基于STM8S的直流无刷电机控制系统的设计
2014-10-20张俊贺殳国华李永鹤
张俊贺, 殳国华, 李永鹤
(上海交通大学电子信息与电气工程学院,上海 200240)
0 引言
直流无刷电机(BLDC motor)既有交流电动机的结构简单、运行可靠、维护方便等优点,又有直流电动机运行效率高,调速特性好等优势,并且由于没有机械换相的限制,容易做到小型化、重量轻、高转速等特性,因此,在近年来直流无刷电机得到了广泛应用。直流无刷电机调速系统是一种典型的机电一体化产品,它是由电动机本体,转子位置检测器、逆变器和控制器组成的自同步电动机系统[1,2]。其中,位置传感器检测转子位置信号,控制器对位置信号进行处理并发出相应的换相命令,由逆变器执行,从而带动电动机旋转。
在直流无刷电机调速系统中,转子位置检测器有两种方法:有位置传感器式和无位置传感器式[3]。其中有位置传感器式常用的有霍尔位置传感器和光码盘,虽然位置传感器有很多优点,但是它们的存在也不可避免地增加了无刷直流电机控制系统的体积及成本,所以在一些体积、重量或成本比较敏感的设计中,无位置传感器式无刷直流电机调速系统得到了普遍的应用。常用的无位置传感器式位置检测方法主要有反电动势检测法、续流二极管工作状态检测法、三次谐波检测法等。在文献[4]中提出了一种利用线电压来实时计算反电动势的无刷直流电机转子位置辨识方法,该方法虽然结构简单,不需要构造电机中点、不需要反电动势过零硬件检测和深度滤波电路,但是该方法需要对线电压进行实时处理,并进行大量运算,这需要数字信号处理(DSP)芯片才能实现,而采用DSP芯片将会极大增加系统的成本。目前,反电动势过零检测法是无刷直流电机转子位置估算的主要方法[5-8],传统的反电动势法大都采用端电压与构造的电机中点来间接得到反电动势过零信号,一般采用硬件电路实现[9]。在本文中,采用已经得到广泛应用比较成熟的反电动势检测法作为转子位置的检测方法。
1 直流无刷电机的运行分析
直流无刷电机调速电路图如图1所示,在图1中,上桥臂三个开关管 Q1、Q3、Q5采用 P沟道功率MOSFET,栅极电位低电平时导通;Q2、Q4、Q6采用 N沟道功率MOSFET,栅极电位高电平时导通,A、B、C为电机三相绕组。在图1中,在由微控制器组成的控制系统的控制下,同一桥臂的上、下两个开关管不能同时导通,通过控制开关管Q1~Q6中的两个按照一定顺序轮流导通,电机电枢同时有两相通电,当按表1所示顺序轮流导通一周时,电机就旋转一周,电机的此种导通方式被称为三相六状态通电方式[10,11]。需要注意的是,同一桥臂上下两个开关管必须保留足够的死区时间。

图1 三相桥式逆变电路
2 控制系统设计
2.1 系统控制策略
根据直流无刷电机的运行原理,本文中所设计的直流无刷调速系统采用两相导通星形三相六状态方式,按照不同的导通次序可实现电机的正转、反转及刹车功能。本控制系统中,速度调制采用电流环和速度环双闭环调速,调速系统原理图如图2所示。速度环为外环,电流环为内环,速度调节器和电流调节器均采用PID算法实现。在速度环中,将速度给定信号n*与速度反馈信号n作为速度调节器的输入,速度调节器的输出用作电流参考信号i*,与电流反馈信号一起作为输入送到电流调节器,而电流调节器的输出将作为PWM发生器的信号,用以控制输出PWM信号的占空比,再通过逆变器对电机进行调速。需要说明的是,上述电流内环所调节的其实就是电磁转矩,除此之外,它还有过流保护等作用。

表1 开关管导通与电枢通电之间的关系

图2 直流无刷电机调速系统原理图
2.2 硬件设计
直流无刷调速系统包括控制模块、检测模块、通讯模块及全桥逆变模块。其中,控制模块、检测模块以及通讯模块可以由一个微控制器实现,在本调速系统中,采用目前非常流行的性价比较高的STM8S系列芯片作为本调速系统的微控制器芯片。STM8S系列微控制器是意法半导体公司采用130 nm技术,具有先进的核架构,在24 MHz主频时,指令执行速度高达20 MIPS,除此之外,该系列微控制器内嵌有RC振荡器、EEPROM、flash以及完善的外设[12]。该系列微控制器稳定性和可靠性都非常高,运算速度极快,完全可以实现PID算法的复杂计算。全桥逆变模块由三支桥臂组成,如图1所示。每一支桥臂均由1只N沟道MOS管和1只P沟道MOS管组成,其中,P沟道MOS管作为上桥臂,即图1中的Q1、Q3、Q5;N沟道MOS管作为下桥臂,即图1中的Q2、Q4、Q6。在本调速系统中,N沟道MOS管我们采用FDS8880,P沟道MOS管我们采用的是FDS6675。逆变模块直流侧电压直接由直流电源供电。总体系统架构图如图3所示。
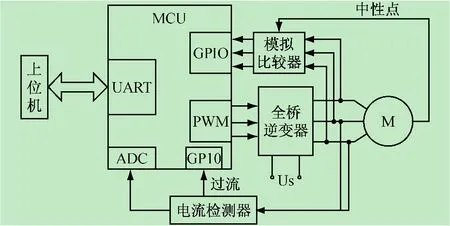
图3 控制模块系统架构图
需要注意的是,由于我们采用的是三相六状态通电方式,所以直流无刷电机在正常工作时每时每刻只有两相通电,余下的第三相我们称之为悬空相。反电动势过零检测转子位置的方案,就是通过比较悬空相和中性点的电压值来决定电机换相的时刻[13~15]。在图3中,我们用模拟比较器LM339来达到这一目的。
2.3 软件设计
在软件设计中,要合理利用微控制器的外设,在不影响实时性的情况下尽量多地对电流进行采样,从而达到实时过流保护的目的。在此前提下,还要实现微控制器通过UART与上位机的通信,为了防止通信受到干扰造成的微控制器误动作,同时也为实现一台上位机能控制多台控制器,我们还设计了简单的基于RS232协议的增强通信协议,如图4所示。
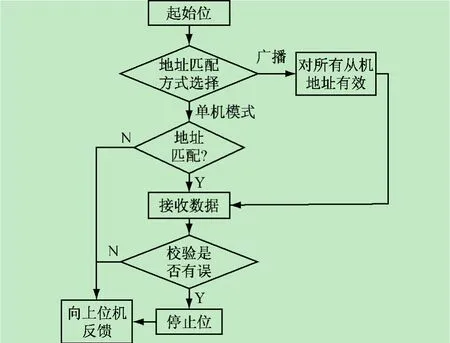
图4 基于RS232的增强通信协议框图
本调速系统是一个实时控制系统,为了达到实时性,必须充分利用微控制器强大的中断处理能力:通过与模拟比较器输出脚相连接的GPIO引脚中断,确定换相时刻并进行换相处理,我们称之为换相中断;上位机请求数据,通过UART中断并完成收发数据的任务,称之为串口中断;通过ADC转换完成中断,实时检测电流信息并进行处理,称之为ADC中断;通过电流检测器的过流信息产生GPIO中断,可以做到实时保护,称之为过流中断。在所有的这些中断中,过流中断优先级最高,其次为换相中断,再次为ADC中断,最后为串口中断。而main()函数主要负责系统初始化,根据串口通信协议判断需要执行的命令,计算电机转速,实现闭环控制以及在等待中断的时候触发电流采样。
特别要住的是,由于本调速系统采用的是无位置传感器直流无刷电机,在启动的时候转速较小,难以检测到符合要求的反电动势信号,因此,无法得到正确的换相信息。为了能够正常启动,采用三段式启动方法实现电动机转子定位、步进启动直到正常运行[16-17]。
3 试验分析
根据以上方案,设计了图5所示无位置传感器式直流无刷电机调速系统。

图5 基于STM8S的直流无刷电机控制系统
基于以上直流无刷电机调速系统,采用新西达2212三相永磁无刷电机作为被控对象,由以上控制系统分别连接上位机与该型号电机进行联合实验,实验模块图如图6所示。
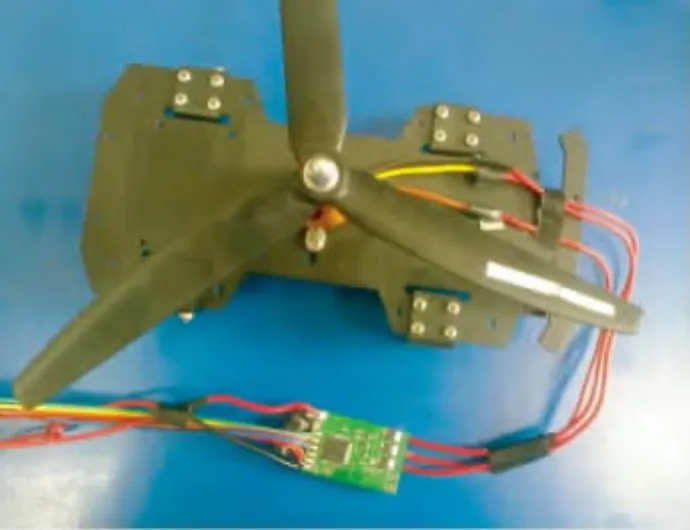
图6 直流无刷电机控制系统实验图
对图5所示的直流无刷电机调速系统进行试验,得到的启动波形如图7所示。
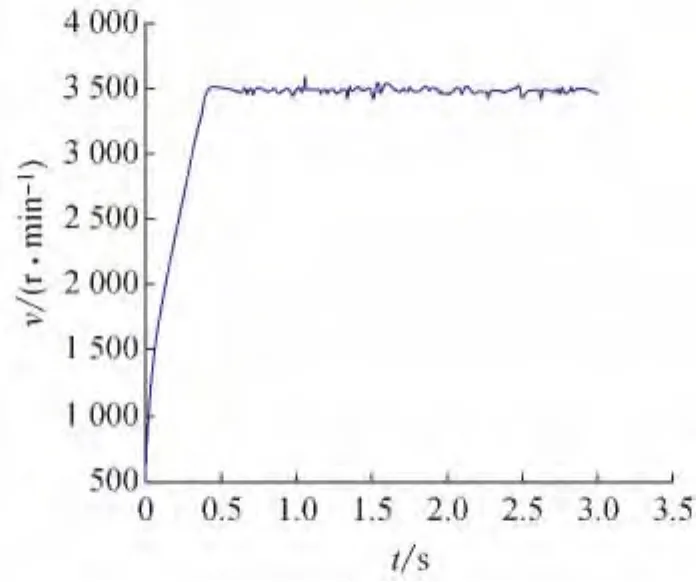
图7 电机启动转速-时间波形图
4 结语
本控制系统已成功实现对新西达2212电机的空载及带载(风机)试验,能成功执行上位机发送的调速命令,实现电机闭环调速。本直流无刷电机控制系统调速效果好,动态响应快,体积小,重量轻,成本低,非常适合于航模等自控性能要求较高的场合,具有广泛的应用空间及市场空间。
[1] 孙建忠,白凤仙.特种电机及其控制[M].北京:中国水利水电出版社,2005:6-14.
[2] 陈玉荣,倪光正.直流无刷电机电流检测技术的研究[J].农机化研究,2004(1):106-108.CHEN Yu-rong,NI Guang-zheng.Research on Current Measurement Technique of Brushless DC Motor[J].Journal of Agricultural Mechanization Research,2004(1):106-108.
[3] 贾桂丽.基于ST7的直流无刷电机控制系统设计与实现[D].哈尔滨:哈尔滨工程大学,2008:6-8.
[4] 李自成,程善美,蔡 凯,等.反电动势过零检测无刷直流电机转子位置新方法[J].电工技术学报,2009,24(7):52-58.LI Zi-cheng,CHENG Shan-mei,CAI Kai. A Novel Scheme of Sensing Rotor Position of BLDCM Based on the Zero-Crossing of Back EMF[J].Transactions of China Electrotechnical Society,2009,24(7):52-58.
[5] Su G J,Mckeever J W.Low-cost sensorless control of brushless dc motors with improved speed range[J].IEEE Transactions on Power Electronics,2004,19(2):296-302.
[6] 张 磊,瞿文龙,陆海峰,等.一种新颖的无刷直流电机无位置传感器控制系统[J].电工技术学报,2006,21(10):26-30.ZHANG Lei,QU Wen-long,LU Hai-feng,et al.A Novel Sensorless Control System of Brushless DC Motors[J].Transactions of China Electrotechnical Society,2006,21(10):26-30.
[7] 陈海滨,殳国华.四旋翼飞行器的设计[J].实验室研究与探索,2013,32(3):41-44.CHEN Hai-bin,SHU Guo-hua.Design of a Four-rotor Aircraft[J].Research and Exploration In Laboratory,2013,32(3):41-44.
[8] 薛晓明,杨 翀.一种统一的无刷直流电机直接反电动势法[J].电工技术学报,2010,25(9):62-68.XUE Xiao-ming,YANG Chong.A Unified Approach to Direct Back EMF Detection for Brushless DC Motor[J].Transactions of China Electrotechnical Society,2010,25(9):62-68.
[9] Chen Kuangyao,Tzou Yingyu.Design of a sensorless commutation IC for BLDC motors[J].IEEE Transactions on Power Electronics,2003,18(6):1365-1375.
[10] 张 琛.直流无刷电动机原理及应用[M].2版.北京:机械工业出版社,2004.
[11] 刘 军,李金飞,俞金寿.无刷直流伺服电机四象限运行分析[J].上海交通大学学报,2009,43(12):1910-1915.LIU Jun,LI Jin-fei,YU Jin-shou.Analysis on 4-Quadrant Operation of Brushless DC Servo System[J].Journal of Shanghai Jiaotong University,2009,43(12):1910-1915.
[12] 陈 雄.以STM8S208单片机为主控的编程器的设计与实现[D].武汉:武汉工业学院,2012:11-14.
[13] 崔 丽,叶先明.基于AVR单片机的直流无刷电机智能控制系统设计[J].仪表技术与传感器,2009(11):34-36.CUI Li,YE Xian-ming.Design of BLDCM Intelligent Control System Based on AVR Single-chip Microcomputer[J]. Instrument Technique and Sensor,2009(11):34-36.
[14] 刘伯扬.基于dsPIC30F2010微处理器的无位置传感器直流无刷电机控制系统[D].南京:南京航空航天大学,2010.
[15] 颜廷玉.直流无刷电机控制系统的设计与研究[D].哈尔滨:哈尔滨工业大学,2009.
[16] 林东轩.直流无刷电机无传感器启动方法研究[D].广州:华南理工大学,2012:29-48.
[17] 朱俊杰,粟 梅,王湘中,等.无位置传感器无刷直流电机闭环三段式启动策略[J].仪器仪表学报,2013,34(1):173-179.ZHU Jun-jie,SU Mei,WANG Xiang-zhong,et al.Closed-loop 3-step start-up strategy for brushless DC motor without position sensor[J].Chinese Journal of Scientific Instrument,2013,34(1):173-179.
