基于晶闸管软起动控制器的软件系统设计
2014-10-21杨铭
摘 要:本文介绍了三相异步电动机晶闸管软起动的控制原理,详细说明了软起动器的软件系统的设计,说明了基于晶闸管软起动控制器的软件系统的实用性和优越性。
关键词:晶闸管软起动器;软件系统;设计
0 引言
当三相异步电动机在直接启动时,其电流值最高可以达到额定电流值的4~7倍,启动电流如此之大,对电网造成冲击将会非常的严重,形成过大的电压降落,从而使电网的电能质量降低并对其他设备的正常运行形成一定的影响;转矩冲击过大也会导致机械形成应力冲击,对电动机本身以及拖动设备使用的寿命造成严重影响。使用三相异步电动机晶闸管软起动器,能够使电动机的启动电流得到有效控制,使电网供电质量全面提高,也可以对传动机构以及电动机形成一定的保护,而软件系统的设计对于晶闸管软起动控制器性能的优越与否意义极其重大。
1 分析晶闸管软起动的控制原理
软起动器通常都是采用三相反并联晶闸管来作为其调压器,并将其接入电动机定子与电源之间。
2 探讨软件系统的设计
本系统程序设计采用C语言,运用模块化思想,其主要特点是通用性强、思路清晰、更易于查找故障。主要分为系统自检和初始化、起动方式及参数设定、执行相应起动程序、处理故障等相关中断、软停等部分。由主程序、故障检测模块、软起动模块以及同步中断等各模块组成了整个系统软件。
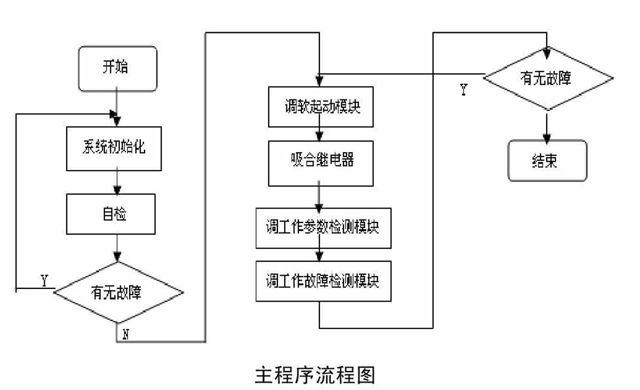
2.1 系统主程序流程分析
下图为主程序流程图,如图所示,主要功能以完成DSP内部定时器、中断系统、堆栈指针、寄存器区、RAM、I/0口、A/D、D/A等各个单元系统的初始化为主。
2.2 故障检测模块
该模块主要检测起动完成前及完成后的异常故障,例如:断相、过载、短路、堵转以及起动时间过长等各项故障,并会及时有效的形成反应(像跳闸)。
2.3 软起动模块
此模块的控制原则可采用恒流或者斜坡电流,按照接收互感器所传送的电流信号与电压的同步信号,在其经过单片计算以后,根据事先获取的数学模型当前晶闸管触发角的大小便可以得到,再按照触发角的大小严格地根据顺序送出,从而使三相异步电动机实现软起动功能。
2.4 同步中断模块
整个程序的流程当中,同步是极其重要的环节,触发脉冲延迟的基准便是同步,一旦同步中断模块出现错误,整个系统将会出现极其严重的错误,例如:误触发以及触发脉冲丢失等。首先应该进行中断的初始化,开相应中断,对中断信号的正确性进行判断,然后进入整个系统流程,即先对A/D进行采样与计算,然后再调用与之相对应的起动子程序对晶闸管触发角进行严格计算,既触发脉冲延时的时间,再次进入到延时触发中断程序,对相应的延时程序进行调用,最后准确中断然后返回。
2.5 电流及电压环控制模块
三相异步电动机进线电流的反馈量是晶闸管软起动系统非常重要的一项反馈信息,其电流反馈当中的闭环模块也作为了电流作为反馈量的闭环系统软件的实现。
通常将电流作为反馈量的闭环系统在选择起动方式时大致分为以下三种:第一,恒流起动;第二,电流斜坡起动;第三,电动突跳起动。这三种起动方式当中,最为常用的起动方便则是恒流起动,此种起动方式的起动效果相对比较稳定,此方式的起动过程为,首先通过显示器将恒流起动设定为起动方式,再对起动电流时的恒流值进行设定,当程序接收到此项设定值以后,会计算出起动曲线,再计算出经A/D采样、计算得出电流的反馈值,然后将电动反馈值与起动曲线进行比较,当其经过PI调节之后将会得到晶闸管的触发角,即触发脉冲延时的时间,再将此脉冲直接发送到触发系统,对晶闸管阀形成驱动作用。
2.6 脉冲延时模块
该模块主要的作用便是当起动曲线与反馈量在PID控制这一模块经过时产生晶闸管触发角,即当脉冲延时时间以后,可以将此延时时间为晶闸管阀当中的各个晶闸管进行分配。
2.7 软停模块
当三相异步电动机需要运行停止时,可运用软停车,能够起到与软起动相同的重要作用。软停参数、停止时间以及停止方式可以通过显示器来进行选择。根据停止时间能够准确断定各种不同停止方式的停止曲线,其停止方式可选择闭环电流控制软停与开环电压控制软停;软停方式还也可以选择离散分频,此种软停方式与采用离散分频的起动过程正好相反,分频级别由工频开始,经过25Hz, 16.7Hz, 12.5Hz, 7.1Hz和3.85Hz的频率级别后机端电压逐渐降为零,电机停止运行。
3 结束语
本文通过对三相异步电动机应用软起动技术,采用对晶闸管相位控制的方法,设计了晶闸管软起动控制器的软件系统,详细给出了软起动器的主程序流程以及各主要中斷程序流程设计过程和结果,并对主程序流程以及各主要中断程序流程和原理进行了详细的介绍,通过电动机接线端子上的电压可灵活整定为气动值上升至电网电压使起动电流与初始转矩可以同传动装置的实际需要更好的适应。
参考文献:
[1]高永生.三相异步电机的软起动控制系统[J].甘肃科技,2005, 21(08):100-101.
[2]何报杏.中压异步电动机的软起动[J].电气时代.2002(06):53-54.
作者简介:杨铭(1982-),女,吉林长春人,讲师,研究方向:计算机科学与技术。