凸轮式汽车线控制动系统控制器的设计
2014-10-15朱东阳张兴旺王舒阳
朱东阳 张兴旺 王舒阳
(南昌工程学院机械与电气工程学院,江西 南昌330099)
0 引言
汽车线控制动系统(Brake-By-Wire)是将传统的液压或气压制动执行元件改为电驱动元件,由电机来提供制动力的一种制动系统。由于其具有结构简单、质量轻、响应迅速、易于采用模块结构、易于进行改进与增加功能等诸多优点,现在已经成了汽车制动研究的热点[1-3]。电机线控制动控制器是汽车线控制动系统的重要组成部分。
本文针对所提出的一种凸轮式线控制动系统[4]设计了专门的制动控制器,并通过试验进行了测试,结果显示,该系统具有结构简单、响应速度快的特点,满足了线控制动系统的控制要求。
1 凸轮式线控制动系统控制器的硬件设计
凸轮楔块式汽车线控制动系统主要包含电子踏板模拟器、制动系统控制器、功率驱动电路和机械执行机构4部分,如图1所示。电子踏板模拟器把驾驶员踩踏制动踏板的力转化为制动信号,传递给制动系统控制器;制动系统控制器是整个系统的核心控制部分,接收各个传感器的信号,根据一定的算法对制动电机进行控制,并给电子踏板模拟器提供反馈信号;功率驱动电路主要为电机提供电流并对其进行保护;机械执行机构的主要功能是对制动电机进行减速增矩,并把产生的力矩作用到制动盘上产生制动力矩。
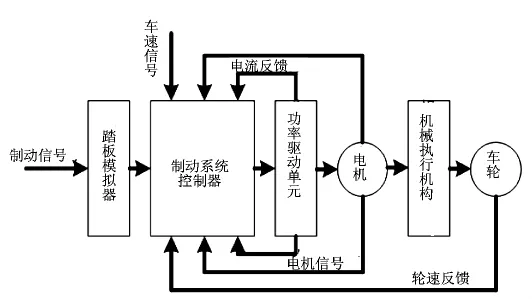
图1 制动系统框图
制动系统控制器硬件电路采用DSP芯片TMS320F2812作为控制核心,并采用专门为两相/四相步进电机设计的TB6560双全桥驱动芯片作为功率驱动芯片,实现对两相混合式步进电机的细分控制。
2 凸轮式线控制动系统控制器的软件设计
2.1 汽车动力学模型
汽车常用的车辆模型有一般车辆模型、四轮车辆模型、二轮车辆模型和单轮车辆模型。由于汽车是一个复杂的多自由度空间运动系统,若考虑所有的自由度,就必须列出相应数量的运动微分方程,使分析和求解变得极为困难,而且所需车辆参数较多,大多不易精确测量,可实现性差,实时控制精度不高。为了简化研究问题,根据所设计装置的具体要求,本文选用二自由度单轮车辆模型[5],并忽略空气阻力和车轮滚动阻力。二自由度单轮车辆动力学模型方程如下:

式中,m为车辆质量;v为行车速度;Fx为车轮摩擦力;J为车轮转动惯量;ω为车轮角速度;Tb为制动器制动力矩;R为车轮滚动半径;μ为车轮附着系数;Fz为地面的反作用力。
汽车力矩由刹车系统所产生的旋转力矩Te提供,可认为Tb=Te。
2.2 软件系统
按照线控制动系统工作原理,软件系统通过对踏板信号采样,汽车轮速采样,步进电机两相电流采样,控制系统采用双闭环结构,进行电制动联合控制。其中内环为电流环,通过电流调节控制制动器的输出转矩,实现制动力控制;外环为速度环,实现车轮速度控制。
3 试验结果及分析
所选用两相(A相和B相)步进电机,当开始刹车时,通电时序为从A相线圈的正输入端A+开始,经过B相线圈的负输入端B-,再经A相负输入端A-,最后是B相正输入端B+,电机正转实现制动刹车过程;当通电时序为A+、B+、A-、B-时电机反转,退出刹车过程。图2(a)所示为两相位驱动信号波形,二者呈正弦交替变化。如图2(b)所示,通过电流采样霍尔元件得到电机A、B两相绕组电流变化波形,电机两相绕组的电流按照正余弦规律变化,实现了均匀细分,电机运行稳定可靠。
4 结语
本文设计了基于凸轮式线控制动系统的制动控制器,控制器的运动控制模型采用了汽车单轮二自由度模型,控制软件采用双闭环结构,并以DSP芯片TMS320F2812为控制核心设计了以两相步进电机为执行机构的驱动控制电路。试验结果证明,驱动控制器具有响应速度快、控制精度高等优点,能够满足线控制动系统的设计要求。

图2 电机驱动信号与电流波形
[1]黄渊芳.电子机械制动系统(EMB)试验台的开发与应用研究[D].南京航空航天大学,2007
[2]曲万达.汽车线控制动系统之硬件系统研究[D].武汉理工大学,2006
[3]刘清河,孙泽昌.永磁直流电动机在汽车线控制动系统中的应用[J].微电机,2007,40(3)
[4]张兴旺,初长宝.基于Pro/E的电机线控制动器结构设计[J].南昌工程学院学报,2011,30(3)
[5]陈博,田广东.汽车线控制动的仿真与分析[J].上海工程技术大学学报,2010,24(3)
