三维激光扫描在矿区地面沉陷变形监测中的应用
2014-11-21李强,邓辉,周毅
李 强,邓 辉,周 毅
(成都理工大学地质灾害防治与地质环境保护国家重点实验室,四川成都 610059)
0 引言
三维激光扫描技术是继GPS技术之后的一门高新测绘技术。目前,该技术主要用于工程测量、地形测量、高陡边坡岩体特征量测、虚拟现实和模拟可视化、矿区土方开挖断面和体积测量、工业制造、加工检测、施工量测、事故调查、历史古迹调查与恢复,以及特殊动画效果测量等方面[1-3]。
三维激光扫描技术又称“实景复制技术”,能够快速获取完整的原始测绘数据并高精度地重建扫描实物[4]。近年来,该技术应用于变形监测已成为不少学者研究的热点,并且已经在该领域取得了一定的研究成果,如2005年罗德安等分析了三维激光扫描技术在变形监测领域内应用的可行性、技术优势和存在的问题,认为基于三维激光扫描技术的整体形变监测是可行的[5];2006年李秋等对矿区地表沉陷监测数据获取精度进行了分析,并结合矿区地表沉陷监测技术优势与存在问题进行了讨论[6];2010年徐进军、王海城等将三维激光扫描技术引入到滑坡变形监测与分析中,并进行了相应的理论分析与实际测量[7];2011年丁延辉等提出了一种应用三维激光扫描技术研究建筑物变形的方法,该方法可以对建筑物进行平面位移监测、沉降监测、倾斜分析、整体形变监测[8];2012年陈致富、陈德立等对三维激光技术在基坑变形监测中的应用进行了初步研究,讨论并分析了三维激光扫描系统在基坑监测中的技术优势和存在的问题[9]。
三维激光扫描技术应用于不同工程领域的变形监测研究表明:该技术用于变形监测具有可行性,其与常规变形监测手段性相比,突破了传统的单点测量方法,具有数据采集效率高、数据获取速度快、数据分辨率高、测量精度高、无接触测量等优点[10];另外,由于采样点多(最多可获取10亿),从而不仅能够表进行单点变形监测分析,也可进行线(剖面)和整体变形分析。
1 三维激光扫描原理及其适用性
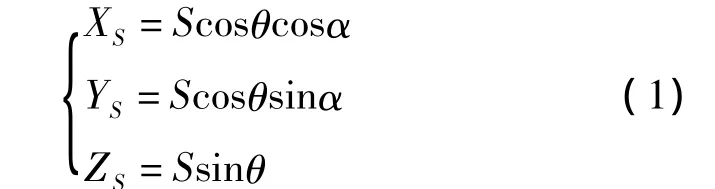
根据三维激光扫描仪测距方式的不同,工作原理也不尽相同。目前,大多数三维激光扫描仪所采用的工作方式是脉冲激光测距的方法,采用无接触式高速激光测量,以点云形式获取扫描物体表面阵列式几何图形的三维数据,如 HDS2500,ScanStation2,RIEGL VZ-400,RIEGL VZ-1000,ILRIS-3D,HDS8800,GLS-1500,I-site8800等。此种工作原理的三维激光扫描仪主要采用TOF脉冲测距法(Time of Flight),是一种高速激光测时、测距技术。其获取扫描目标点云坐标原理为:根据内部精密的测量系统获取发射出去的激光光束的水平方向角度α和垂直方向角度θ;由脉冲激光发射到反射被接收的时间计算得到扫描点到仪器的距离值S;从获取扫描反射接收的激光强度,对扫描点进行颜色灰度的匹配。这样就能够获取扫描对象表面每个采样点的三维坐标(公式1),从而得到扫描对象的点云数据。
三维激光扫描系统最大的优点之一即是测量精度高,当前的扫描仪单点定位精度已达毫米级,形成模型表面精度±2mm,徕卡HDS6200甚至可达1mm(25m范围内);而变形监测的最大特点是精度要求高,三维激光扫描技术用于变形监测则恰好能突显其精度高的优点。该技术用于矿区开采引起的地面沉降变形监测,不仅能满足变形监测的高精度要求,而且能够快速的获取整个变形监测区的相对空间位置及垂直位置变化,以确定监测区地表沉降变形情况。由此获得的沉降变形结果能更全面、直观地反映地表整体沉降变形特征情况。
本次矿区地面沉降变形监测选择瑞士徕卡公司生产的ScanStation2三维激光扫描仪获取三维点云数据。ScanStation2三维激光扫描仪具有全方位视角、高精度双轴(倾斜)补偿器、测量级的点位精度等特点[11]。其测距距离1.8~300m(为了保证测量精度,一般控制测距距离为2~50m),单点扫描精度为±4mm,标靶获取精度±1.5mm,形成模型表面精度为±2mm,扫描速度50000点/s。
2 研究区概况
研究区位于重庆市万盛某采煤矿区沉陷变形区内,距重庆市105km,交通便利。该区地处四川盆地与贵州高原接壤地带,山脉走向NNE,大致与地层走向一致,总的地势东高西低。区内地层岩性主要为第四系灰色泥岩碎块及粉砂质粘土,三叠系下统嘉陵江组(Tj1)灰色薄~中厚层状灰岩、灰色泥质灰岩,飞仙关组(T1f)灰绿色灰质泥岩。构造上位于南桐复式背斜之次一级褶皱乌龟山背斜东翼,构造轴向由NNE转NNW,形成宽缓向斜和紧密背斜形态的隔挡式褶皱。断裂构造主要产于紧密背斜轴部,多以走向断裂为主。
该煤矿于1959年投入生产,已经具有50余年开采历史,矿区煤层平均埋藏深度640~690m,目前仍在继续开采。矿区的长期开采形成了采空区,采空区面积5.82km2,受采动影响范围面积28.46km2。采空区的局部塌陷引起了采空区及采动影响范围内地表不同程度的沉降变形。在采空区影响范围以内,地表建筑物、地面出现了明显的沉陷、拉裂变形现象。随着矿区的继续开采,沉降变形迹象正在进一步加剧。因此,为了矿区继续安全开采,对沉陷变形区进行沉降变形监测已刻不容缓。
本文选取采煤矿区采动影响范围内地表变形明显、沉陷趋势显著的某厂区建筑物、地表作为研究对象,通过对其两个时期(2011.3、2012.5)三维点云数据的采集、处理、变形量值提取及沉陷变形趋势分析,为研究整个采煤矿区及采动影响区的沉降变形规律、矿区开采危险性评价及矿区恢复治理提供了重要参考依据。
3 监测数据采集与预处理
研究区进行地表沉降变形监测的基本工作流程分为监测方案布置、点云数据采集、点云数据预处理、点云数据后处理、变形结果对比分析。

图1 地面沉降变形监测工作流程Fig.1 The process of monitoring surface deformation
3.1 监测方案布置
监测方案布置分为测站、控制标靶以及基准点设置。
(1)测站设置
测站设置即扫描获取整个研究区点云数据所需设置的测站数量和扫描仪的安放位置。布置原则:在确定要扫描的目标对象以及被扫描对象周围环境后,针对扫描对象的位置、大小、形态及所需获取的重点属性后,确定测站位置和站数;为了后续数据处理时保证数据拼接精度,测站数≤3站为宜。本研究中根据研究区情况结合扫描仪的测距距离共设置两个测站(图2)。
(2)控制标靶设置
控制标靶即用于不同测站所获取点云数据拼接的基准点。布置原则:必须布置于两相邻测站扫描仪都能识别标靶中心(直径2mm的特殊材质的激光反射点)的位置;同一区域布置的控制标靶数量至少≥3个(一般情况下布置4~5个标靶);标靶位置不能处于同一条直线上。本研究在监测区共设置4个控制标靶(图3)。
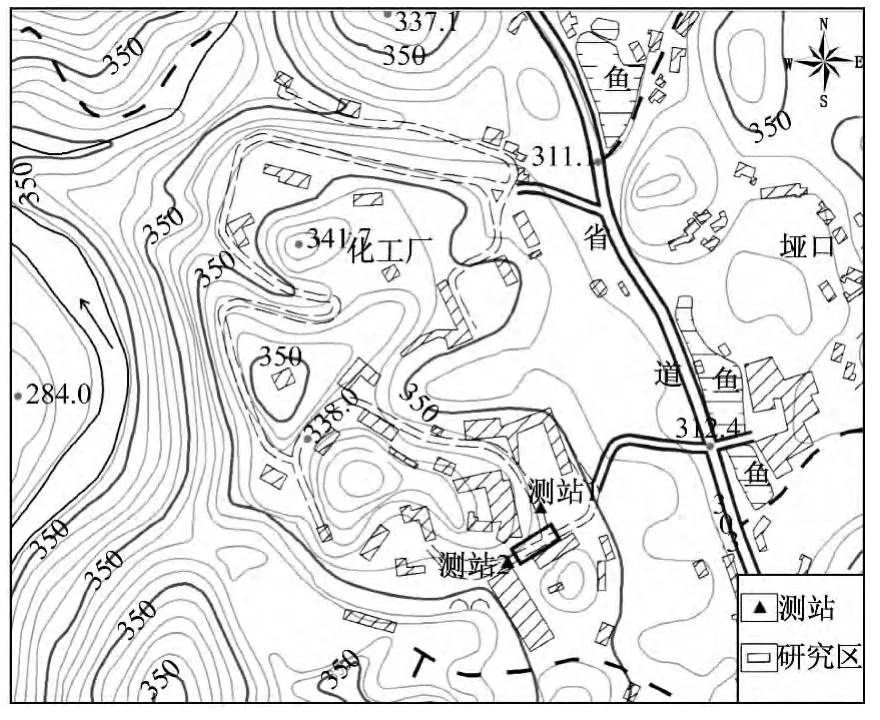
图2 研究区测站布置Fig.2 Station layout of the study area

图3 研究区控制标靶布置Fig.3 Control target layout of the study area
(3)控制点设置
控制点用于对不同期次点云数据坐标进行配准。控制点的布置必须作严格要求,因为控制点的稳定性和可靠性将直接影响变形监测结果的可靠性和精度。布置原则:控制点需布置于无变形区域,控制点的个数≥3(一般布置4个,其中一个作为备用);在监测周期内控制点的必须具有足够的稳定性而不会被人为或者自然破坏;控制点位置不能处于同一直线上。一般情况下,监测对象所在区域或多或少都存在一定的变形,控制点要布置于绝对的无变形区域无法满足,此种情况下,监测点需布置于区域变形量相对较小的位置,并假定控制点是相对不变形,因而获得的变形结果是该区域的相对变形结果。由于本文中研究区整体变形迹象明显,不存在绝对无变形区,因此,研究中假定设置的控制点位置为相对不变形的,最终得到的监测结果为相对沉降变形量。
3.2 点云数据采集
在布置好监测方案之后,首先在选定的测站上架设扫描仪,调整好仪器姿态,然后将扫描仪与笔记本进行相连接,并在Cyclone软件中设置好扫描参数(行、列数和扫描的分辨率等),此时便可对待测对象进行三维激光扫描,扫描仪会按照软件环境中设置的参数自动进行场景扫描。对待测目标进行三维激光扫描的同时,为了后续数据处理(点云数据拼接、坐标配准),需对待测目标关键部位(待测目标的结构部位、控制标靶和控制点)进行细部扫描,最终获取完整的目标物体三维点云图像。
3.3 点云去噪处理
由于三维激光扫描仪所获取的点云图像中采集到了植被、电线等与变形监测无关的信息,因此在进行三维数据后处理之前需要对三维数据进行去噪处理,对这些无关的点云数据应尽量删除,减小其干扰,从而提高数据质量。
3.4 点云数据拼接
由于研究区点云数据是通过设置两站获取的分幅数据,因而要得到研究区的完整点云数据,需要将两站点云数据进行拼接。不同测站点云数据的拼接是基于控制标靶完成,拼接误差一般要求控制在在0~3mm,否则不能满足变形监测的精度要求。本研究中利用设置的4个控制标靶对两个测站所获取的点云数据进行数据拼接,拼接误差为1mm,完全满足精度要求。
3.5 两期数据坐标配准
经过拼接后的两期三维点云数据是基于不同扫描仪位置为参考点获取的,因而具有各自独立的坐标系,为了对两期数据进行对比分析,需要将两期数据进行坐标配准,以获得统一的坐标系。具体实现方法:以第一期的三维点云数据为基准坐标系统,依据获取的第一期三维扫描数据中的4个控制点坐标值为基准,在Cyclone软件中利用第一期监测点坐标对第二期三维扫描数据进行坐标匹配。经过对两期三维数据进行坐标配准,配准结果的匹配误差为2 mm,在允许的误差范围之内(一般坐标匹配精度要求在0~4mm),满足精度要求。
4 监测数据后处理及结果分析
本研究利用不同时期三维激光扫描点云数据进行沉降变形监测的基本思想:假设地面、墙体、建筑物等是不变形的(没有位移变化),对两期三维数据进行对比分析比较,若两期三维点云数据坐标基本无变化,则说明监测区没有发生变形;若三维点云坐标发生变化,则说明监测区发生了变形,具体的变形特征需要提取两期三维点云数据变形结果进行对比分析。
本文在对两期三维点云数据预处理的基础上,通过三维数据后处理操作分别提取了研究区两个期次的点坐标变化特征、剖面线变化特征及整体变形特征,并从点、线、面三个角度对研究区沉降变形特征进行了对比分析。
4.1 单点变形提取分析
研究中应用Cyclone软件提取两期三维点云数据特征点坐标值,利用两期点云数据坐标值差值计算特征点的变形量值。特征点选取需遵守以下原则:监测区的树木、盆景等可能人为移动的物体不能作为特征点选取,应当选取监测区墙体、建筑物、边坡等的典型拐点、交叉点等作为特征点(图4)。本次研究中选取研究区变形特征明显的墙体作为特征点提取对象,通过提取两期墙体特征点坐标值,获得了研究区的典型特征点变形结果如表1所示。
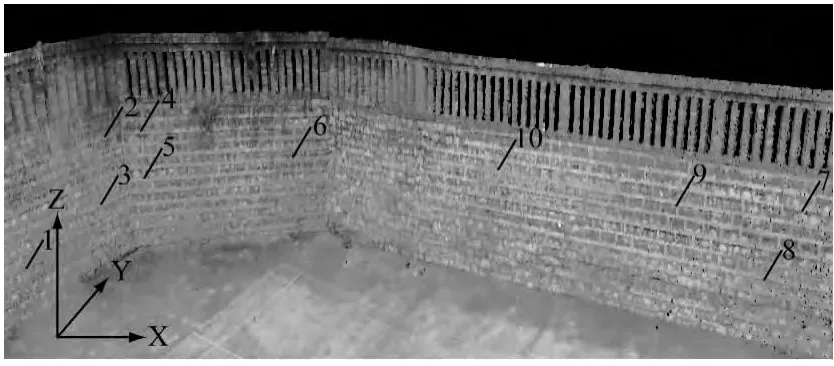
图4 点特征提取分布位置Fig.4 Distribution of point feature extraction
通过对提取的研究区两个时期特征点坐标值对比分析可知:研究区墙体变形位移主要表现于X轴方向上,最大变形位移达32mm,其次是Y方向上最大18mm及Z方向上最大14mm;特征点位移变形表现为不均匀变形。
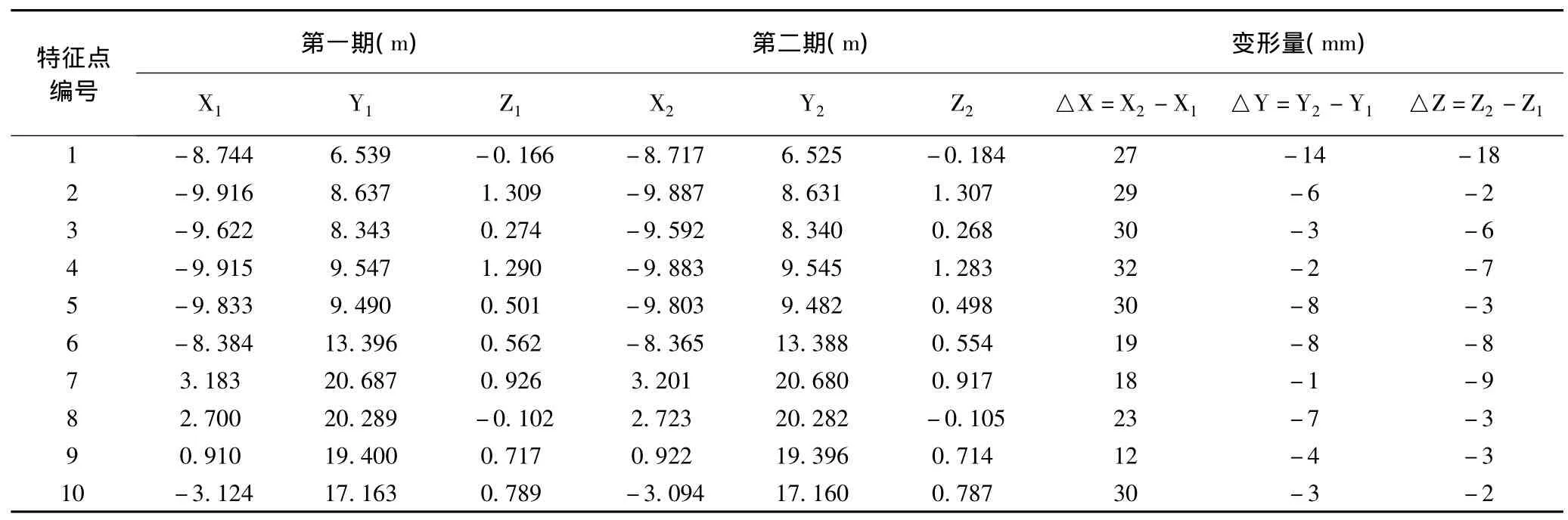
表1 特征点坐标位移差值Table 1 Characteristic point coordinate displacement difference
4.2 线沉降变形提取分析
单一的点特征变形仅能反映出研究区的离散变形特征,而不能反映出连续的线性变形特征。通过提取研究区Z轴方向剖面线可直观反映出地面沉降线性变形特征。本研究利用后处理软件提取的剖面线沉降特征结果如图5、图6。
对提取的研究区两个时期剖面线沉降变形位移(图6)进行对比分析可知:研究区发生明显的沉降变形,最大沉降量15.7mm,最小沉降量2.8mm,表现为不均匀沉降变形,呈整体下沉的发展趋势。
4.3 整体变形特征提取分析
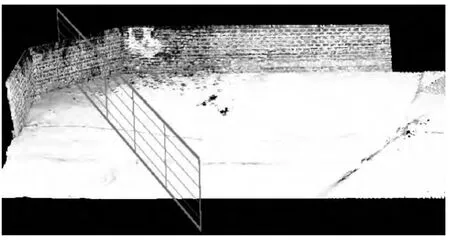
图5 剖面线位置Fig.5 Section line position
以上获取的研究区点、线沉降变形仅仅是离散的点位移或局部线性变形特征,却不能充分反应监测区的整体变形情况。三维激光扫描技术用于变形监测的最大特点是对被扫描目标做全方位、整体的数据采集,这样便可对待测物体进行整体变形监测。

图6 剖面线沉降变形位移Fig.6 Section line displacement
本研究利用后处理软件对研究区两期三维点云数据分别建立表面模型(精度2mm),形成一幅基于两期监测对象相同部位点云距离差值的整体沉降变形假彩色平面模型(图7),该模型能够清楚地反映出研究区整体沉降变形趋势及位移大小。根据研究区整体变形假彩色结果可知:研究区整体表现为不均匀沉降变形,沉降变形位移值主要分布于5~15mm区间,局部存在抬升现象,与现场实际情况基本相吻合。

图7 整体变形假彩色结果Fig.7 The false color results of integral deformation
4.4 监测结果精度分析
本研究中三维激光扫描仪进行数据采集时扫描精度为4mm,点云数据拼接精度为1mm,两期点云数据坐标配准精度为2mm,累计误差精度为7mm<10mm,满足精度要求。矿区沉降变形监测的精度要求一般在10mm以内被认为满足精度要求[12]。
5 结论
本文采用三维激光扫描系统采集研究区两期(2011.03、2012.5)三维点云数据,通过对三维数据进行一系列处理,得出了监测区单点沉降变形、地表剖面线变形以及地表整体变形结果。经过对监测结果的对比分析得出:(1)研究区呈整体变形趋势,地面沉降为不均匀沉降,与现场实际沉降变形情况基本相吻合;(2)由于监测区是整体变形,因而获得的沉降变形结果是相对变形位移,最大沉降量15.7mm,最小沉降量2.8mm;(3)应用三维激光扫描技术进行地面沉陷矿区地表变形监测,能够获得点、线、面变形监测结果,与传统单点变形监测相比,弥补了其缺乏线性变形及整体变形特征的不足;(4)该技术应用于地面沉陷矿区的地表变形监测具有一定可行性和实际应用价值。
目前三维激光扫描技术已被广泛应用于各监测领域,如大坝变形监测、滑坡监测、建筑物变形监测、基坑变形监测、桥梁变形监测等方面,并取得了一定的研究成果,但由于该技术的测量方式及数据处理都完全不同于传统测量手段,其具体应用于矿区地面沉降变形监测时尚存在理论问题和实际问题有待解决,仍需要进一步研究完善。
[1]刘旭春,丁延辉.三维激光扫描技术在古建筑保护中的应用[J].测绘工程,2006,15(1):48-49.LIU Xuchun,DING Yanhui.Discussing the application of 3D laserscan technologyin old architecture[J].Engineering of Surveying and Mapping,2006,15(1):48-49.
[2]张远智,胡广洋,刘玉彤,等.基于工程应用的三维激光扫描系统[J].测绘通报,2002(1):34-36.ZHANG Yuanzhi,HU Guangyang,LIU Yutong,et al.Application of 3D laser scanning system in engineering project-tion[J].Bulletin of Surveying and Mapping,2002(1):34-36.
[3]刘宏,董秀军,向喜琼,等.用三维激光成像技术调查高陡边坡岩体结构[J].中国地质灾害与防治学报,2006,17(4):38-41.LIU Hong, DONG Xiujun, XIANG Xiqiong,et al.Investigation of rock mass discontinuity by 3D laser imaging technique on a large and stiff slope[J].The Chinese Journal of Geological Hazard and Control,2006,17(4):38-41.
[4]孙瑜,严明,覃秀玲.HDS4500三维激光扫描仪的地质工程应用[J].河北工程大学学报(自然科学版),2008,25(4):86-88.SUN Yu,YAN Ming,QIN Xiuling.Study on geological engineering application of Leica HDS4500 threedimensional laser scanner[J].Joumal of Hebei University of Enginee-ring(Natural Science Edition),2008,25(4):86-88.
[5]罗德安,朱光,陆立,等.基于3维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.LUO Dean,ZHU Guang,LU Li,et al.Whole object deformation monitoring based on 3D laserscanning technology[J].Bulletin of Surveying and Mapping,2005(7):40-42.
[6]李秋,秦永智,李宏英,等.激光三维扫描技术在矿区地表沉陷监测中的应用研究[J].煤炭工程,2006(4):97-99.LI Qiu,QIN Yongzhi,LI Hongying,et al.Research and application of laser 3D scan technology to monitoring and measurement of mine ground subsidence[J].Coal Engineering,2006(4):97-99.
[7]徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(7):2187-2191.XU Jinjun,WANG Haicheng, LUO Yuzhen,et al.Deformation monitoring and data processing of landslide based on 3D laserscanning[J].Rock and Soil Mechanics,2010,31(7):2187-2191.
[8]丁延辉,汤羽扬,周克勤,等.基于地面三维激光技术的建筑物变形监测研究[J].北京测绘,2011,(2):4-6.DING Yanhui,TANG Yuyang, ZHOU Keqin,et al.Research on deformation monitoring of buildings based on terrestrial 3D laser scanning technology[J].Beijing Surveying and Mapping,2011(2):4-6.
[9]陈致富,陈德立,杨建学,等.三维激光扫描技术在基坑变形监测中的应用[J].岩土工程学报,2012,34(S):557-559.CHEN Zhifu, CHEN Deli, YANG Jianxue,etal.Application of three-dimensional laser scanning technique in deformation monitoring of excavations[J].Chinese Journal of Geotechnical Engineering,2012,34(S):557-559.
[10]董秀军.三维激光扫描技术获取高精度DTM的应用研究[J].工程地质学报,2007,15(3):428-432.DONG Xiujun.Research on application of 3D laser scanning technology in acquiring DTM with high accuracy and resolution[J].Journal of Engineering Geology,2007,15(3):428-432.
[11]董秀军,戚万权.徕卡ScanStation2激光扫描仪在水电工程地质编录中的应用[J].测绘通报,2011(6):84-85.DONG Xiujun,QI Wanquan.Application of the Leica ScanStation2 laser scanners in hydropower engineering geologic logging[J].Bulletin of Surveying and Mapping,2011(6):84-85.
[12]张舒,吴侃.第七届全国矿山测量学术会议论文集[C].北京:中国煤炭协会,2007.ZHANG Shu,WU Kan.The 7th national mine survey academic conference proceedings[C].Beijing:China Coal Society,2007.