基于实测数据的舰船目标前视成像方法研究*
2014-11-09闫海鹏
闫海鹏, 于 勇, 张 彬
(北京遥测技术研究所 北京 100076)
引 言
由于雷达成像技术具有全天候、全天时、远距离等其它光学成像技术不具备的优点,因而广泛应用于民用和军事领域,如地形测绘、海洋观测、目标识别与精确制导等[1]。目前,雷达获取观测区域二维高分辨图像主要通过合成孔径雷达(SAR)技术,其方位向高分辨依靠的是雷达与目标之间相对运动引起的多普勒频率展宽。但当目标区域位于雷达飞行路线正前方时,即雷达工作在前视成像模式,此时目标区域回波的多普勒带宽很窄,且飞行路线两侧对称区域的多普勒信息相同,会形成前视成像盲区[2],导致传统的SAR技术无法解决前视高分辨成像问题。
近年来,国内外学者针对上述问题提出了多种实现雷达前视高分辨成像的方法,如双基地SAR[3]、前视SAR[4]以及单脉冲成像技术[5,6]等。其中,前两种成像方法由于同步问题和对天线尺寸的要求,系统实现较为复杂;单脉冲成像利用一次回波的和、差通道信息来定位目标主要散射点的角度,结合距离向脉冲压缩处理实现二维成像,可以明显改善实波束前视成像的质量,并且运算量小,有利于工程实现。文献[2]给出了单脉冲成像的算法流程,并对载机前下方地面场景的实测回波数据进行了单脉冲成像,文献[7]从单脉冲和差比的概率密度出发,对单脉冲成像的性能进行了分析。
对于舰船等动目标,由于目标的非合作性以及船体自身的摇摆,使得距离徙动的形式更加复杂。此外,距离对准只是对回波的实包络进行了对齐,各次回波复包络中的相位是不同的,如不对其进行校正则会影响单脉冲测角的精度,导致图像散焦。本文首先介绍了单脉冲成像算法的基本流程,然后提出一种适用于运动目标的单脉冲前视成像算法,该方法利用恒虚警检测技术与平均包络最小熵法对目标回波的包络进行对齐,再对各次回波的初相进行校正,最后进行单脉冲成像。本文重点通过对舰船目标的实测回波数据的处理,研究单脉冲前视成像算法对舰船目标的成像能力,并对成像结果进行分析。
1 单脉冲前视成像原理
1.1 单脉冲测角技术主要原理
单脉冲技术利用两个相互交叠的天线波束接收回波信号,通过对脉冲回波的一次和差处理,就可以确定目标的方位信息。根据从回波信号中提取目标角度信息的具体方式,可以将单脉冲技术分为比幅单脉冲与比相单脉冲,比幅单脉冲测角法如图1(a)所示,该方法通过比较两波束收到的信号强度来判断目标偏离等信号轴的方向,并估计出目标偏离等信号轴的大小。比相单脉冲测角法如图1(b)所示,信号由天线孔径中心发射,并由两个与孔径中心间隔为d的子孔径接收,通过比较两个接收信号的相位,估计出目标的实际位置。

图1 单脉冲测角技术示意图
本文采用的是比幅-和差单脉冲测角方法。假设两交叠波束的天线方向图函数相同且设为F(θ),和、差波束的天线方向图函数分别为 FΣ(θ)、FΔ(θ),如图 2 所示。根据差波束在等信号轴线(假设为0°)周围近似线性的特点,将差方向图函数FΔ(θ)在0°进行泰勒级数展开并保留一阶项,得到

和方向图函数FΣ(θ)在0°附近可以近似表示为FΣ(θ)≈FΣ(0)=A。其中,K为差波束天线方向图在0°的斜率,A为和波束天线增益。令在天线波束指向附近且与波束中心夹角为θ的点目标的和、差通道回波信号为sΣ(t)和sΔ(t),以和通道信号为参考,对差通道信号进行归一化处理,得到点目标的角度估计


图2 和差方向图
考虑到复信号及各种噪声信号,应对θ取实部,即

1.2 单脉冲前视成像算法
单脉冲前视成像算法主要利用脉冲压缩技术获取距离向高分辨,在方位向利用单脉冲测角技术获取等效散射点的精确位置,从而得到目标的二维图像。图3(a)为雷达天线扫描示意图,各点目标固定不动,雷达平台以速度v向目标区域运动,在运动过程中天线匀速扫过目标所在区域。图3(b)为实孔径成像示意图,由于天线方向图的调制作用以及雷达与目标间的相对运动,点目标被扩散为一条“斜直线”。在单脉冲成像之前,需要将“斜线”扳直。由于距离徙动量近似为直线,因此距离徙动校正可以在距离频域进行,只需在频率域乘以与补偿距离有关的线性频率相位因子ej4πvcosθcfrtm即可。其中,θ为目标进入波束时雷达视线与航向的夹角,fr为距离频率,tm为慢时间,c为光速。距离徙动校正之后的图像如图3(c)中的直线所示,然后利用单脉冲测角技术对同一距离单元内的回波进行重定位,聚集出如图3(c)中“圆点”所示的目标各散射中心。

图3 单脉冲成像示意图
2 目标运动补偿算法
2.1 包络对齐的平均包络最小熵法
对舰船目标来说,由于海情的多变以及舰船本身运动的复杂性,使得目标各次回波会落在不同的距离单元内,发生越距离单元徙动,这时距离函数已不再表现为图3(b)中的“斜直线”,徙动校正无法在距离频域一次完成。这种情况下的徙动校正可采用平均包络最小熵距离对准法[8,9]进行对齐,该方法利用全部回波包络信息,以距离向包络和的熵作为目标函数,通过对各次回波的包络偏移量求偏导,得到需要补偿的距离偏移量。
假设sr(r,n)为回波经距离向脉压之后的幅度值,其中r为距离向采样,n为回波序号(0≤n≤N-1),N为脉冲总数。那么平均距离像可定义为

其中Δr(n)为第n个回波包络的偏移量,第二个等号是利用傅里叶变换的时移性质得出,Sr(fr,n)为sr(r,n)的傅里叶变换。包络对齐后平均距离像的锐化度最大,我们可以用平均距离像的熵来表示这一锐化程度

通过求解一组E关于Δr(n)的偏导方程

得到使得熵最小的一组偏移矢量Δr,最后对各回波包络进行平移校正。将式(4)和式(5)代入式(6)得到


图4 采用平均包络最小熵法进行距离对准
2.2 相位校正
距离对准之后,第r个距离单元和、差通道回波可以写为

其中,n为回波序号,Lr为第r个距离单元中散射点的个数,σi和φin分别为第i个散射点的幅度和各次回波的多普勒相位,FΣ(Δ)(θin)为第 i个散射点在第 n 次照射时的和、差方向图函数,ξn,Σ(Δ)为和、差通道各次回波的初相值,在非相干的情况下,这两个值是随机的。假设第r个距离单元内只有一个散射点,将式(8)代入式(3)化简后可以得到该散射点的方位信息

其中,θ(n)为第n次测得的角度值,Δξn= ξn,Δ-ξn,Σ为和、差通道的初相差。可见,一次扫描过程中,不同的Δξn会使得θ(n)落在不同的方位单元,造成的后果是该点的图像灰度值散布在不同的方位单元,使得聚焦效果变差,所以需要对这一随机相位差进行校正。
由式(9)可以看出,对于单点目标而言,单脉冲测角消除了点目标运动过程中的多普勒信息,Δξn可以通过下面的公式求得

最后,用该孤立散射点求得的一组Δξn(0≤n≤N-1)来对各次回波的初相进行补偿。实际中,一个距离单元内只存在一个单散射点的情况几乎不存在,但存在一个特强的散射点和多个小散射点的情况还是比较常见的,可以利用这些特显点的回波数据来对整个回波数据进行相位校正。特显点的选取可以使用文献[10]给出的方法。
引入运动补偿与恒虚警检测技术的单脉冲前视成像流程如图5所示。

图5 舰船目标单脉冲前视成像算法流程
3 舰船目标实测数据处理
舰船目标的实测数据来源于某X波段雷达对海面进行的扫描探测,雷达系统的部分参数如表1所示。

表1 舰船目标成像参数
此时采用的天线和方向图3dB宽度约为3.17°,差方向图0点斜率为14.6/度(834/rad),天线以角速度ω =12.5°/s对海面进行扫描探测。雷达发射宽带线性调频信号,带宽200MHz。
图6(a)为和、差通道图像以及只进行了距离对准的单脉冲成像结果。由于宽带信号能够分辨出多个等效散射中心,因此可以利用的等效散射点数目较多。这里和、差通道数据是依据惯导返回的方位角信息提取的,两组相邻回波间的角度间隔为30倍的扫描间隔。为了利用更多的扫描信息,对惯导返回的方位角进行插值处理,近似得到实际每次回波时所对应的方位角。由于23km处舰船目标(假设船长100m)所对应的张角大约为0.2°,取和通道数据中幅值最大处周围的若干单元进行成像处理,转换到x-y坐标下,如图6(b)所示。目标在距离向上得到很好的分辨,在方位向上横跨约600m,能从极坐标图像看出方位向分辨率较和通道图像有所改善。由于未经相位校正,舰船目标上的主要散射点聚焦效果较差,在方位向上有明显的展宽。

图6 宽带数据单脉冲成像
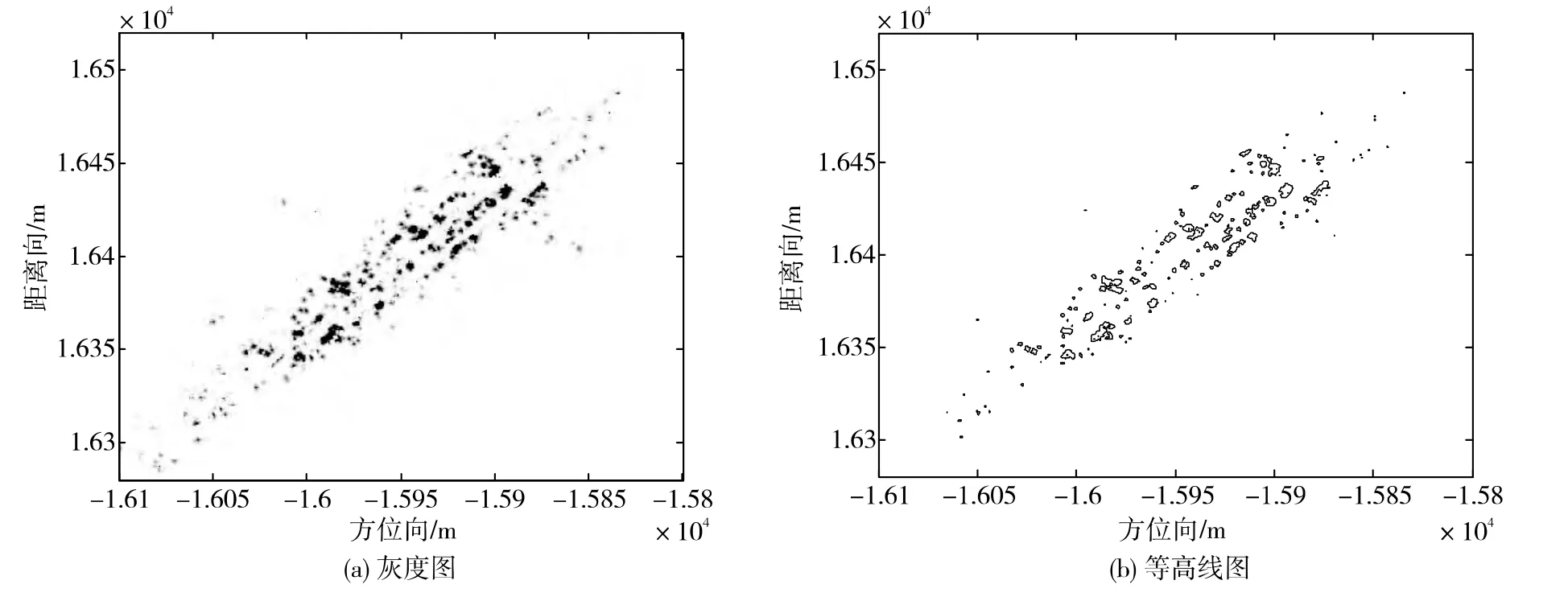
图7 相位校正后的成像结果
对于一个较大的舰船目标,在恒虚警检测、平均包络最小熵距离对准以及相位校正之后进行单脉冲前视成像,处理实测数据得到的舰船图像具有多个强散射中心。在发射宽带信号条件下,这些强散射中心分布在多个距离分辨单元内,这些散射点代表了目标在不同角度处的能量重心,利用这些能量重心进行单脉冲跟踪,可提高对目标的测角精度,同时具有抗角闪烁能力。
4 结束语
本文结合单脉冲成像算法、运动补偿和恒虚警检测技术,提出一种适用于舰船等稀疏点目标的单脉冲前视成像方法,该方法首先对目标回波进行恒虚警处理确定目标所在的距离单元,然后对各次回波进行包络对齐,再对各次回波的初相进行校正,最后进行单脉冲扫描成像。该方法优于传统实孔径前视成像方法,能够提高对舰船目标的跟踪识别能力,具有广阔的应用前景。
[1]保 铮,邢孟道,王 彤.雷达成像技术[M].北京:电子工业出版社,2005.
[2]吴 迪,朱岱寅,朱兆达.机载雷达单脉冲前视成像算法[J].中国图像图形学报,2010,15(3):462~468.
[3]Walterscheid Ingo,Espeter Thomas,Klare Jens,et al.Potential and Limitations of Forward-Looking Bistatic SAR[J].IEEE International Geoscience and Remote Sensing Symposium(IGARSS),2010:216~219.
[4]Sutor T,Witte F,Moreira A.A New Sector Imaging Radar for Enhanced Vision-SIREV.Enhanced and Synthetic Vision 1999[J].Proceedings of SPIE,1999,vol 3691:39 ~47.
[5]刘 峥,张守宏.毫米波单脉冲雷达目标二维结构成像方法[J].西安电子科技大学学报,1999,26(3):281~285.
[6]李 慧.实孔径雷达波束锐化算法研究[D].电子科技大学硕士学位论文,2010.
[7]吴 迪,朱岱寅,田 斌,等.单脉冲成像算法性能分析[J].航空学报,2012,33(10):1905~1914.
[8]Zhu D Y,Wang L,Tao Q N,et al.ISAR Range Alignment by Minimizing the Entropy of the Average Range Profile[C].2006 IEEE International Conference on Radar,April 2006,813 ~818.
[9]Wang J and Kasilingam D.Global Range Alignment for ISAR[J].IEEE Trans.on AES,2003,39(1):351 ~357.
[10]Steinberg B D.Microwave Imaging of Aircraft[J].Proc.IEEE,1988,76(12):1578 ~1592.
