车载多波束发射机自动测试系统的设计与开发
2014-10-13张薇
张 薇
(船舶重工集团公司723所,扬州225001)
0 引 言
在地空电子战干扰设备中,多波束发射机是重要组成部分之一。发射机要能产生出满足要求的干扰发射信号、达到有效干扰的目的,各项性能指标都要满足系统规定的要求。
多波束发射机是通过空间功率合成技术在规定的方向上产生高功率微波辐射,主要的技术参数体现在大功率方向图和有效辐射功率上。由于受场地距离尺寸的限制,这2项技术参数的测试往往无法在微波暗室完成,而是要在室外空旷的场地进行,现有的测试手段还无法完成这一测试任务。本文中设计的车载多波束发射机测试系统能对多波束发射机的大功率方向图、有效辐射功率等技术参数进行快速、准确的测试。目前该测试系统已应用到车载多波束发射机测试中,取得了预期的效果。
1 测试系统的设计原理
本系统采用全自动计算机管理,对被测多波束发射机的输入输出信号以及发射机方位信息进行全程管理和跟踪,将输入输出数据采集、处理,绘制成直观的多波束方向图,从而达到能自动测试多波束发射机大功率方向图和有效辐射功率的目的。
1.1 测试系统的硬件组成
为了实现对多波束发射机大功率方向图的测试,测试系统由以下硬件组成:计算机、信号源、伺服系统、打印机、接收天线、功率计。测试系统组成框图见图1。
其中作为服务器的主控计算机、信号源、打印机布置在车载作战舱室中,被测多波束发射机安置在舱室外伺服系统控制的转台上,此为发射端硬件配置。接收端配置了天线、功率计和作为客户端的计算机,负责接收传送发射端辐射的大功率信号。计 算机之间通过网线连接。
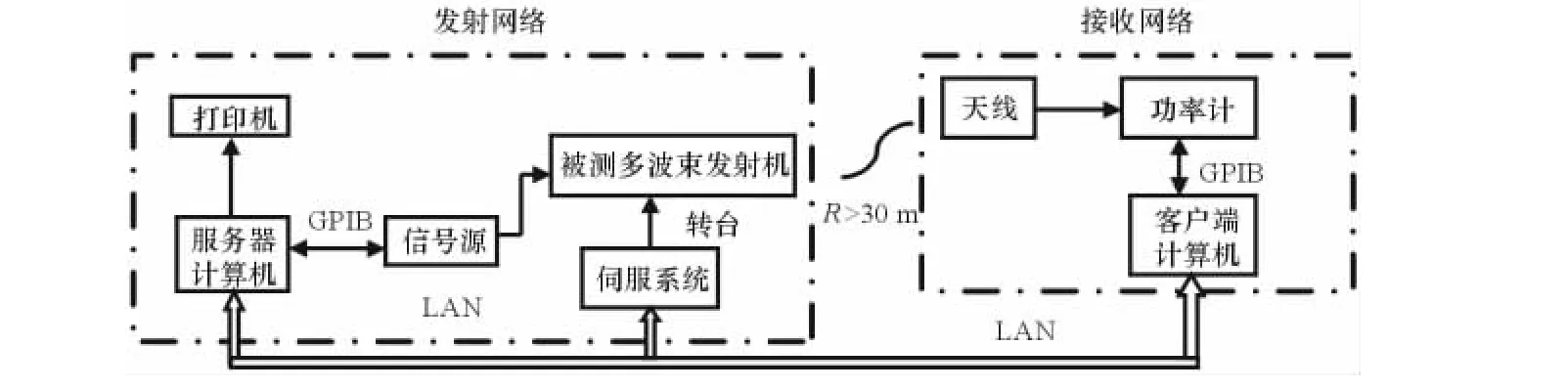
图1 测试系统原理框图
1.2 测试系统方案设计
在本测试系统中,计算机通过GPIB接口完成对信号源和功率计的输入输出控制,测试系统内2台计算机以及伺服系统之间的通信则通过组建局域网完成。
1.2.1 发射网络组建
发射网络主要完成对被测多波束发射机射频信号的管理,控制伺服系统转动转台,扫描辐射一定角度范围内的功率信号,收集接收网络传输过来的数据信息,依据输入输出数据以及角度信息之间的对应关系绘制大功率方向图。
发射网络的控制中心为担任服务器角色的主控计算机。它与发射网络内的其他组件控制关系如图2所示。

图2 发射网络
服务器计算机作为网络组建中的控者和听者,通过GPIB接口与信号源进行通讯。GPIB系统作为目前使用的标准化接口母线系统,可以使世界上不同厂家生产的仪器设备用统一的标准母线联接起来,消除了以往每次组建自动测试系统时都要设计一套专用接口的重复劳动。在本方案中,计算机控制信号源的频率范围、功率大小和频率步径,控制信号源开放与关闭信号的时间,从而达到能精确测量数据的目的。
其通过局域网与伺服系统进行通讯。由于局域网具有结构简单、数据传输率高、传输质量优良、兼容性和互操性良好等特点,笔者选择了组建局域网进行控制命令的下发执行,以及测试数据之间的传输和交换。计算机将被测多波束发射机当前的方位信息下发给伺服系统,伺服系统转动转台,带动被测多波束发射机变换水平方位角度,对当前角度的输出信号进行扫频测试。
打印机通过计算机通用接口并口传输方式将最终需要输出的数据进行打印,便于保存与查阅。
1.2.2 接收网络的组建
接收网络完成被测多波束发射机发射信号的接收工作,根据服务器计算机的要求,客户端计算机负责记录和传输接收功率信息,对当前的接收数据进行判别,以便能进行更精准的测量。接收网络组件关系如图3所示。

图3 接收网络
接收天线接收来自被测多波束发射机的射频信号,通过射频电缆传输到功率计中,当客户端计算机通过局域网接收到来自服务器的控制指令后,对功率计的当前数据进行多次录取,使用统计学方法剔除异常数据,将处理后的数据传送给服务器。
用统计学的方法处理可疑数据的基本思想是:给定一个置信概率,找出相应的置信区间,凡在这个置信区间以外的数据,就定为异常数据并予以剔除。在实际测量中常用算术平均值代替真值,用标准偏差估计值σ(x)代替标准偏差,凡测量值xi在区间[x-cσ(x),x+cσ(x)]以外的,即|xi-x|>cσ(x)时,就将数据xi剔除不用[1]。
1.3 工作流程
当被测多波束发射机完成顺序加电后,伺服系统调整发射机的发射方位,打开信号源的射频信号,将初始设定好频率、功率的射频信号通过射频电缆输出给被测发射机,发射机将该射频信号放大后,在距离发射机约几十米处的接收喇叭天线将辐射信号接收并通过射频电缆输入到功率计中。当处于客户端的计算机接收到来自服务器的“读功率”指令后,将当前的功率信息录入处理并传送到服务器端,继续等待下一指令的到来。服务器负责数据的整理、记录、图形绘制,具体工作流程如图4所示。
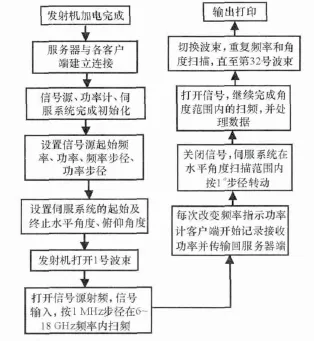
图4 工作流程
2 系统软件详细设计
多波束发射机测试系统软件是在Visual Basic(VB)6.0环境下开发的。VB提供了良好的人机对话界面,方便用户利用控件和模块加载功能进行程序的开发[2]。
为了实现在VB环境中对仪表的控制,必须利用VB中的模块加载功能,将专用控制仪表的通用类模块加载到工程设计中来。此模块包含了所有功能函数的声明,在对仪表的控制中直接调用某些函数进行编程,达到对仪表程控的目的。
在VB环境下,为了方便局域网的建立,VB提供了一个Winsock控件。它提供了访问传输控制协议(TCP)和用户数据报协议(UDP)网络服务的方便途径。为编写客户或服务器应用程序,不必了解TCP的细节或调用低级的Winsock APIs,通过创建服务器和客户端就可完成局域网内的数据交换。
软件分为两大部分:一是发射端控制软件;二是接收端控制软件。发射端软件完成服务器对伺服系统、信号源的控制及数据信息的处理和输出。接收端软件完成对服务器下发指令的接收和执行。
2.1 服务器控制软件设计
服务器控制软件分为三大功能:控制仪表,数据处理及显示,控制客户端的指令接收和反馈。发射机工作正常后,将发射机切换到1号波束,按照测试要求将信号源初始化,与作为客户端的伺服系统和控制功率计的计算机确立连接后,方可开始进行测试。测试过程中收集到的频率、功率等数据以图表的形式显示在计算机中,根据客户的要求不同显示不同的数据图表。图5为软件工作流程框图。

图5 服务器控制流程
2.2 接收端软件设计
接收端软件完成两大功能:接收服务器指令录入及处理数据,反馈数据信息。软件流程见图6。
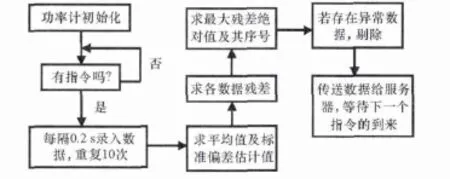
图6 接收端软件流程
2.3 测试软件界面
本软件需要用户对频率范围、频率步径、输入功率、角度范围、角度步径进行设置,根据用户对图形的要求修改显示界面,如图7所示。
3 应用软件测试及分析
车载多波束发射机测试系统完成设计及调试后,应用于某设备多波束发射机方向图的测试。在室外场地测试时,地面反射会影响发射机方向图的测试,经过多次试验,最终确定发射机与接收喇叭之间距离≥35m,接收喇叭垂直高度≥20m,发射机天线仰角设置≥20°,在这种测试条件下能消除地面反射所带来的测量误差。
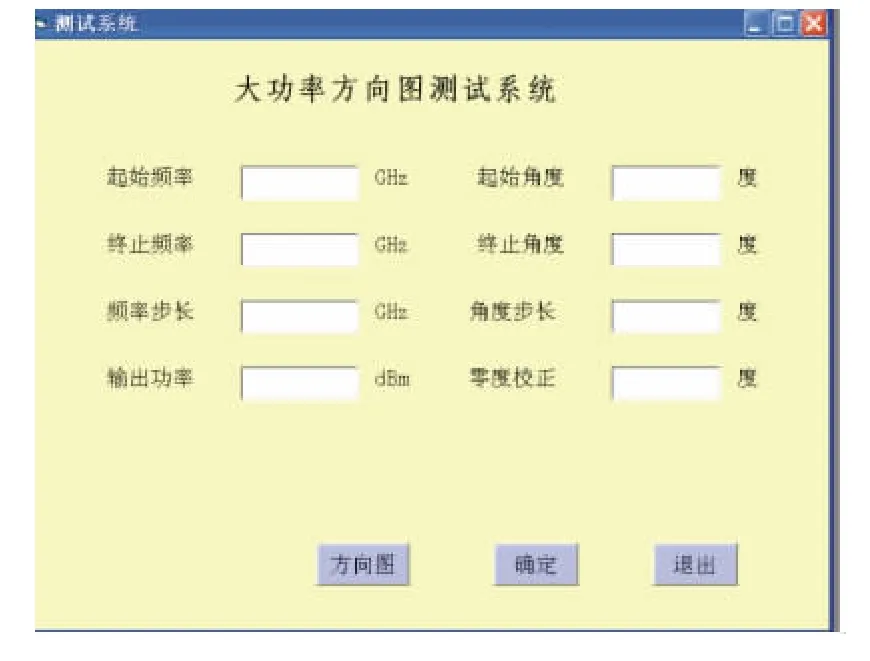
图7 用户图形界面
设置初始频率8GHz,终止频率18GHz,每隔1GHz测试一个点,角度每隔1°为一个点。角度转动范围在0°~30°内。方向图测试结果如图8所示。
用户也可根据对方向图副瓣的要求来设置更宽的角度转动范围,角度间隔精度可达到0.1°。
4 结束语
随着车载多波束发射机设备量的增多,调试测试工作也随之繁杂起来。多台套设备需要在较短时间内完成各项工作,对调试人员提出了很高的要求。传统手工控制耗时、耗力且效率低下,测试数据也不能立刻直观地绘制出来并存储。车载多波束发射机测试系统的研制成功,使得一名调试人员即可完成上述测试工作。

图8 测试结果
[1]王成安,李福军.电子测量技术与实训简明教程[M].北京:科学出版社,2007.
[2]李雁翎,王建忠,孔锐睿.Visual Basic程序设计教程[M].北京:人民邮电出版社,2012.