采用区域特征匹配的三维弹痕自动配准
2014-11-09韩冬松魏仲慧李一芒
韩冬松,何 昕,魏仲慧,李一芒
(1.中国科学院 长春光学精密机械及物理研究所,吉林 长春 130033;2.中国科学院大学,北京 1000493.中国人民解放军防化研究院,北京 102205)
1 引 言
枪弹头痕迹是涉枪案件中的重要线索和证据,弹痕比对检验学在公安实践中可以判断发射枪支以证实犯罪。传统的基于实物的弹痕比对依赖人的主观判断,基于二维图像的弹痕比对所面向的对象是弹痕的反光特性而非真实形貌,因此国内外学者根据枪弹痕迹的三维形貌开展枪弹比对的研究工作[1-2]。
三维弹痕数据的配准是三维弹痕自动比对中的关键技术,未经过配准而直接进行痕迹比对是不科学和无意义的。目前国内外三维弹痕自动比对系统所采用的配准方法都是通过硬件实现的,如加拿大的法医技术公司(Forensic Technology)和我国的安徽国盾高科技公司所采用的技术路线都是通过调整载物台的位置和姿态以控制不同待测弹头的位置和姿态保持一致。上述方法对硬件尤其是夹持弹头的载物台有很高的精度要求,且容易受到环境等因素的干扰。而采用计算机对三维弹痕数据进行配准可以在实现配准的同时降低对数据采集系统的要求。
国内外学者在三维数据配准领域进行了很多有意义的研究和实践工作,Nyúl LG等提出的基于体素相似性的配准方法目前广泛应用于医疗影像配准中,BESL P J等提出的迭代最近点(Iterative Closest Point,ICP)算法广泛应用在三维点云配准领域,而我国孙军华等学者提出的基于分层块状全局搜索的三维点云自动配准方法同ICP算法相比有更高的精度[3-5]。上述算法应用于三维弹痕配准时存在如下问题,由于弹头上擦划痕迹在尺寸方面与弹头本身体积相比非常细小,因此采用体素相似性的配准方法很难对同一型号的弹头进行配准;而ICP算法和基于分层块状全局搜索的配准方法则需要待配准对象包含明显特征,且配准过程相对复杂。
针对以上问题本文提出一种采用区域特征匹配的配准算法,首先通过改进的高斯滤波器分离三维数据中的弹头轮廓信息和因擦划产生的纹理信息,分离后截取纹理信息中特征最为丰富的区域,通过多项式拟合方法确定痕迹的位置和方向,最后以多条痕迹的组合特征作为基准通过旋转平移等操作完成两组三维弹痕数据间的配准。
2 弹痕数据预处理
2.1 弹痕三维数据的数学模型
通过菲索型干涉仪并采用四步相移技术对弹头进行测量能够获得一组3×n的二维数据以矩阵方式记为:
其中:d1i,(i=1,2...n),d2i,(i=1,2...n),d3i,(i=1,2...n)分 别表示测量点在摄像机坐标系下的位置坐标。矩阵D包含测量点在空间内完整的三维信息,但数据形式不适应计算机进行滤波、旋转、平移、显示等操作,因此需将矩阵D进行一定形式的变换以适应计算机处理。分析矩阵D可得如下性质:

根据上述性质,可将矩阵D转换成t×k阶矩阵:

其中:jij=d3,i·(k-1)+j,以j11为原点,规定矩阵行方向为x轴,自左向右为正方向,列方向为y轴,自上而下为正方向,行列间距用式(1)中的Δd表示,那么J(x,y)在数据形式上即可包括所有采集得到的三维信息,而J(x,y)的矩阵形式在数据格式方面便于计算机进行处理。
2.2 采用多尺度分析的数据去噪
J(x,y)可拆分成2部分表示,如式(2)所示:

其中:F(x,y)表示的是真实的枪弹痕迹三维信息,N(x,y)表示噪声。在枪弹痕迹的三维信息采集时,噪声的主要来源是测量系统的不确定度,这些噪声通过改进操作及测量方法,能够一定程度上得到削弱。在实际的测量过程中,噪声是对结果产生很大影响的随机信号,所以需要对J(x,y)进行去噪处理,使J(x,y)中N(x,y)分量尽量减少。小波变换以其良好的时频特性和多分辨率特性被广泛应用于各个领域的图像去噪,但信号处理中常用小波只有“水平”、“垂直”、“对角”3个有限方向的空间解析能力,这使小波变换在进行图像结构的曲线和直线的奇异性表示时效果不佳,且不能有效提取图像的纹理和边缘信息,小波变换在空间方向辨析能力的不足,使二维张量小波在处理含“线奇异”的函数时不能达到最优的非线性逼近。,剪切波(Shearlet)与小波变换相比,对图像的表示同时具有多分辨、局域性和方向性等优点。剪切波变换定义如下:


其中:T表示阈值。
2.3 基于高斯滤波的弹头擦划痕迹分离
通过剪切波去噪后得到的弹痕三维信息用F(x,y)表示,可以分为轮廓和纹理两部分组成。实际待比对对象是枪弹坡膛痕迹的相似度而非弹头轮廓。因此在配准前将轮廓信息和纹理信息分离后,利用纹理信息中的特征进行配准。弹头的轮廓和坡膛痕迹本质上是波长不同的数字信号,可以通过滤波的方法对其进行分离。
由于高斯滤波器相移为零,时频宽积同其他滤波器相比最小,其冲激与阶跃响应效果好,被称为是一种理想的时域响应滤波器,在几何测量领域,通常要求滤波过程应尽量减小对原始的几何形状的形变,因此高斯滤波器更加适合枪弹痕迹比对前进行轮廓信息与纹理信息的分离。空间域下的高斯滤波器表示为:

采用冲激响应不变法,设计32级逼近滤波器,幅度传输特性可由式(6)表示:
在一维空间下,数据一般具有局部性,由于信息量少而不能够反映整体的枪弹痕迹尤其是膛线痕迹特征,因此需要在对枪弹痕迹进行二维提取。将一维权函数扩展到二维空间以实现对枪弹痕迹的整体提取,更接近真实情况。二维高斯滤波器通过变换可以分离成x、y两个方向的一维滤波器,根据前文所述,不同方向级联形式的二维逼近高斯滤波器权函数为:

按上述方式设计的32级逼近滤波器对F(x,y)进行滤波可以分离轮廓信息和纹理信息,但由于实际弹痕纹理同x轴或y轴平行,二维滤波器不能按纹理方向提取有效信息,反而会损失一部分细节信息。本文设计分别采用x方向和y方向上的一维滤波器对去噪后的弹痕数据进行滤波,并截断边缘,可得到弹痕纹理信息I(x,y):

3 弹痕三维数据配准
3.1 配准算法设计
经过高斯滤波后分离得到的弹痕纹理信息I(x,y)中,包含子弹发射时同枪膛产生的擦划痕迹,这也是I(x,y)中最重要的特征信息。因此设计选取I(x,y)中痕迹特征最明显的区域作为特征区域,通过坐标变换实现不同弹头间表面纹理的配准。将达到最佳配准效果的坐标变换矩阵应用在原始三维弹痕信息配准中,算法流程如图1所示。

图1 三维弹痕配准算法流程图Fig.1 Flow sheet of the registration of 3Dbullet
在枪弹痕迹的三维测量时,以次棱为基准,能够作为判别依据的坡膛痕迹信息集中在次棱线的一侧,在实际处理时需对I(x,y)进行区域分割,保留坡膛信息,记为W(x,y)。次棱线及其一侧的擦划痕迹都可用基于最小二乘法的线性拟合公式求出痕迹所在直线的方程,通过直线方程确定坐标变换矩阵。由于数据采集过程中光学系统和配套硬件的各项参数保持不变,因此在配准时只考虑旋转、平移操作而不需考虑放大缩小操作。初步配准后以两组待配准数据间的互相关测度作为配准效果的评判标准,最后求出最佳坐标变换矩阵。
3.2 坐标变换矩阵
采用齐次坐标变换矩阵对三维数据进行旋转、平移等操作是调整位置和姿态的常用方法。齐次坐标变换矩阵(HTM)是在机器人运动学中用来描述刚体空间位置和姿态关系的4×4矩阵,其齐次变换坐标可以表示为:

其中:H 为变换矩阵,Wo(x,y)为变换前矩阵,Wn(x,y)为变换后矩阵。齐次坐标变换矩阵H 能够描述矩阵沿各坐标轴的平动(记为Δx,Δy,Δz)和绕个坐标轴的转动(记为 Δθx,Δθy,Δθz)。H 可分解为平移变换矩阵T和绕各坐标轴的旋转变换矩阵Rx、Ry、Rz:

通过拟合得到的特征线可以求得变换矩阵中Δx,Δy,Δz和Δθx,Δθy,Δθz的值。
3.3 互相关测度计算
通过拟合得到的特征线求取变换矩阵并不一定是能够得到最佳配准结果的变换矩阵,需要在一定范围内调节变换矩阵中的参数以达到最佳配准结果。本文引入互相关测度以评价配准结果的好坏。定义两组相同维数相同大小的数据互相关测度如下:

4 实验结果与分析
在PC机上使用MATLAB平台完成相关实验。采集某手枪弹头的原始数据后,对其直接进行三维显示,结果如图2所示。从图中可以看出显示效果与手枪弹头表面轮廓不符,证明原始数据不适应直接进行三维显示。

图2 原始数据三维显示结果Fig.2 3Ddisplay of the original data
将原始数据转换为计算机能够识别的三维数据后显示结果如图3所示。从图中可以看出弹头的轮廓和表面纹理信息,采用2.2中所述方法对数据进行去噪并同均值滤波法处理结果比较如图4所示。配准结果如图5所示,为了更直观地表示配准后的结果,将三维深度信息映射至灰度域内并按灰度图像方式显示配准结果如图6所示。
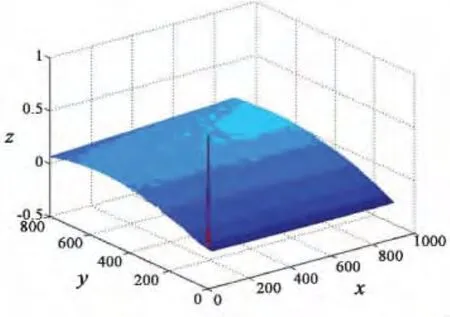
图3 变换后数据三维显示结果Fig.3 3Ddisplay of the data after transforming

图4 去噪结果对照Fig.4 Results of de-noising method

图5 弹痕三维纹理配准结果Fig.5 3Ddisplay of the registration

图6 弹痕三维纹理二维配准结果Fig.6 2Ddisplay of the registration of the 3D
针对弹头样本分别设计基于本文配准方法的弹头痕迹比对实验和原始三维弹头比对实验,结果如表1所示,其中D1与D2为同一支枪发射的子弹弹头痕迹数据集,D1与D3为同一型号不同枪支发射的子弹弹头痕迹数据集,D1与D4为不同型号不同枪支发射的子弹弹头痕迹数据集,每组数据集内样本个数为100,共计400发子弹。表1列出了D1与其他3组数据集间的互相关测度值。
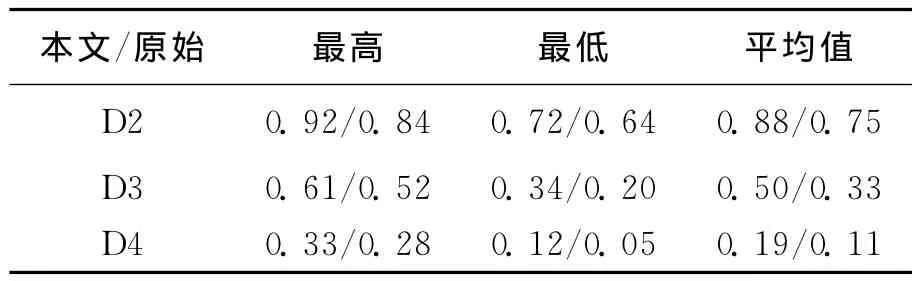
表1 互相关度比较结果Tab.1 Comparison results of the correlation
根据互相关测度计算结果制定弹痕比对策略,从表1可以看出采用本文配准算法能够消除不同比对情况下互相关测度值的重叠,能够将比对正确率从90%提高至98%。
5 结 论
三维枪弹痕迹比对在涉枪刑事案件侦破过程中有着重要的实用价值,三维弹痕自动配准是三维枪弹痕迹比对过程中的关键技术。本文提出了一种采用区域特征匹配的弹痕三维数据配准算法。通过剪切波阈值变换对数据进行去噪,避免弹头纹理信息的丢失。去噪后采用一维高斯滤波器从不同方向提取弹痕纹理信息,避免了轮廓信息对互相关测度的影响,最后通过齐次变换矩阵将不同弹痕三维数据调整至同一位置和姿态。实验表明,本文所提方法应用于计算机对枪弹痕迹自动比对时,能够将比对正确率从90%提高至98%。目前,该配准方法已经应用于某型三维枪弹痕迹自动比对系统中。
[1]Forensic Technology.A superior solution:What makes forensic technology’s IBIS TRAX-3Dthe most advanced ballistic imaging solution in the world today[EB/OL].http://www.forensictechnology.com,2009.
[2]狄芳,顾辉.弹痕三维数据与图像处理研究[J].兵工自动化,2011,30(12):41-43.Di F,Gu H.3Ddata and image processing research on the bullet mark[J].Ordnance Industry Automation,2011,30(12):41-43.(in Chinese)
[3]Nyúl L G,Udupa J K,Saha P K.Incorporating a measure of local scale in voxel-based 3-D image registration[J].IEEE Trans.Med.Imaging,2003,22(2):228-237.
[4]Besl P J,Mckay N D.A method for registration of 3-D shapes[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
[5]孙军华,谢萍,刘震,等.基于分层块状全局搜索的三维点云自动配准[J].光学精密工程,2013,21(1):174-180.Sun J H,Xie P,Liu Z,et al.Automatic 3Dpoint cloud registration based on hierarchical block global search[J].Optics and Precision Engineering,2013,21(1):174-180.(in Chinese)
[6]李一芒,何昕,魏仲慧.采用三维形貌特征匹配的弹痕自动比对[J].哈尔滨工程大学学报,2013,34(3):1-7.Li Y M,He X,Wei Z H.Automatic comparison of bullet marks by matching 3-D topography of different bullets[J].Journal of Harbin Engineering University,2013,34(3):1-7.(in Chinese)
[7]张明照,牟建华,刘扬,等.应用复 Morlet小波变换分析条纹图相位[J].光学精密工程,2012,20(3):643-650.Zhang M Z,Mou J H,Liu Y,et al.Phase extraction for fringe patterns based on complex Morlet wavelet transform[J].Optics and Precision Engineering.2012,20(3):643-650.(in Chinese)
[8]冈萨雷斯.数字图像处理[M].2版.北京:电子工业出版社,2007:276-322.Gonzalez R C.Ditital Image Processing [M].2nd Ed.Beijing:Pubushing House of Electronics Industry,2007.(in Chinese)
[9]Guo K,Labate D.Optimally sparse multidimensional representation using shearlets[J].SIAM J.Math Anal.2008,39(1):298-318.
[10]王雷,李彬,田联房.基于平移不变剪切波变换的医学图像融合[J].华南理工大学学报:自然科学版,2011,39(12):13-18.Wang L,Li B,Tian L F.Medical image fusion based on shift-invariant shearlet transformation [J].Journal of South China University of Technology:Natural Science Edition,2011,39(1):298-318.(in Chinese)
[11]杨国梁,雷松泽.基于贝叶斯估计自适应软硬折衷阈值Curvelet图像去噪技术[J].西安工程大学学报,2011,25(6):857-861.Yang G L,Lei S Z.The image denoising method of soft and hard adaptive thresholding based on curvelet transform and Bayesian estimation[J].Journal of Xi’an Polytechnic University,2011,25(6):857-861.(in Chinese)
[12]乔培玉.基于三维形貌的弹痕比对系统的研究[D].北京:中国科学院大学,2012.Qiao P Y.Research on ballistics of bullet comparing system based on three dimensional surface topography[D].Beijing:University of Chinese Academy of Sciences,2012.(in Chinese)
