CAN总线造波机测控系统研制与应用
2014-10-22潘琼文
戚 磊 陈 赵 潘琼文 崔 岩 韩
(中国船舶重工集团公司第七0二研究所,江苏 无锡 214082)
CAN总线造波机测控系统研制与应用
(中国船舶重工集团公司第七0二研究所,江苏 无锡 214082)
为了更准确地模拟波浪对物体的影响,设计并研制了CAN总线造波机测控系统。该系统由工控机、交流伺服控制器、伺服电机等主要部件组成,采用CAN总线通信。硬件方面设计了电气控制柜,软件方面设计了人机操作界面,造波环节采用位置闭环控制,波浪测量环节采用开环控制。实际应用中系统测控能力强,所测波浪数据稳定性好、精度高,验证了该系统具有优越的测控性能及造波性能。
CAN总线 交流伺服 造波机 测控系统 人机界面
0 引言
造波机是一种与海浪试验水池配套的基础设施。它的作用是在试验水池中造成不同波长和波高的波浪,模拟实际波浪对船舶或建筑等的影响,以测定各种技术数据,为相关设计提供依据。造波机形式多样,包括摇板、推板、冲箱、压缩空气等,实现方式有电液伺服、交流伺服电机等[1-2]。无论哪种形式的造波机,其测控系统始终是整个造波机的灵魂。测控系统的品质决定了造波机的品质,包括波浪种类、精度、稳定性以及操作便易度、安全性能等。
本文所研制的造波机测控系统是应用于试验水槽的推板式造波机。该测控系统是以基于CAN总线通信的伺服电动机来实现的。系统具有操作方便、稳定可靠、控制精确等特点,所制波浪具有高度高、稳定性好、精度高等特点。
1 系统总体结构
本测控系统由上位机、CAN通信适配卡、交流伺服控制器、交流伺服电机、旋转变压器、造波推板、浪高仪、A/D采集卡等组成,如图1所示。
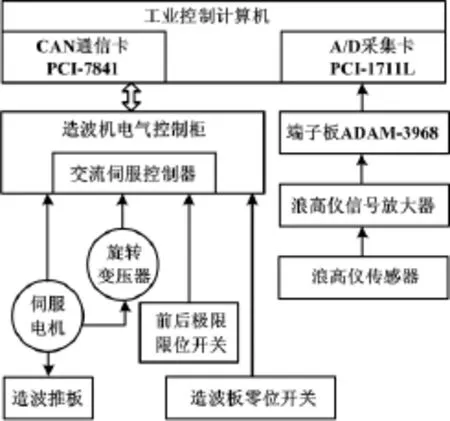
图1 测控系统总体结构图Fig.1 Structure of themeasuring and controlling system
测控系统在造波测控部分采用位置闭环控制。上位机通过CAN通信适配卡与交流伺服控制器建立CAN通信连接,上位机以CAN总线通信方式下发控制指令至伺服控制器。伺服控制器与伺服电机之间通过动力电源线建立动力连接,驱动电机运转。由旋转变压器检测电机实际相位并通过信号线反馈至伺服控制器。伺服控制器将电机相位、伺服状态、报警信号等实时信息以 CAN总线通信上传至上位机,形成闭环控制。
测控系统在波浪测量部分采用开环控制。上位机发出波浪采集指令,由浪高仪对实际波浪进行采集,通过A/D采集卡上传至上位机,进行记录分析并保存。
2 CAN总线通信设计实现
在测控系统中,上位机是大脑,交流伺服控制器是心脏,两者之间的通信至关重要。本设计采用CAN总线方式进行通信。
设计中选用伦茨伺服9300系列伺服控制器。利用伺服控制器自带的CAN功能模块,通过相应配置即可实现CAN通信。上位机配备一块CAN通信适配卡,选用PCI-7841,即插即用。同时,其自带相应的驱动函数库,可进行简单调用,省去很多编程工序。
在伺服控制器中,CAN功能模块相关参数设置至关重要。CAN通信时间依赖于以下几个因素:控制器处理时间、报文时间、数据优先级、总线负荷等。其中,在设计中可设置的有控制器处理时间和报文时间两个参数。参数数据处理时间大约为30~50ms,过程数据大约需1~2ms;报文时间受波特率和报文长度影响,这里波特率设为500 kbit/s。设置系统总线地址,通过C0358=1置位,可进行基本通信。
3 系统硬件设计实现
造波机测控系统硬件组成部分中电控柜是关键。上位机和执行部件伺服电机通过电控柜建立连接,进行控制与反馈。电控柜是以伦茨伺服控制器为核心来设计实现的。伺服控制器外围电路原理图如图2所示。

图2 伺服控制器外围电路原理图Fig.2 The peripheral circuit of the servo controller
为改善输入电源品质,在伺服控制器输入电源前的主回路中采用了电抗器。
伦茨伺服控制器自身具备数字量输入输出端子模块X5,可通过对系统参数C0114、C0117、C0118的设置,任意配置模块X5中端子的高、低电平有效,使其作为控制信号和监控信号使用。本设计通过配置,将这些端子用作使能控制、极限限位、运行指示、故障报警等信号。
反馈系统采用旋转变压器对电机转速位置等信号进行检测,反馈信号通过输入模块X7接收。制动系统采用制动斩波器对瞬间多余的能量进行处理,防止对设备造成损害。为保障输入输出信号质量,所有的线缆均采用屏蔽电缆来实现。
4 系统软件设计实现
造波机测控系统中,所有的测控指令都是通过上位计算机人机操作界面来输入并下发,所有的实时反馈信息、测量采样以及图形曲线显示都是通过人机操作界面来读取。为此,采用VB软件编制了本测控系统的人机操作界面控制系统。其主要由以下5个功能块组成。
①CAN总线通信模块。上位机测控系统与伺服控制器之间采用系统总线(CAN)通信。这里CAN协议采用的报文格式为标准格式。在标准格式中,首先是报文的起始位(SOF);接着是由11位标志符和远程发送请求位(RTR)组成的仲裁场;然后是6位的控制场,它包括标志符扩展位(IDE)、保留位、4个字节的数据长度(DLC);其次是8个字节的数据场;其后是一个循环冗余检查(CRC);应答场(ACK)包括应答位和应答分隔符;最后是帧结束。
②状态监控模块。监控伺服通信、伺服准备、伺服运行、伺服故障、造波板零位、造波板前后极限、造波板位置状态等信号。
③自动寻零模块。造波启动使能后,首先判断造波板是否处于造波零位,若未处于零位,则自动寻零,找到零位后才开始造波。
④规则波测控模块。包括参数设置模块、启停模块、采样模块、图形曲线显示模块。在参数设置模块中,设置规则波的输入参数(频率、波高或造波板冲程、时间)后,控制系统生成造波目标曲线。当造波启动使能后,若造波板处于零位,控制系统将目标曲线以每10ms一个数据的速度发送至伺服控制器,伺服控制器同时接收旋转变压器反馈的电机数据。由此形成闭环控制,得到电机控制指令,驱动伺服电机完成造波任务。在造波过程中,图形曲线显示模块将实时显示由A/D转换卡输入得到的实际波高数据以及旋转变压器得到的造波板实际运动轨迹。采样模块将对所需要的实际浪高数据进行记录保存。
⑤极限位置保护模块。判断造波板是否位于极限位置。若位于极限位置,则发出报警,停止造波,并可根据提示操作,使造波板向该极限相反方向复位。
人机操作界面功能的实现是通过控制系统循环扫描、功能模块调用来实现的。规则波造波实现流程如图3所示。

图3 规则波造波实现流程图Fig.3 Flowchart ofwavemaking for regular wave
规则波测控系统人机操作界面使能后,首先执行CAN总线通信模块,人机界面与伺服控制器之间以CAN总线方式进行数据交换。调用状态监控模块,控制系统以100 Hz的频率循环扫描检测CAN总线通信状态、故障报警信号、造波板极限位置信号、造波板零位信号、控制器准备状态信号、运行状态信号等。若出现故障报警信号,则及时停机,待故障清除后系统方可运行。若造波板位于极限位置,则调用极限位置保护模块,执行其复位功能,使造波板向极限位置相反方向运行。
执行规则波测控模块,输入规则波参数,待造波启动使能后,调用自动寻零模块。造波板如为初次启动,则判断其是否位于造波零位,如果不是零位,则自动寻零。若找到零位,系统自动记录并退出寻零模块,进入规则波测控模块继续执行造波命令,将规则波目标数据循环下发至伺服控制器,控制造波;若未找到造波零位,则发出报警信号,造波停止。造波过程中,可执行图形曲线显示模块,实时查看造波板运行轨迹曲线与实际波高曲线;可执行规则波采样模块,对所需要的波高数据进行记录保存。
5 系统应用及数据分析
本文中所研制的造波机测控系统已成功应用于多套水槽推板造波机中。在水深1 m的水槽试验中,部分实测波形如图4所示。
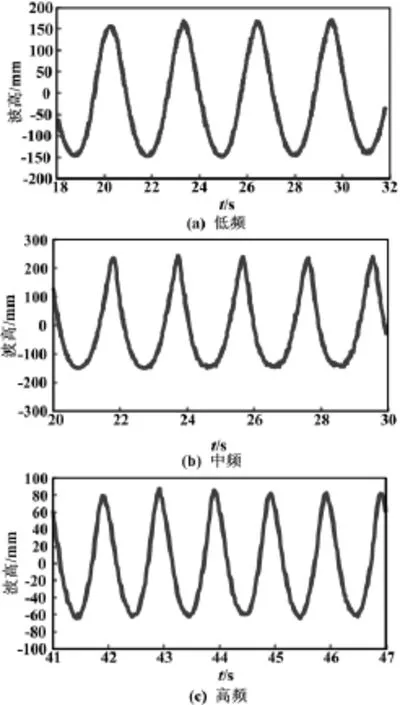
图4 实测波形图Fig.4 Themeasured waves
图4分别选取了该造波机在频率f=0.324 Hz、造波板行程S=500 mm时的低频工况,频率f=0.515 Hz、造波板行程S=380mm时的中频工况,频率f=1.0 Hz、造波板行程S=70mm时的高频工况。
通过对图4波形曲线的读取和分析,得到不同频率下实测波浪的相关分析数据,如表1所示。
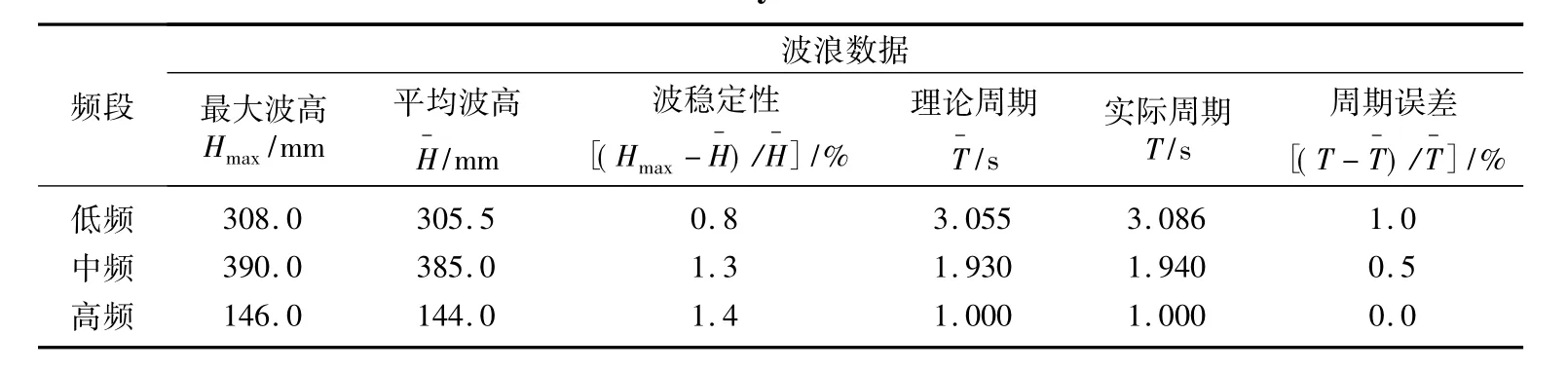
表1 实测波浪相关分析数据Tab.1 The relevant analytical data ofmeasured wave
从表1可以看出,在1m水深时,该测控系统造波机规则波最大波高可达390mm,波高稳定性≤2%,波周期误差≤2%。
6 结束语
本造波机测控系统采用CAN总线通信,保证了数据传输的实时性与可靠性;利用交流伺服控制器实现了位置闭环控制模式,保证了造波定位的精确性;设计了人机操作界面,实现了操作的灵活与简便;优化了自动寻零、极限保护等功能,保证了系统运行的快捷与安全。同时,在设备制动、系统抗干扰等方面增加相应措施,保证了设备的安全性与可靠性。经实际应用验证,本测控系统应用于试验水槽推板造波机后具有优越的造波性能,波浪高度高、稳定性好、精度高。
[2]杨森华,孔翔金.造波机及造波技术原理[C]//海洋工程试验设备论文集,1996:38-40.
[3]马玉麟,孙永明,王帅军.水池造波技术及发展概况[J].科技资讯,2012(10):55-56.
[4]张群,王静,杨洪齐,等.伺服电机驱动式无反射不规则波造波机系统[J].中国水运,2012,12(6):111-112.
[5]朱莉,黄晶华,赵丽君.水槽造波机的参数确定及结构设计[J].现代电力,2011,28(4):44-48.
[6]张亚群.造波机的控制及其实现[D].武汉:武汉理工大学,2007.
[7]徐旭.电动造波机交流伺服控制系统的研究[D].天津:天津大学,2007.
[8]张瑞波,王收军,朱国良.伺服电机驱动式水槽造波机系统设计[J].机械设计,2007,24(10):40-42.
[9]李俊,陈刚,杨建民,等.海洋工程试验中多单元造波机波浪模拟方法[J].海洋工程,2011,29(3):37-42.
[10]张晓丽,杨健,关海波.波浪水槽模拟波浪技术的研究[J].海洋技术,2008,27(1):129-131.
[1]杨森华.造波机理论计算方法[C]//海洋工程试验设备论文集,1996:1-3.
Development and Application of the Measuring and Controlling System Based on CAN Bus for Wave Making Machine
In order to accurately emulate the influence ofwave on objects,thewavemakingmachine based on CAN bus has been designed and developed.The system consists of IPC,AC servo controller,and servomotor,etc.,and adopts CAN bus communication.The electric control cabinet is designed for hardware,and man-machine interface is designed in software.The position closed loop control is used in wave making section;and the open loop control is used in wavemeasuring section.The practical application shows that the system possesses powerful control and measurement capability,the wave data measured are highly stable and with high accuracy.The superior measuring and controlling performance and wavemaking performance of the system are verified.
CAN bus AC servo Wavemakingmachine Measuring and controlling system Man-machine interface
TP23
A
修改稿收到日期:2013-12-24。
戚磊(1982-),男,2008年毕业于哈尔滨工程大学控制理论与控制工程专业,获硕士学位,工程师;主要从事伺服控制、电气传动方面的研究。
