基于Carsim和Simulink仿真的车辆模糊巡航控制器
2014-10-15高骁猛应毅辰王晓年
高骁猛,应毅辰,朱 劲,王晓年
(同济大学电子与信息工程学院,上海 201804)
0 引言
智能车辆俗称无人驾驶汽车,是移动机器人的一种。它是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。除了特殊潜在的军用价值外,还因其在公路交通运输中的应用前景受到西方国家的普遍关注。一些发达国家已相继将智能车辆的研究纳入本国重点开发的“智能运输系统”和“智能车辆系统”的重要组成部分[1]。
汽车作为一种现代化交通工具改善了人们的生活,促进了社会的发展,但同时也造成了诸如交通事故、道路阻塞等严重社会问题。无人驾驶技术被认为可在相当程度上减少因驾驶员精神和体力因素引起的交通事故,加强车辆行为的可预测性,提高道路的利用效率。
无人车作为现代化战争的新概念、汽车技术发展的新方向和科学研究的综合验证平台,一直倍受国防工业、汽车工业和高校与科研机构的关注[2-7]。
模糊控制与传统控制的根本不同在于模糊控制不需要知道被控对象精确的数学模型,因此可以有效地克服对象数学模型建立上所遇到的非线性、时变性、滞后性等问题[7]。
1 无人车纵向运动模型

图1 车辆纵向动力示意图
车辆在运动过程中,影响车辆的外部纵向力包括空气阻力、重力、轮胎纵向力和滚动阻力,车辆纵向受力情况如图1所示[6]。
首先基于发动机MAP图,根据节气门开度以及发动机转速查表得到发动机稳态扭矩,并通过一阶惯性环节得到发动机的输出扭矩。变速器根据节气门开度和当前车速得到变速比,并通过主减速器后得到传动系统速比。发动机输出扭矩经过液力变速器以及传动系统减速后,转化为车辆的驱动力,制动压力通过制动系统比例系数转化为制动力[3,8]。
沿车辆纵向x轴方向力平衡方程式为[3]:

式(1)中,Fx为发动机驱动力;Faero为纵向空气阻力;Fr为轮胎滚动阻力;m为车辆质量;g为重力加速度;θ为车辆行驶坡度。
作用在车辆上的当量空气阻力可以表述为:

式(2)中,ρ为空气密度,名义值为1.225kg/m3;Cd为空气阻力系数,名义值为0.3;AF为迎风面积,名义值为1.2m2;Vx为车辆纵向行驶速度;Vwind为风速(头部迎风为正,尾部迎风为负)。
车辆轮胎滚动阻力可表示为:

式(3)中,Cr为车轮滚动阻力系数,名义值为0.015。
2 纵向模糊控制器设计
相关研究表明,对车辆的纵向和横向进行独立控制可获得满意的效果,一次纵向运动可不考虑横向运动的影响[9]。通过模糊控制,神经网络控制等智能控制方法,对车辆纵向运动控制取得了较好的效果[10]。目前,巡航模糊控制器主要是将速度误差E及速度误差变化率Ev作为模糊控制器的输入,来进行车辆自动巡航的控制,但没有考虑当前方出现车辆时保证安全行驶的无人车跟车进行距离控制情况,本文将针对这种情况进行改进。
2.1 模糊控制器结构设计
模糊系统主要由4个模块组成:输入模糊化模块、模糊规则库模块、模糊推理机模块、输出去模糊化模块[11]。模糊控制流程如图2所示。
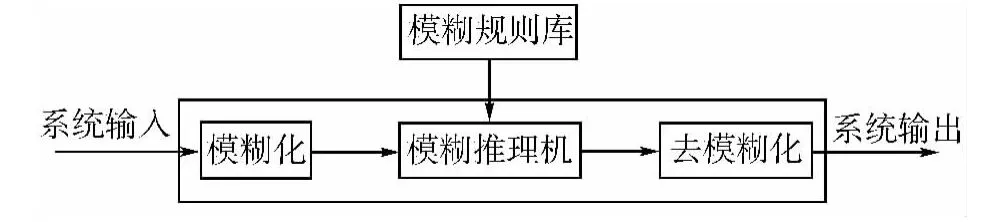
图2 模糊控制流程图
为满足实际需要,本文采用四变量作为纵向模糊控制系统的输入语言。输入输出语言采用高斯型隶属度函数,其隶属度函数表达式为:

式(4)中,c决定函数中心的位置;σ决定函数曲线的宽度。
对于模糊规则库模块,本文选择Mamdani模糊控制器,模糊控制规则通过分析驾驶员行为及总结几种经典的驾驶操作来获得规则。Mamdani模糊控制器是最常见的控制器,输入输出语言均采用模糊集合表示,模糊规则的形式为[12-13]:

其中,Ri为第i条规则;n为规则总数;xk(k=1,2,…,m)为模糊控制系统的输入变量;(j=1,2,…,m)表示在第i条规则中,第j个输入变量所在的模糊集合;Bi表示在第i条规则中,输出变量所在的模糊集合;y为模糊规则的结论。if语句对应的部分称为前件部分,then语句对应的部分称为后件部分,也即结论部分。
对于模糊推理模块,本文使用Mamdani最大最小化推理规则进行模糊推理,Mamdani最大最小化推理原则为:
(1)输入变量之间的and运算采用取小min算子;
(2)不同规则之间的or运算采用取大max算子。
解模糊的过程是模糊化的反过程,本文采用重心法解模糊化[14]。

式(5)中,yout表示模糊输出结论;ωi表示 y∈Bi的强度。
2.2 模糊控制器参数设计
本文设计的模糊控制器由4个输入作为输入变量,分别为速度误差 Ev、加速度 Acc、车间时距误差ETimeGap和车间时距变化率DTGt。车间时距为本车以当前车速可能撞上前车所花费的时间。若只依靠距离,难以反映两车间的安全程度,在同样的距离下,后车如果速度过快,将更容易同前车发生碰撞。而车间时距变化率是反映两车接近或分离的快慢程度,是反映两车接近程度的另一个指标。
4个输入量分别见式(6)~式(9):
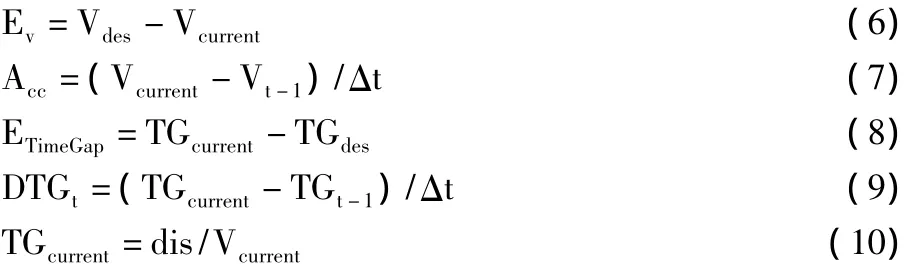
式(6)~式(10)中:Ev为速度误差;Vdes为本车期望车速;Vcurrent为本车当前车速;Acc为本车加速度;Vt-1为上一时刻本车车速;ETimeGap为车间时距误差;TGcurrent为当前车间时距;TGdes为期望车间时距;DTGt为车间时距变化率;TGt-1为上一时刻车间时距;dis为两车之间距离。
将无人车速度变化和加速度论域划分为5个子集,选择高斯型隶属度函数类型。为了便于理解和设计控制器,车间时距和车间时距变化率仅选择2个语言变量,当车间时距误差为负的时,表明两车有碰撞危险,因此表明两车距离远的模糊子集FAR的三角形隶属度函数的斜率应尽可能大,使隶属度函数尽快衰减,目的是使控制器能对微小的负车间时距误差非常敏感。隶属度函数的图像如图3至图6所示。
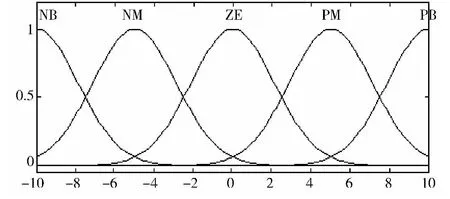
图3 速度误差隶属度函数
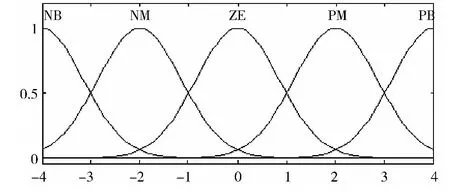
图4 加速度隶属度函数

图5 车间时距隶属度函数
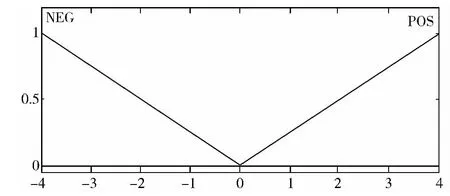
图6 车间时距导数隶属度函数
系统的输出为节气门踏板位置增量命令,以Positioninc表示,同样将论域划分为5个语言值,选用高斯型隶属度函数。
2.3 模糊控制器规则设计
对于无人车的定速巡航,仅需考虑期望车速与当前车速信息。根据驾驶经验可总结出下述控制规则并考虑当踏板位置增量为ZE时,表明控制器对踏板不进行操作,属于冗余规则,结合实际的驾驶经验,考虑速度误差与加速度之间的关系,可将控制规则进行简化,将规则由原来的25条简化为18条。表1为简化的速度控制模糊规则表。
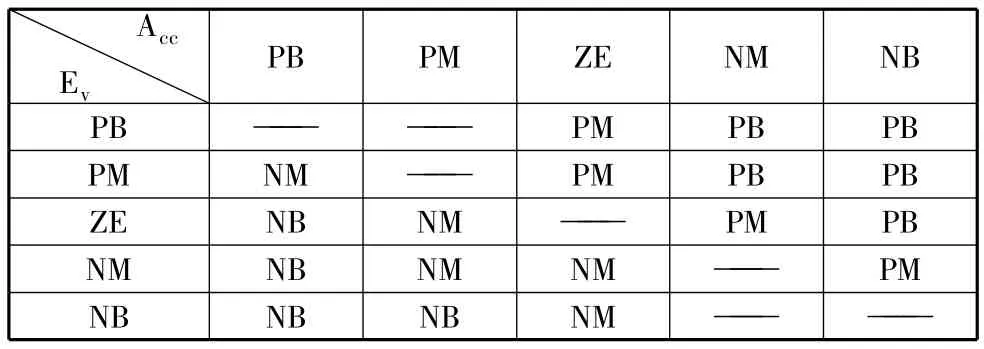
表1 简化的速度控制模糊规则表
当无人车检测到前方出现行驶车辆时,车辆进入距离行驶状态,控制策略转为维持安全的车间时距。此时输入语言变量变为加速度,车间时距及车间时距变化率。由于期望速度对车间时距的控制作用很小,故不予考虑。通过完全遍历法可得到2×2×5=20条规则,结合实际驾驶经验对规则进行优化:
车间时距误差为NEAR,表明同前车(障碍)小于安全距离,如果车间时距变化率为POS,说明两车正在分离,此时仅需降低高的加速度;而如果车间时距变化率为NEG,两车正不断接近,有碰撞危险,必须抬起节气门踏板,降低加速度。
车间时距误差为FAR,表明车辆同前车间距离较为安全,如果车间时距变化率为POS时,两车正在分离,较为安全,控制系统转为对速度的控制;如果车间时距变化率为NEG,两车正不断接近,降低车辆正向加速度。
经过分析后,将完全遍历法得到的20条规则简化为9条规则。简化后的模糊规则见表2。
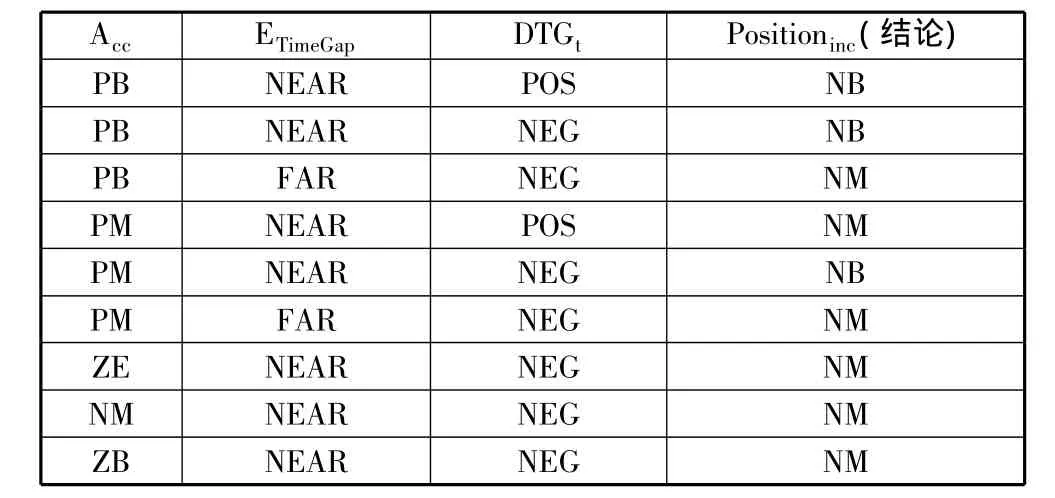
表2 简化的距离控制模糊规则表
通过将模糊控制规则与人驾驶经验结合可有效地剔除冗余规则,而且使控制器更接近于人类驾车行为。
3 仿真实验结果与分析
本文通过Carsim与Matlab的联合仿真进行实验结果的仿真。Carsim是专门针对车辆动力学的仿真软件,Carsim模型在计算机上运行的速度比实时快3~6倍,可以仿真车辆对驾驶员、路面及空气动力学输入的响应,主要用来预测和仿真汽车整车的操纵稳定性、制动性、平顺性、动力性和经济性,同时被广泛地应用于现代汽车控制系统的开发。通过Carsim与Simulink的联合仿真能有效地验证算法的实用性和有效性。本实验仿真结构图如图7所示。

图7 Carsim与Simulink联合仿真结构图
(1)速度控制工况。
本节分别将无人车巡航速度设置为40km/h的低速行驶状态和90km/h的高速行驶状态,仿真结果见图8和图9。通过对仿真结果曲线分析可知,本实验的模糊控制响应时间短,系统超调量小,具有良好的稳定性,能够有效地控制无人车快速稳定地以预瞄速度行驶。

图8 预瞄速度为40km/h的仿真结果
(2)距离控制工况。
ACC汽车处于45km/h的速度行驶状态,当其行驶至与前车相对距离S=30m时,此时前车速度为40km/h,ACC汽车与前车存在相撞危险,模糊控制器转入距离控制状态,控制车辆减速;当ACC汽车减速至与前车车速相同时,若目前两车车距大于安全距离并处于合理车距区间则跟随前车。仿真结果见图10和图11,可以看到,在速度调整过程中,t=4s时两车间距最小情况仍然处于安全刹车距离内,调整结束后,两车速度趋于相等,两车距离趋近于安全距离。

图10 ACC跟车速度仿真结果
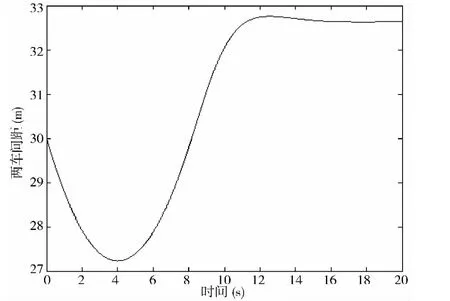
图11 ACC跟车距离仿真结果
4 结束语
本文设计结合真实驾驶员操纵情况下对汽车纵向控制行为的模糊控制器,加入对前车安全距离控制的设计,建立能进行速度控制和安全距离控制的模糊控制器。通过Carsim仿真软件与Simulink的结合对算法进行了仿真验证,表明该算法能有效地进行车辆ACC巡航工况的自动控制,能高效地实现无人车纵向速度的控制。
[1]Darbha Swaroop,Rajagopal K R.Intelligent Cruise Control Systems and Traffic Flow Stability[R].California PATH Research Report,UCB-ITS-PRR-98-36,Texas A&M University,1998.
[2]于万海.汽车定速巡航控制系统应用及发展趋势[J].汽车与配件,2012(1):20-21.
[3]付百学,马彪,潘旭峰.现代汽车电子技术[M].北京:北京理工大学出版社,2008:68-119.
[3]Rajamani R.车辆动力学及控制[M].北京:机械工业出版社,2010.
[4]Noguchi N,Will J,Reid J,et al.Development of a master-slave robot system for farm operations[J].Computer and Electronics in Agriculture,2004,44(1):1-19.
[5]王立新,王迎军.模糊系统和模糊控制[M].北京:清华大学出版社,2003:120-165.
[6][德]威鲁麦特.车辆动力学模拟及其方法[M].北京:北京理工大学出版社,1998.
[7]王士同.模糊系统、模糊神经网络及应用程序设计[M].上海:上海科学技术文献出版社,1998.
[8]张景波,刘昭度,齐志权,等.汽车自适应巡航控制系统的发展[J].车辆与动力技术,2003(2):44-49.
[9]Ioannou P A,Chien C C.Autonomous intelligent cruise control[J].IEEE Transactions on Vehicular Technology,1993,42(4):657-672.
[10]高振海,朱永强,田雷.汽车自适应巡航系统的模糊自校正控制算法[C]//中国汽车工程学会汽车电子技术分会第七届(2006)年会暨学术研讨会论文集.2006:29-33.
[11]李士勇.模糊控制和智能控制及应用[M].哈尔滨:哈尔滨工业大学出版社,1990.
[12]Mamdani E H.Applications of fuzzy algorithms for control of simple dynamic plant[J].Procedings of IEEE,1974,121(12):1585-1588.
[13]张化光,何希勤,等.模糊自适应控制理论及其应用[M].北京:北京航空航天大学出版社,2002.
[14]Lee C C.Fuzzy logic in control system:Fuzzy logic controller,Part I,II[J].IEEE Trans.System,Man,and Cybemetics,1990,20(2):404-434.
