不平衡力补偿方法
定义uv 坐标系为与转子旋转同步的旋转坐标系,则转子的同步位移信号和动不平衡离心力在uv同步旋转坐标系下都是直变量。因此可以在uv 坐标系下对不平衡量进行补偿控制。
不平衡力补偿模块如图7 所示。检测到的位移信号通过同步信号处理单元(SPU)获得与转速同频的位移信号分量,然后将其进行Park 变换,从而转换成同步坐标系下的直变分量su和sv,然后其与同步信号指令值比较,其偏差经过PID 调节器产生同步坐标系下的补偿控制力,然后再将其进行Park-1变换,从而获得在xy 坐标系下的不平衡补偿控制力。

图7 不平衡力补偿模块Fig.7 Unbalance force compensation module
4.3 基于不平衡力补偿的无轴承异步电机控制系统
本文提出的采用动不平衡补偿的无轴承异步电机控制框图如图8 所示。如图所示,无轴承异步电机控制系统由转矩控制子系统和悬浮控制子系统两部分组成。转矩控制子系统主要采用基于转子磁场定向的矢量控制。对于悬浮控制子系统,电涡流传感器检测到的转子径向位置信息一方面传递给径向位移控制环,和位移指令值的偏差经过不完全微分PID 控制器产生径向悬浮力指令值;另一方面传递给不平衡力补偿模块获得不平衡补偿力指令值。悬浮力指令值和不平衡补偿力指令值相加即可得到控制所需的悬浮力指令,由此可得所需的xy 方向控制电流悬浮控制绕组在αβ坐标系下的控制电流分量可由式(4)确定,再经过Clarke 反变换进行调制,从而产生悬浮绕组控制所需的三相参考电流值。

图8 基于不平衡力补偿的无轴承异步电机控制框图Fig.8 Block diagram of a bearingless induction motor system based on unbalance compensation
5 实验研究
本文研究的无轴承异步电机实验样机是在一台型号为Y90L—4 的三相异步电机基础上改造而成,实验平台如图9 所示。如图9 所示,样机前端悬浮,后端采用调心轴承支承,后端盖安装光电编码器以采集电机转速信息。控制器采用Altera 公司生产的EP3C25E144 型号FPGA,两套绕组的逆变器均采用智能功率模块IPM,开关频率为20kHz,控制器与上位PC 通过Ethernet 网络通信。实验样机采用的径向位移传感器为清华大学精仪系桑拓应用技术研究所生产的电涡流传感器,型号为ST—TC—03,量程为0.5mm,灵敏度为10mV/μm。
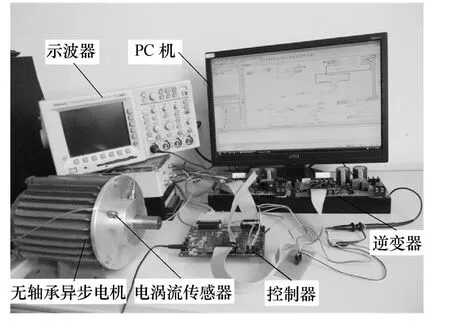
图9 无轴承异步电机实验平台Fig.9 Platform of a bearingless induction motor
本文研究的无轴承异步电机实验样机的主要参数为:额定功率PN=1.5kW,额定转速n=3 000r/min,转子质量m=2.85kg,转动惯量J=0.008 9kg·m2,电机气隙长度 δ0=0.4mm,辅助轴承与转轴的间隙为σ=200μm。两套绕组的参数如下:转矩绕组:定子电阻R1s=2.8Ω,转子电阻Rr=1.75Ω,定子自感Ls=92.73mH,绕组互感 Lm=78.96mH,转子自感 Lr=85.46mH,转子漏感Llr=6.5mH,绕组匝数N1=42,极对数 p1=2;悬浮绕组:极对数 p2=1,绕组匝数N2=21。
图10 所示为电机转速n=1 300r/min 时加入动不平衡补偿前的转子径向位移波形曲线图及频谱图。从图10a 和图10c 中可以看出,转子径向位移呈周期性波动,x 方向和y 方向位移波动的峰峰值大约为40μm。从图10b 和图10d 中可以看出,在与转速同频(21.6Hz)的频率成分处,转子的x 向和y向的位移波动幅值分别为12.18μm 和9.593μm,为位移信号中主要成分。从图中还可以看出,转子的位移信号中除同频分量外还包含高阶倍频分量,如图10b 和图10d 中二倍频(43.2Hz)分量的幅值分别为1.413μm 和1.078μm。这与本文第三节转子动力学的分析有些出入,这是因为,本文中对存在质量偏心的无轴承异步电机转子运动学方程的推导是基于刚性体假设。而实际上,无轴承异步电机的转轴亦是柔性体,且转子外形由于制造工艺会有圆度误差,从而造成外圆表面不严格规整。如此,由不平衡力及其他外力激发的高阶谐波位移分量同样会产生。而激发的高阶谐波的幅值则由柔性转轴自身特性决定。在本文提出的不平衡补偿控制中,转子高阶谐波位移分量未被处理,而转子高阶谐波位移分量的抑制将是本文下一步研究的目标。

图10 加入补偿前转子位移曲线及频谱图(1 300r/min)Fig.10 The waveform and frequency spectrum of rotor displacement without compensation at 1 300r/min
图11 所示为电机转速n=1 300r/min 时,加入动不平衡补偿后的转子径向位移波形曲线图及频谱图。从图11a 和图11c 中可以看出,转子x 方向和y方向径向位移的峰峰值大约为10μm,相比于加入动不平衡补偿前,转子径向位移的峰峰值大大减小,转子的悬浮精度得到很大提高。从图11b 和图11d中可以看出,在与转速同频(21.6Hz)的频率成分处,转子的x 向和y 向的位移波动幅值分别为0.785 5μm 和1.3μm。相对加入动不平衡补偿前,转子x 向和y 向径向位移中与转速同频的周期性同步分量已得到很大抑制。而从图11b 和图11d 中亦可以看出,二倍频分量(43.2Hz)处的位移分量幅值分别为2.107μm 和1.003μm。相对加入动不平衡补偿前,该频率成分处的位移波动未被抑制,这是因为对高频位移分量的抑制研究未被纳入本文的研究范围,将是本文下一步工作的目标。

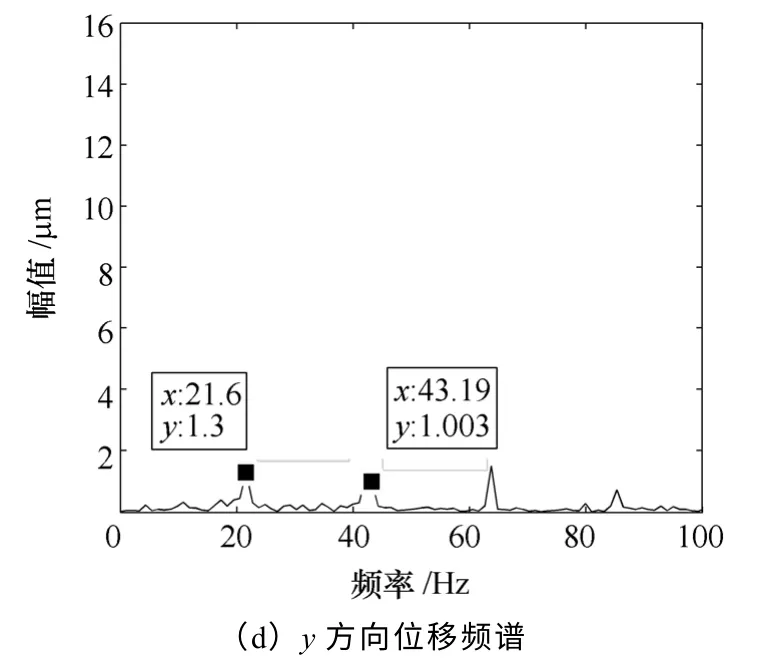
图11 加入补偿后转子位移曲线及频谱图(1 300r/min)Fig.11 The waveform and frequency spectrum of rotor displacement with compensation at 1 300 r/min
为了进一步研究动不平衡补偿控制策略的效果,本文开展了转子转速从1 000~3 000r/min 变化的动态悬浮实验,位移峰峰值的实验结果如图 12所示。从图12 可以看出,在未加入动不平衡补偿时,转子径向位移的峰峰值随转速的增大而非线性增大,转子位移波动依赖于转子旋转速度,可以确信该位移波动主要由转子质量不平衡引起。同时,从图中还可以看出,在加入补偿控制前,转子转速在接近2 600r/min 时位移峰峰值出现一次较快的爬升,并在 2 600r/min 转速位置上出现一个峰值,为107μm,说明无轴承异步电机的一阶临界转速约为2 600r/min。然而,在采用动不平衡补偿后,无轴承异步电机转子振动得到了有效的抑制,整个位移峰峰值曲线接近于一条水平线,并且在一阶临界转速处其位移波动与其他转速的波动没有太大区别。

图12 动不平衡补偿前后的位移峰峰值曲线Fig.12 Rotor peak-peak displacement versus rotational speeds with and without compensation
6 结论
本文研究了无轴承异步电机中由于质量不平衡引起的转子同步振动问题,并提出了一种基于前馈补偿的动不平衡补偿控制方案。通过在无轴承异步电机原有的悬浮控制系统上加上一个前馈控制,利用控制器产生一定的控制力来补偿转子不平衡离心力,强行约束转子围绕其几何中心轴旋转,从而达到转子振动位移最小的目的。文中分析了无轴承异步电机不平衡振动产生的机理,并推导了径向位移环仅采用PID 控制时的转子运动学方程。在此基础上,提出了一种基于前馈闭环补偿的动不平衡补偿方案。搭建了无轴承异步电机实验平台,开展了动不平衡补偿前后的对比实验。实验结果表明,在转子转速为1 300r/min 下,加入不平衡补偿前转子径向位移的峰峰值约为40μm,加入动不平衡补偿控制后转子径向位移减小到约10μm,转子振动减小了约75%,转子悬浮精度大大提高,从而验证了本文所提出动不平衡补偿控制方案的有效性。此外,本文所研究的动不平衡补偿控制方案亦可以推广到其他类型的无轴承电机的悬浮控制中去。
附 录
为了说明文中式(21)同步信号获取过程,作以下补充。
在转子质量存在不平衡时,转子的运动方程可写为

式中,Ak、Bk分别为k 倍频振动信号的正弦分量和余弦分量的幅值;φk和φk为对应分量的相角;sn为随机位移信号。
其中,与转子转速同频分量为

则同步信号处理单元的处理过程可以表示为

从而有

如此,原始信号经过同步信号处理单元后,得到的即为与转速同频的振动信号。
[1]孙晓东,陈龙,杨泽斌,等.考虑偏心及绕组耦合的无轴承永磁同步电机建模[J].电工技术学报,2013,28(3):63-70.Sun Xiaodong,Chen long,Yang Zebin,et al.Modeling of a bearingless permanent magnet synchronous motor considering rotor eccentricity and coupling relationship of windings[J].Transactions of China Electrotechnical Society,2013,28(3):63-70.
[2]孙晓东,朱熀秋.基于神经网络逆系统理论无轴承异步电动机解耦控制[J].电工技术学报,2010,25(1):43-49.Sun Xiaodong,Zhu Huangqiu.Decoupling control of bearingless induction motors based on neural network inverse system method[J].Transactions of China Electrotechnical Society,2010,25(1):43-49.
[3]邓智泉,严仰光.无轴承交流电动机的基本理论和研究现状[J].电工技术学报,2000,15(2):29-35.Deng Zhiquan,Yan Yangguang.The main theory and status quo of AC bearingless motors[J].Transactions of China Electrotechnical Society,2000,15(2):29-35.
[4]王凤翔,郑柒拾,王宝国.不同转子结构无轴承电动机的磁悬浮力分析与计算[J].电工技术学报,2000,15(5):6-9.Wang Fengxiang,Zheng Qishi,Wang Baoguo.Analysis and calculation of magnetic levitation forces for bearingless motors with different rotor structure[J].Transactions of China Electrotechnical Society,2000,15(5):6-9.
[5]Shi J,Zmood R,Qin L.Synchronous disturbance attenuation in magnetic bearing systems using adaptive compensation signals[J].Control Engineering Practice,2004,12(3):283-290.
[6]Bi C,Wu D Z,Jiang Q,et al.Optimize control current in magnetic bearings using automatic learning control[C].Proceedings of IEEE International Conference on Mechatronics,Istanbul,Turkey,2004:305-310.
[7]Kuseyri I S.Robust control and unbalance compensation of rotor/active magnetic bearing systems[J].Journal of Vibration and Control,2012,18(6):817-832.
[8]Li L,Shinshi T,Iijima C,et al.Compensation of rotor imbalance for precision rotation of a planar magnetic bearing rotor[J].Precision Engineering,2003,27(2):140-150.
[9]Lum K Y,Coppola V T,Bernstein D S.Adaptive autocentering control for an active magnetic bearing supporting a rotor with unknown mass imbalance[J].IEEE Transactions on Control System Technology,1996,4(5):587-597.
[10]Tang L,Chen Y Q.Model development and adaptive imbalance vibration control of magnetic suspended system[J].Acta Astronautica,2009,65(9-10):1506-1514.
[11]Hector G C,Pablo S M.Unbalance compensation for active magnetic bearings using ILC[C].Proceedings of the IEEE International Conference on Control Applications,Mexico,2001:58-63.
[12]Herzog R,Buhler P,Gahler C,et al.Unbalance compensation using generalized notch filters in the multivariable feedback of magnetic bearings[J].IEEE Transactions on Control System Technology,1996,4(5):580-586.
[13]Setiewan J D,Mukherjee R,Maslen E H.Synchronous sensor runout and unbalance compensation in active magnetic bearings using bias current excitation[J].Journal of Dynamic Systems,Measurement and Control,2002,124(1):14-24.
[14]张涛,倪伟,叶小婷.基于电流最小的无轴承永磁电机转子质量不平衡补偿控制[C].Proceedings of the 27th Chinese Control Conference,Kunming,China,2008:164-168.
[15]张涛,朱熀秋.无轴承永磁同步电机转子质量不平衡补偿控制[J].中国电机工程学报,2007,27(15):33-37.Zhang Tao,Zhu Huangqiu.Rotor’s mass unbalance compensation control in bearingless permanent magnettype synchronous motors[J].Proceedings of the CSEE,2007,27(15):33-37.
[16]张倩影,邓智泉,杨艳.无轴承开关磁阻电机转子质量偏心补偿控制[J].中国电机工程学报,2011,31(21):128-134.Zhang Qianying,Deng Zhiquan,Yang Yan.Compensation control of rotor mass eccentric in bearingless switched reluctance motors[J].Proceedings of the CSEE,2011,31(21):128-134.
[17]卜文绍.无轴承电机通用磁悬浮模型及解耦控制系统研究[D].武汉:华中科技大学,2007.
[18]Chiba A,Fukao T,Ichikawa O,et al.Magnetic bearings and bearingless drives[M].Boston:Newnes Elsevier,2005.
[19]Nornura S,Chiba A,Nakamura F,et al.A radial position control of induction type bearingless motor considering phase delay caused by the rotor squirrel cage[C].Power Conversion Conference,Yokohama,Japan,1993:438-443.
[20]Bu W S,Xiao J Y,Yuan L,et al.Induction compensation control of bearingless induction motor[C].Proceedings of the IEEE International Conference on Mechatronics and Automation,Beijing,China,2011:944-949.
