一种改进的移动机器人自定位算法
2014-10-22蒙禾青包琨超王宗玉
张 琪,蒙禾青,周 嵘,包琨超,王宗玉
(1.武汉理工大学 信息工程学院,湖北 武汉 430070;2.西安交通大学软件学院,陕西 西安 710049)
自定位是移动机器人的核心问题。通过自定位,移动机器人可以在特定环境中完成人类指定的各种任务,例如传递指令、取送物品、危险物排除、管理办公室或家居和机器人足球等[1-2],因此这项研究具有重要价值。移动机器人的定位,需要两个条件:一是感知内、外环境的传感器,例如笔者采用经典的测距传感器来获取环境信息;二是关于行走环境的地图。地图的获取有两种方式,一是机器人在行走过程中根据实际量测来自动绘制环境地图;二是把已经标定好的环境地图存放在移动机器人的芯片中。为了简化问题,笔者采用第二种方式,即地图在自定位之前已经获得。地图采用离散栅格形式,如图1所示。其中黑色栅格表示障碍物,用数字0表示,而白色部分表示机器人可以通过的栅格,用数字1表示。
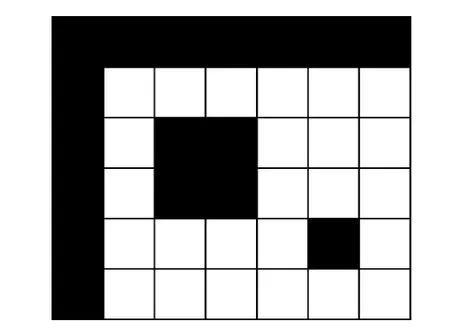
图1 离散栅格地图示例
地图建立以后,机器人通过移动,不断获取与墙壁或周边物体的距离信息,经过与地图的匹配,逐步判断机器人在当前时刻的位置和方向。由于机器人定位是一个非线性、含有较多不确定性因素的问题,因此当前主要采用基于贝叶斯滤波的概率推导方法,如卡尔曼滤波器、多峰值估计法、马尔科夫定位和蒙特卡洛法等[3-4]。在实例方面,卡内基梅隆大学与德国伯恩大学基于蒙特卡洛方法,合作研发出博物馆导游机器人Rhino及Minerva,可以从博物馆中任意一个位置出发,较快地实现自定位[5]。
国内对于自定位问题的研究起步相对较晚,主要集中在近10年内。如利用马尔科夫算法对机器人进行定位;利用改进的自适应粒子滤波算法,降低运算复杂度,提升算法稳健性;利用特征粒子提取思想,降低粒子数目;采用改进的Hough密度谱和Fouder-Mellin变换方法来估计机器人的运动参数等[6-9]。
笔者将基于粒子滤波器原理,对已知地图的轮式移动机器人的自定位展开研究。在经典粒子滤波算法的基础上,提出了两个改进策略,可在保证跟踪精度的同时,显著减少计算量:
(1)粒子初始化时,每个粒子的角度经过一次匹配得到,可减少计算量。具体来说,首先估计每个粒子在所有可能方向上与周围环境的距离,然后将这些距离估计值与移动机器人的测距传感器测量值进行匹配,找出最接近该测量值的角度,作为该粒子的初始角度。这样不仅能减少自定位所需要的粒子数,而且能减少在计算移动机器人角度方面的计算量。
(2)采用查表式方法估计距离,可提高定位效率。首先对环境地图进行离散化,其后针对地图中每个小格,进行360度等间隔离散,并计算各角度上该小格与周围环境的距离,将其存为表格形式。当机器人在环境中行走,并获得量测距离时,可以直接调用上述表格文件,通过查表方法,判断各个粒子在各方向上的概率,从而减少自定位的在线计算时间,增强机器人运行及定位的实时性。
1 机器人运动模型
在对轮式机器人分析的过程中,常把机器人建模为轮子上的一个刚体,在水平面上运动。参见图2,建立平面坐标系XOY,则机器人的位置和姿态可以用如下状态向量表示:

式中:x,y为机器人在二维直角坐标系中的位置坐标;θ为机器人的朝向,即机器人运动正方向与X轴的夹角。
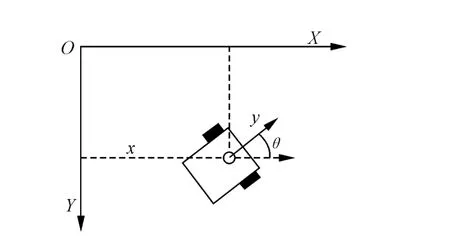
图2 机器人状态示意图
假设在 t1时刻机器人处于状态 S1(x1,y1,θ1),若机器人左右轮都进行匀速运动,经过短暂时间 Δt之后,机器人处于状态 S2(x2,y2,θ2),那么这段时间内机器人的运动可近似看作圆周运动,其运动模型如图3所示。
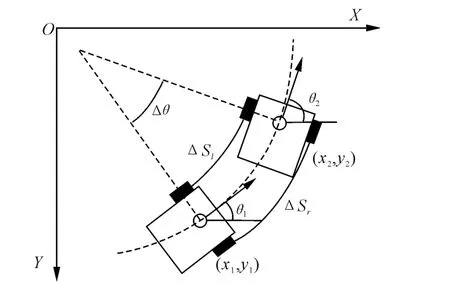
图3 运动模型
则当前状态 S2(x2,y2,θ2)与上一状态 S1(x1,y1,θ1)之间的关系为:
式中:Δsr和Δsl分别为右轮和左轮一次行走的距离;b为机器人同轴两个轮子间的距离;Δs和Δθ分别为机器人一次运动行走的距离和方向的变化,这两个量即为机器人在自身局部坐标系中的移动和转动,式(2)即为局部坐标系与全局坐标系之间的转换公式。
2 移动机器人自定位设计
2.1 移动机器人定位贝叶斯建模
移动机器人定位原理图如图4所示。可以采用概率图来描述移动机器人的运动过程,其中ut为作用于机器人的控制信息,pt为t时刻移动机器人的状态,ct为机器人在t时刻得到的传感器距离信息。

图4 移动机器人定位原理图
可以将机器人定位理解为贝叶斯滤波问题。机器人依据获得的量测信息,以一定的置信度(Belief)确定它的位置:

式(5)表示在已知0~t时刻的所有控制数据及观测数据 d0…t={ct,ut-1,ct-1,ut-2,…,c0}的情况下,机器人在t时刻位于状态pt的概率。
结合贝叶斯公式变换可得到:

由于系统具有马尔科夫性,且 P(ct|ut-1,ct-1,ut-2,…,c0)为一常数,因此式(6)可进一步简化为:

通过对状态空间离散化,则式(7)可以写为:


式中,E为离散后的状态空间。
2.2 基于粒子滤波器的数值化实现
式(8)给出了离散状态空间中的定位模型,由于各种先验概率、似然度函数往往不具备解析形式,可能为非线性、非高斯的概率,直接由式(8)来解析求解状态是不可能的。
因此笔者采用经典的粒子滤波器来数值化求解式(8)。粒子滤波器也称为序贯蒙特卡洛方法(sequential Monte Carlo,SMC),是一种在时间序列上的离散、非参数式的贝叶斯滤波方法,能够处理各种非线性、非高斯、多模态问题。
2.2.1 状态方程及量测方程
机器人的定位问题可以描述为:给定一组观测向量Ct,估计机器人当前所在状态pt。其中:Ct={c0,c1,…,ct}为观测序列;pt=[xt,yt,θt]T为机器人在t时刻的位置和朝向。
设移动机器人状态方程为:

式中:ut为机器人的运动控制输入变量;wt为过程噪声。函数f(x)由机器人的运动模型给定,即在式(2)的基础上加上噪声wt,则可得:
式中,ws和wθ分别为机器人的运动距离和偏转角度的噪声。
系统状态量测方程为:

式中:M为环境地图;vt为量测噪声;pt的估计由求解Bel(pt)得到。
2.2.2 初始化粒子
移动机器人自定位程序首先是粒子的初始化。初始的粒子服从均匀分布,即每个粒子出现在图像中任意一个点的概率都是1/N,其中N为移动机器人在地图上可能出现的位置总数。
由式(1)可知,粒子的初始化除了要初始化粒子的位置之外,还要初始化粒子的朝向角度,即θ。因此需要大量的粒子来表示移动机器人所有可能的位置和角度,计算量非常大。
假定θ值按均匀分布生成粒子,即θ~U(0,2π),那么当某个粒子的坐标与机器人的真实2D位置吻合时,该粒子随机生成的θ与机器人真实的方向吻合的概率并不大,从而造成计算浪费。
实际上,在已获得距离量测的情况下,状态向量中角度分量θ是不独立的,其与其他两个分量,即机器人在二维空间的坐标x、y是相关的。因此可以把状态变量分为两个部分,则有式(12):

根据式(12),首先基于均匀分布p(xt,yt)~U(M)对二维坐标x,y进行采样(M为环境地图),然后对于每一个粒子,求出该粒子在自己位置上匹配权重最大的角度,将该值作为θ的初始值,这与文献[10]提出的方法有些类似,都是把状态向量分为几个部分,将联合概率分解为条件概率的乘积形式。而笔者的创新之处在于,结合坐标分量和量测来直接估计每个粒子的角度分量。其优点在于既能有效提高粒子的采样质量,又能极大地减少用于确定机器人朝向的粒子数量,并且在以后的定位计算中也不需要再考虑移动机器人的θ值问题,只需根据式(10)将机器人运动产生的θ值的变化量Δθ加到每个粒子的θ值即可,不用再计算移动机器人的θ值。
2.2.3 粒子重采样
在完成粒子的初始化之后,每个粒子的权重也在初始化θ值时赋给了每个粒子。此时就可以找出权重最大的粒子作为本次机器人位置的最佳估计。下一步的工作就是对粒子进行重采样,为下一次估计机器人位置做准备。
重采样的目的是去掉权重小的粒子,同时将权重大的粒子分解成若干个权重较小的新粒子。重采样的思想可以用图5来表示。
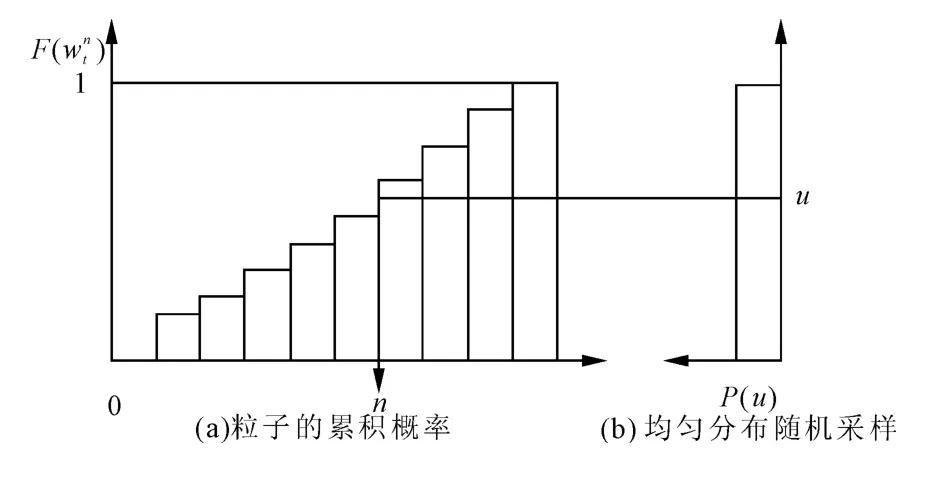
图5 重采样示意图
图5(a)为粒子权重的累计概率分布函数,横坐标为粒子的序号;图5(b)为0~1间均匀分布的随机变量,u为该随机变量的一次采样值重采样过程中,首先计算出粒子概率的累积概率,然后在0~1间按均匀分布随机采样,投影到图5(a)中,投影的位置向下指示出累积概率相应定义域的位置,这就是新粒子的索引。这样共产生L个粒子,其权重都重置为1/L。显然,权重大的粒子就可能会被多次重复采样。
2.2.4 粒子状态预测
完成了粒子的重采样之后,机器人运动一次。根据里程计的返回值由式(3)和式(4)计算出这一次运动后,机器人相对运动前的位置和角度的变化,并由该变化量按照式(10)系统状态方程,更新每个粒子的位置和角度,使每个粒子都能相对于自己上一时刻的位置和角度,作与移动机器人相同的运动。
如机器人向前走了10 cm,每个粒子也按自己的方向向前走10 cm。实际环境中由于受车轮打滑、里程计测量有误差等因素的影响,虽然里程计返回值是10 cm,但机器人很有可能不是走了刚好10 cm。因此式(10)引入了过程噪声wt。
2.2.5 粒子权值更新
在所有粒子都随移动机器人运动后,下一步的工作就是为所有粒子重新计算权值。
基于环境栅格地图,对于每一个粒子,根据该粒子的状态(包含位置及方向),计算出该粒子在该方向上与环境的距离d,并将距离值与移动机器人测距传感器的真实返回值d^相比较,从而求出式(8)中的P(ct|pt):

式中:C为归一化系数;∑为由传感器量测噪声vt的方差。
由于粒子的数目非常多,如果用实时计算的方式来求解每个粒子的测量值会需要很长的时间。因此,设计了一种基于查表方式的权值更新方法。首先在离线形式下,把机器人在地图中所有可能的位置和姿态列出来,并计算出相应各传感器的距离信息,生成一个二进制文件。
通过查表方法,可以实时地将需要的数据d^从文件中找出来,由式(13)计算量测概率,从而减少了机器人自定位的计算量,缩短了机器人两次运动之间的时间,增加了自定位程序的实时性,但也一定程度地增加了机器人内存的消耗。
基于粒子滤波理论的移动机器人自定位程序的流程图如图6所示。
3 仿真实验及结果分析
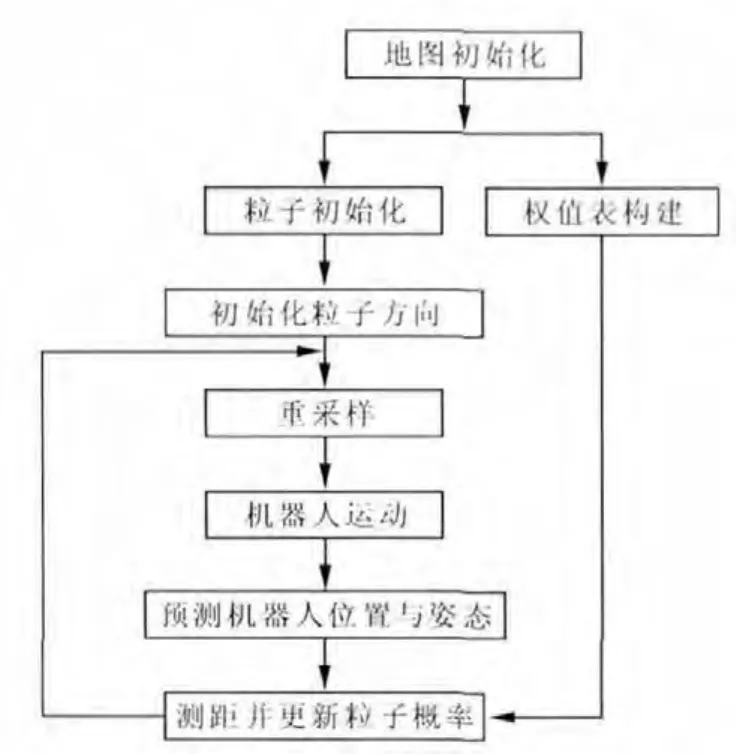
图6 自定位流程图
笔者使用VC2005对算法进行仿真。图7中使用的粒子数为3500,灰色区域为障碍物和墙壁,灰色的点为粒子。实线为仿真程序生成的机器人实际位置,机器人前方两条线的长度表示两个测距传感器的实际测量值;虚线为机器人最优估计粒子的位置和方向,两条射线的长度表示在该位置和方向上,两个测距传感器对应的测量估计值,可以通过查表获得。
仿真使用的地图是由4个房间和1条走廊以及每个房间内的障碍物组成简单结构的环境。由于仿真环境地图比较简单,环境中存在对称的点,则机器人在自定位时,粒子会集中到这些与机器人所在真实环境对称的点附近,只有当机器人运动到独特的位置时,所有的粒子才会聚集到机器人的真实位置附近。
图7(b)为机器人仿真定位程序的第1次定位结果。与图7(a)的初始状态相比,粒子已经开始聚集,不过由于信息还比较少,因此最优的粒子与实际的机器人位于不同房间。
图7(c)为仿真程序的第2次定位结果,与第1次定位的结果相比,粒子又进一步集中,且最优估计状态也正确估计出机器人所在房间。
随着机器人的运动,距离量测信息越来越多,第4次定位后,效果比较明显,参见图7(e),到第6次定位完成后,估计就非常准确了,参见图7(f)。
将笔者提出的算法与经典蒙特卡洛算法进行比较可知,笔者采用了角度计算策略,而经典算法直接对式(1)状态进行采样;笔者采用了查表计算权值,而经典算法是采用在线计算粒子权重的方法。
采用的仿真实验粒子数为3500,运行环境为Windows Xp下 VS2005,奔腾双核 2.6 G,1 G 内存。比较结果如表1所示,可以发现笔者算法在耗时及收敛速度上具有优越性。
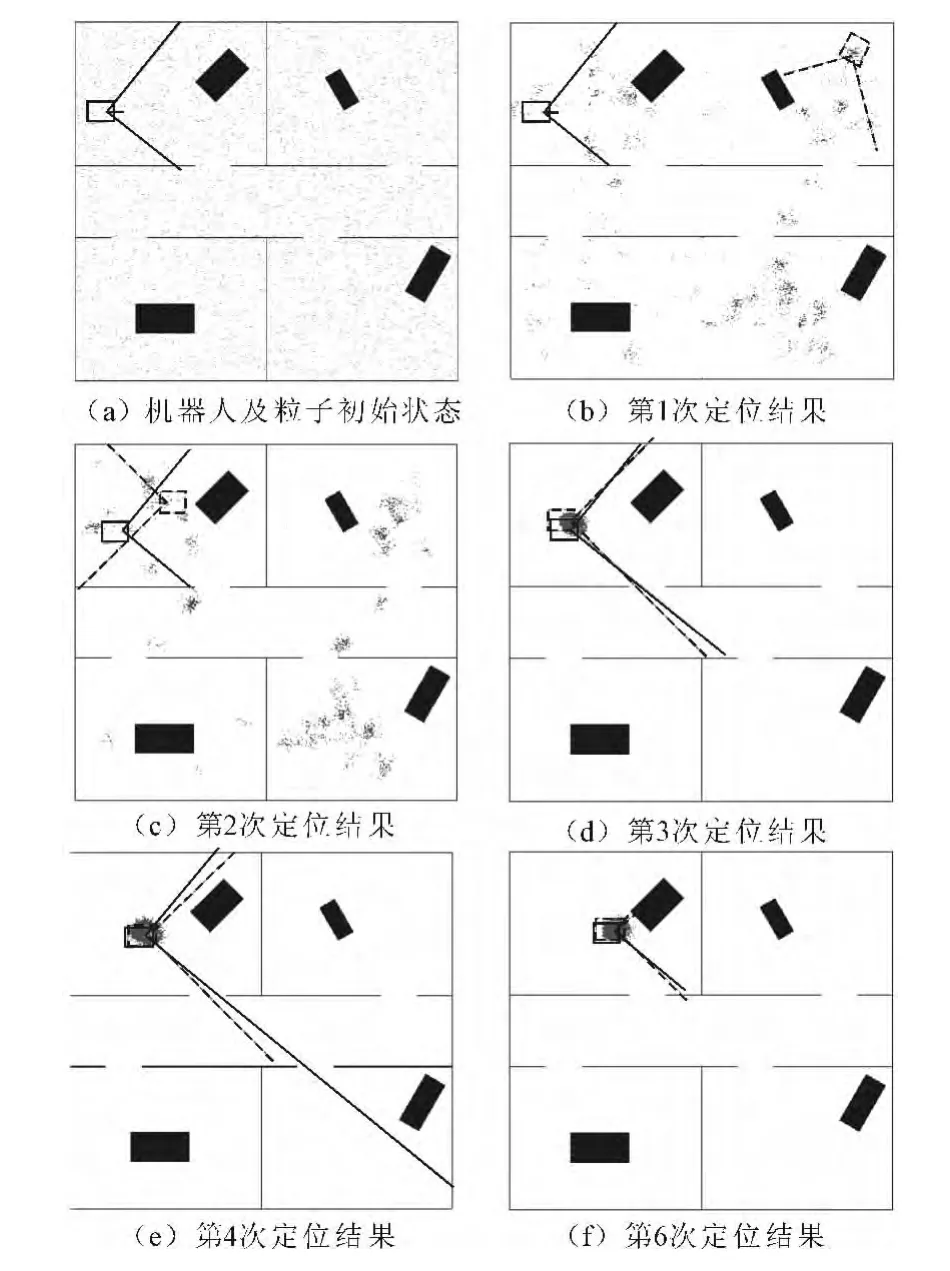
图7 笔者算法定位仿真
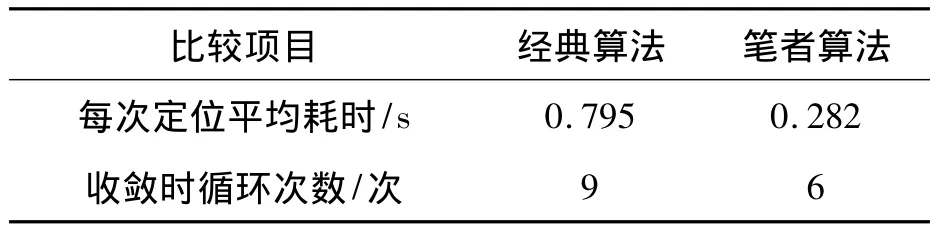
表1 笔者算法与经典蒙特卡洛算法比较
4 结论
笔者针对经典蒙特卡洛定位算法,提出了两种改进策略。首先粒子初始化时,每个粒子的角度经过一次匹配得到,从而减小了计算量。其次,采用离线方式计算场景的权重表,在定位过程中,经过直接查表,可极大地减少定位的时间消耗。
通过与经典蒙特卡洛定位算法的比较,笔者的算法具有计算量小,收敛速度快的优点。
[1]蔡自兴.机器人学[M].北京:清华大学出版社,2000:16-25.
[2]IEGWART R,NOURBAKHSH I R.自主移动机器人导论[M].李仁厚,译.西安:西安交通大学出版社,2006:21-120.
[3]DURRANT-WHYTE H,BAILEY T.Simultaneous localization and mapping:part I[J].Robotics & Automation Magazine,IEEE,2006,13(2):99 -110.
[4]BAILEY T,DURRANT -WHYTE H.Simultaneous localization and mapping(SLAM):part II[J].Robotics& Automation Magazine,IEEE,2006,13(3):108-117.
[5]THURN S,BEETZ M,BENNEWITZ M,et al.Probabilistic algorithms and the interactive museum tourguide robot minerva[J].International Journal of Robotics Research,2000,19(11):972 -999.
[6]方正,佟国峰,徐心和.基于贝叶斯滤波理论的自助机器人自定位方法研究[J].控制与决策,2006,21(8):841-862.
[7]曾慧,吴福朝,胡占义.基于平面激光测量的移动机器人自定位方法[J].自动化学报,2007,33(2):138 -144.
[8]刘承俊,原魁,邹伟,等.基于特征粒子的Monte Carlo自定位方法[J].机器人,2006,28(1):30 -35.
[9]陈卫东,张飞.移动机器人的同步自定位与地图创建研究进展[J].控制理论与应用,2005,22(3):455 -460.
[10]OLIVIER C,SIMON J G,ERIC M.An overview of existing methods and recent advances in sequential Monte Carlo[J].IEEE,2007,95(5):654 -662.