基于单片机的汽车雨刷驱动装置
2014-10-13任龙辉仝秋红
任龙辉,仝秋红,肖 婵
(长安大学汽车学院,陕西 西安 710064)
随着经济的发展和人民生活水平的提高,人们对汽车使用的要求也越来越高。为了保证雨雪天气行车时驾驶员有良好的视线,在汽车风窗上装有刮水器。通过传动机构,刮水片在风窗玻璃外表面上往复摆动,以扫除风窗玻璃上的雨水、积雪或灰尘[1]。
传统的机械式雨刷驱动装置是由蜗杆、蜗轮、拉杆、摆杆等组成的传动四连杆机构[2-3],该装置的启动装置设在转向盘的右下侧,通过搬动手柄驱动,不仅占用一定的空间,而且启动时需要驾驶员的右手离开方向盘后再去操作手柄[4]。本文设计一款汽车雨刷驱动装置,启动装置的按钮设置在方向盘上,方便快捷启动,省时省力,并且此机构主要通过软件编程实现,只要有一定的动力源输入(如电源等)就会立即动作,实现应有的功能。
1 结构设计
基于单片机的汽车雨刷驱动装置主要包括预警单元、信息处理单元和执行单元。汽车雨刷驱动装置的整体电路如图1所示。
1.1 预警单元
预警单元是整个控制单元的主要组成部分,它为下一部分的信息处理单元接通动力源[5]。主要组成部分是1个变速按钮。变速按钮分低速挡、中速挡和高速挡3个挡位,驾驶员通过触摸转向盘上的变速按钮开关选择不同挡位实现变速,控制雨刷的工作速度[6-8]。
1.2 信息处理单元
信息处理单元主要由MC9S12XS128-LQFP112单片机和CD4011芯片组成,如图1所示,MC9S12XS128-LQFP112单片机通过引脚PB5(29)和PB7(31)与芯片CD4011相连,再与芯片IRF4905(2个)、IRF3205(2个)组成的P-N MOS管H桥相连。
MC9S12XS128-LQFP112单片机是S12XS系列下的一种芯片,其特点有:16位微处理器,112个引脚,片内振荡器、时钟电路和复位电路;30 MHz核心和总线速度128 KB闪存选项,带有纠错码(ECC)的4~8 KB的数据闪存;用于数据存储选择可配置的8、10或12位模数转换器(ADC),转换时间达到3 ms;支持控制局域网络(CAN)、局域互联网(LIN)和串行外设接口(SPI)协议;带有16位计数器的8信道计时器[9-11]。
CD4011有4个与非门路,共14个引脚,其功用是放大从单片机输出的电压。连接电路时CD4011的14脚接7.2 V,7 脚接地。
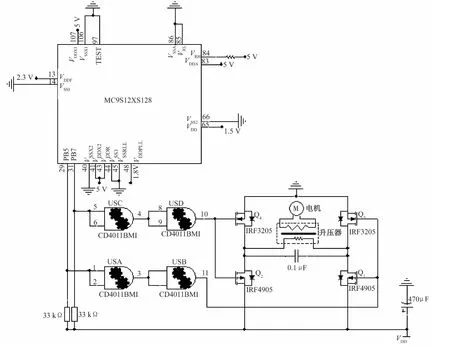
图1 整体电路图
1.3 执行单元
执行单元由P-N MOS管H桥和普通变压器组成,是整个控制单元的终了部分。如图1所示,整个系统经由H桥电路后,将交变电压(-12 V~+12 V)输送到电机上,经由电机输出轴直接驱动雨刷杆实现雨刷的左右摆动[12-13]。
P-N MOS管H桥电路控制电机的正反转,由2个P型场效应管Q1、Q2与2个N型场效应管Q3、Q4组成,故叫P-N MOS管H桥。桥臂上的4个场效应管相当于4个开关,P型管在栅极为低电平时导通,高电平时关闭;N型管在栅极为高电平时导通,低电平时关闭。场效应管是电压控制型元件,栅极通过的电流几乎为 0[14]。
如图2a)所示,在连接好电路后,控制臂1置高电平(U=VCC)、控制臂2置低电平(U=0)时,Q1、Q4关闭,Q2、Q3导通,电机左端为低电平,右端为高电平,所以电流沿箭头方向流动,设为电机正转。
如图2b)所示,控制臂1置低电平(U=0)、控制臂2置高电平(U=VCC)时,Q1、Q4导通,Q2、Q3关闭,电机左端为高电平,右端为低电平,所以电流沿箭头方向流动,设为电机反转。
当控制臂1、2均为低电平时,Q1、Q2导通,Q3、Q4关闭,电机两端均为高电平,电机不转;当控制臂1、2均为高电平时,Q1、Q2关闭,Q3、Q4导通,电机两端均为低电平,电机也不转。
图3为控制臂1、2和与非门CD4011组成的栅极驱动电路输出端。因为单片机输出电压为0~5 V,所使用的H桥的控制臂需要0 V或7.2 V电压才能使场效应管完全导通。PWM输入0 V或5 V电压时,栅极驱动电路输出电压为0 V或7.2 V,前提是CD4011电源电压为7.2 V。
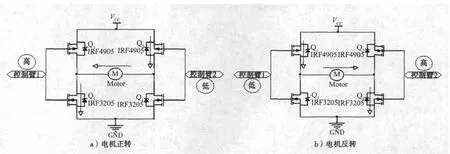
图2 H桥电路
H桥输出电压较小,不足以驱动电机带动雨刷工作,使用变压器将H桥输出电压放大到12 V,使电机的工作电压为-12 V~+12 V,实现电机的正反转[15]。
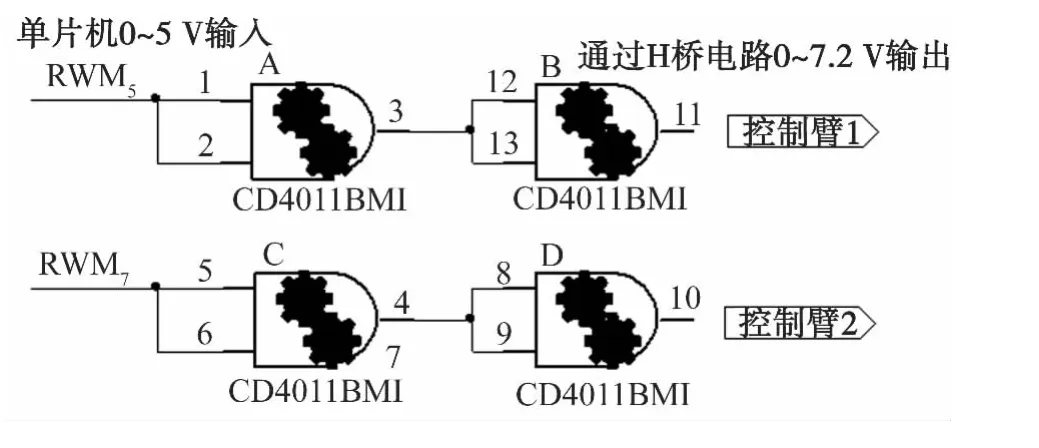
图3 CD4011栅极驱动电路
2 工作流程及实现过程
2.1 工作流程
基于单片机的汽车雨刷驱动装置的工作流程如图4所示。
驾驶员按下按钮,系统通电,程序初始化后,单片机上电,其上灯闪烁,此时向P-N MOS管H桥电路供电,由CD4011芯片通过引脚11和引脚10输出信号(高或低电平)输出小的正负电压,通过变压器将电压放大至雨刷电机所需要的工作电压(正负电压)。
电机输出轴直接连接雨刷器的支撑摆动轴,输出正负交替的电压可以实现支架随支撑轴的来回摆动。
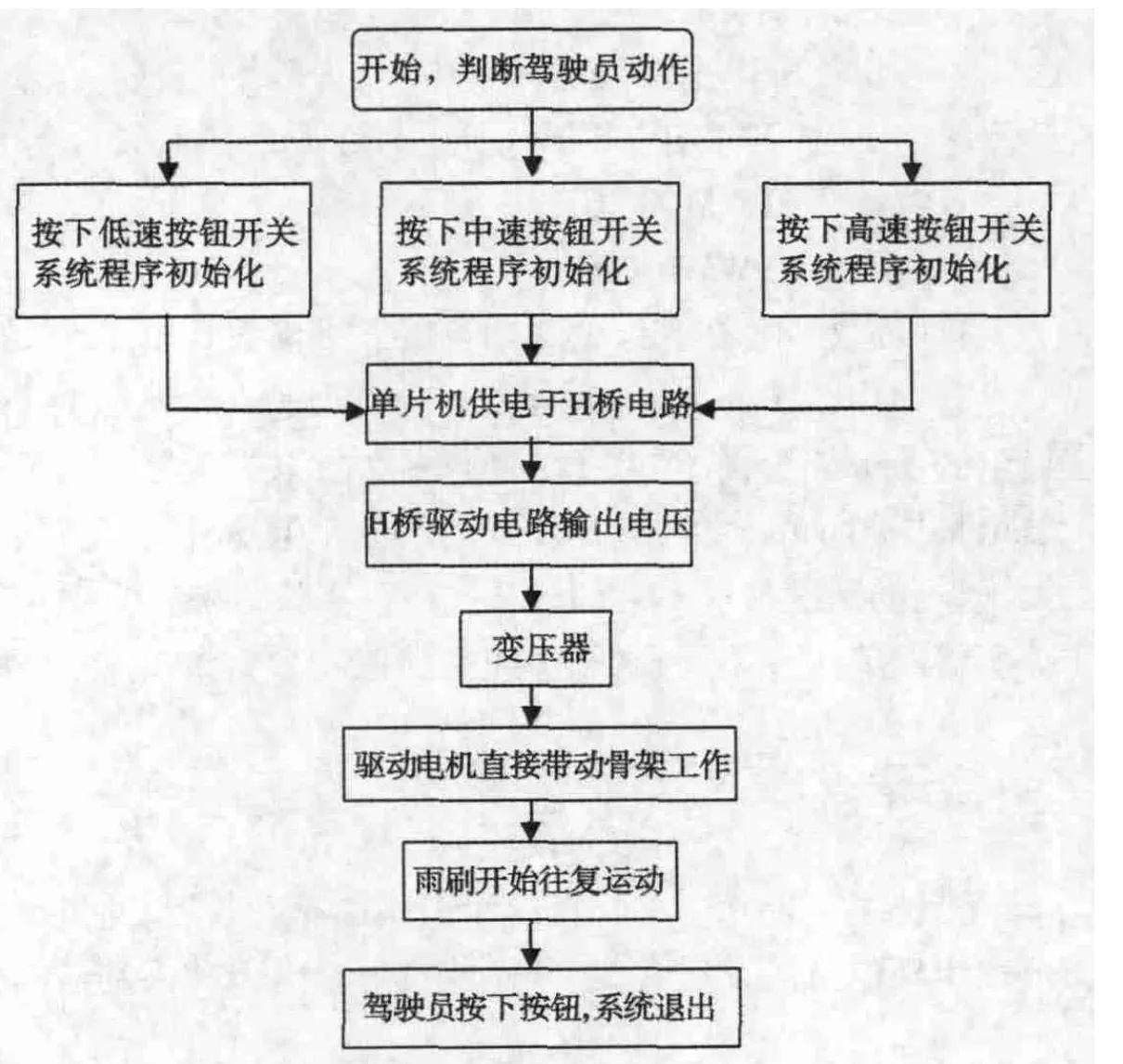
图4 工作流程图
2.2 工作速度的控制和调节
对整个装置的速度和工作频率的调节均通过软件程序来实现。
1)雨刷工作频率的调节程序
以低速挡为例[16-17]。
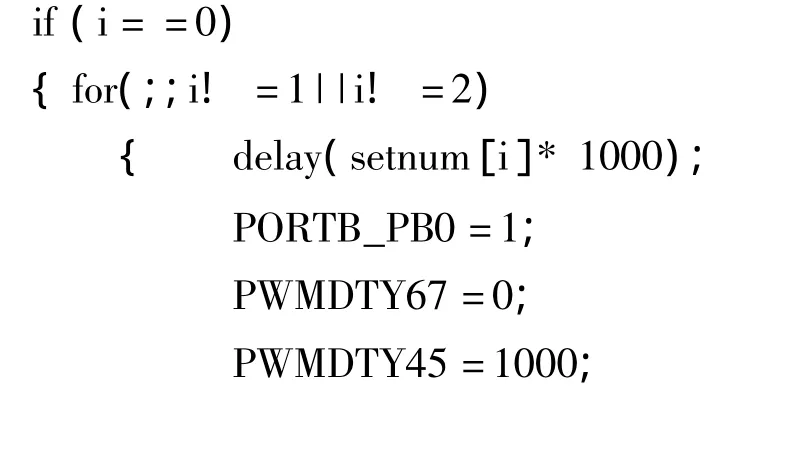
其中控制频率的函数就是delay()函数,可以设定setnum[i]的初始化值来决定雨刷的工作频率。这里设置3个变量i,结合图4,若驾驶员按下低速挡位按钮,设置i为0(中速挡位设为1,高速挡位设为2)则执行上述程序。程序中PORTB_PB0、PWMDTY45 2个参数控制电机正反转,若PORTB_PB0=1和PWMDTY45=1 000代表正转,则PORTB_PB0=0和PWMDTY45=0代表反转,正反转是相对的。
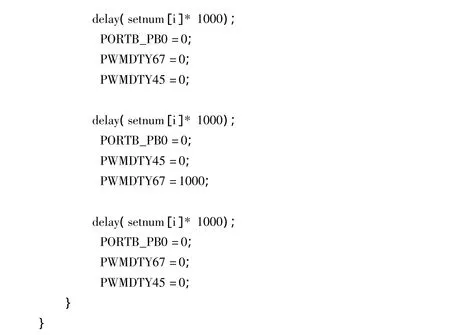
2)间歇周期实现程序
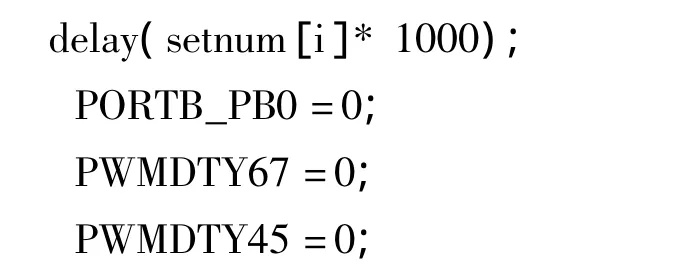
这时电机不转,其停歇时间可以通过函数delay()的参数控制实现。
程序用了3个if语句,分别对应3个速度。设定1个3挡按钮,分低速、中速和高速挡位,即事先所设定的setnum[i](i取0、1、2)值不同,所以3个挡位对应的雨刷的工作速度或是说工作频率不同,驾驶员可根据雨量的多少,选择合适的挡位。电动机由12 V直流电源驱动工作,由于受机械部件传动比的约束,雨刷的速度最快不会超过2次/s。实验结果表明:雨刷低速摆动速度约为1次/s,与经过延时函数计算所得的值相差不大;雨刷中速摆动速度为2次/s;雨刷高速摆动速度约为2~2.5次/s。
3 结语
设计了一种基于单片机的汽车雨刷驱动装置,通过单片机实现智能化控制。实验证明所设计的电路可以实现电机的正反转,工作性能良好。电机和雨刮器的机械连接及运行情况有待于进一步研究。
[1]陈家瑞.汽车构造(下册)[M].5版.北京:机械工业出版社,2011:6.
[2]毛峰.汽车电器设备与维修[M].北京:机械工业出版社,2005:5,182.
[3]关丹丹,那景新,李闯,等.一种前侧窗雨刷机构:中国,201320006792[P].2013 -01 -17.
[4]肖婵,任龙辉,周辉,等.汽车挡风玻璃表面雨刷器除霜器驱动控制装置:中国,201220668777[P].2012-12-06.
[5]舒华.汽车电器与电控技术[M].北京:机械工业出版社,2011:10,340-345.
[6]张双喜,王金洋,王秀梅.基于飞思卡尔单片机智能车的双线路径识别设计与实现[J].山东交通学院学报,2012,20(4):14-17.
[7]安鹏,马伟.S12单片机模块应用及程序调试[J].电子产品世界,2006(7):162-163.
[8]卓晴,黄开胜,邵贝贝.学做智能车:挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[9]张阳,吴晔,腾勤.MC9S12XS单片机原理及嵌入式系统开发[M].北京:电子工业出版社,2011:9,15-24.
[10]孙同景.Freescale 9S12十六位单片机原理及嵌入式开发技术[M].北京:机械工业出版社,2008.
[11]Motorola Inc.MC9S12DT128 Device User Guide[M/OL].(2010 -10)[2012 -04 -12].htpp://wenku.baidu.com/vie.
[12]梁景雨,李远彬,段艳妮,等.一种双电机驱动的智能车电子差速器控制[C]//长安大学研究生2011学术年会论文集.西安:长安大学,2012:121-124.
[13]陈修波,蒋德云,张志林,等.基于MC9S12XS128的无刷直流电机控制器设计[J].山东交通学院学报,2014,22(1):8-13.
[14]苗秋华,王鹏.客车空调智能控制系统的研制[J].山东交通学院学报,2006,14(3):17-20.
[15]秦曾煌.电工学[M].5版.北京:机械工业出版社,1999:24-35.
[16]李朝青.汽车单片机原理及接口技术[M].北京:北京航空航天大学出版社,1994.
[17]谭浩强.C 程序设计[M].3版.北京:清华大学出版社,2007:6.