多传感器协同定位技术研究
2014-10-13万华
万 华
(中国电子科技集团公司38所,合肥230088)
0 引 言
单一传感器具有因自身特性所决定的局限性,在新一代作战系统中依靠单传感器所提供的探测信息已难以满足作战需求,而综合运用多传感器提供的不同维度的观测数据,不仅扩展了系统探测范围,改善了探测性能和空间分辨能力,而且降低了目标信息的模糊度,提升了系统探测的可信度[1]。
由多传感器构成的分布式探测系统具有网络化协同探测能力,对目标的发现性能、定位精度和识别能力等方面均具有明显改善。其基于实时数据交换、信息网络共享和协同处理,将多传感器探测网整合为统一有机的整体,从而协调一致地完成各项探测任务。
协同定位技术是多传感器协同探测的关键技术,是提升探测系统信息质量的重要手段。其基本思想就是利用各传感器的探测特点,通过资源管控和任务调度,实现多个传感器对同一目标的协同交叉定位。
1 协同定位的基本概念
多传感器协同定位对应的多个协同探测节点既可以是同类传感器,也可以是异类传感器;既可以是单一的地基平台,也可以是地基、海基、空基、天基等多种平台;既可以是有源传感器,也可以是无源传感器。针对不同的探测任务背景和作战需求,需要明确探测系统的不同传感器组合,如有源雷达、无源雷达、光电、红外、声探测传感器等。
下面,以雷达和光电传感器为例,具体阐述协同定位的基本概念。
雷达光电协同定位就是利用雷达和光电传感器对目标协同探测所提供的量测信息组合,获得对目标的精确位置估计。由于雷达测距精度高,光电测角精度高,因而雷达、光电协同定位不仅克服了雷达横向距离误差大的弱点,而且克服了光电传感器因仅能测角而带来的探测不确定性的问题,其基本概念见图1。
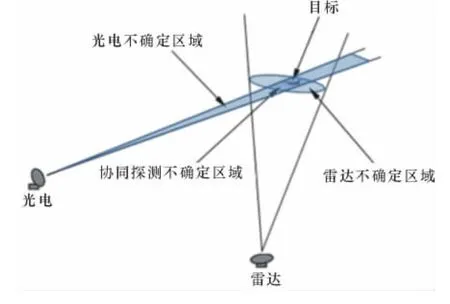
图1 雷达光电协同定位基本概念示意图
类似地,基于探测系统内的多种传感器对目标的协同定位,可以利用不同传感器所提供的多维量测信息和冗余信息,充分发挥各种传感器的量测优势,实现异类传感器优势互补。
2 多传感器协同定位技术
2.1 处理流程
多传感器协同定位,需要通过管理探测系统内多部传感器的各类资源和探测任务,对各传感器实行统一波束调度和合理资源分配[2],利用多传感器探测到的点迹数据,完成对目标的空时同步对齐处理、数据关联[3]和协同位置估计,其处理流程见图2。
由于各传感器具有各自覆盖空域内的搜索、跟踪等探测任务,为了实现对重叠区内目标的协同探测和定位,要对多部传感器的工作时间、扫描空间等资源进行统一规划、管理和分配,合理安排其搜索方式与跟踪方式之间的时间交替,统筹分配多传感器的能量资源,对各传感器的工作模式、波束指向、波束驻留时间、搜索数据率、跟踪数据率等进行编排和调度,进而实现多传感器对重叠探测区域目标的协同探测。因此,多传感器协同定位处理的实现前提就是要基于资源调度来完成各传感器之间的空时对准和同步。
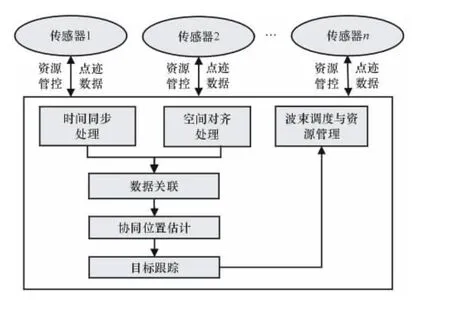
图2 多传感器协同定位处理流程
2.2 协同定位算法
针对不同的传感器组合形式,有不同的协同定位算法,常用的算法有最小二乘、加权最小二乘、极大似然估计、几何定位法、测量子集优化定位算法等[4-7],其中,工程实践中最常用的算法就是加权最小二乘协同定位算法。
假定n个传感器对目标进行协同探测,第i个传感器的位置坐标为 (xi,yi,zi),目标的位置坐标为(x,y,z),第i个传感器对目标的测量值为Zi,测量误差协方差矩阵为Ri。
若第i个传感器为雷达或声探测系统,则其测量值Zi和测量误差协方差矩阵Ri为:
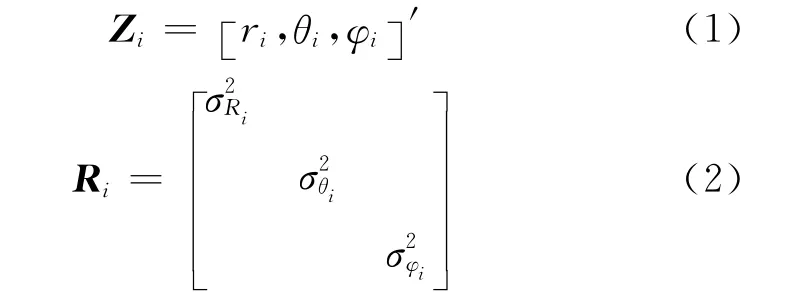
若第i个传感器为光电或红外传感器,则其测量值Zi和测量误差协方差矩阵Ri为:

式中:r为距离量测信息;θ为方位量测信息;φ为仰角量测信息。
由于传感器量测是在各自的球坐标系下获得的,进行协同定位时,首先将所有量测经过坐标转换,统一到公共坐标系下。各传感器在公共坐标系下的测量值和相应的协方差为Zoi和Pi,利用加权最小二乘协同定位算法[4],对目标的位置估计如下:


2.3 协同定位精度
协同定位精度不仅和参与协同探测的不同传感器自身量测特性有关,还和传感器、目标位置等几何分布有关[7-8]。为了描述定位误差与几何的关系,定义定位精度的几何稀释(GDOP),GDOP描述了定位误差的三维几何分布,用下式表达[7]:
若各测量子集之间互不相关,且不考虑站址误差的影响,加权最小二乘协同定位的误差协方差矩阵为:

类似地,HDOP描述了定位误差在水平面的两维几何分布,用下式表示:

3 协同试验及精度分析
由雷达、光电和声探测装备构成的多传感器探测试验系统对起飞的民航飞机进行了协同探测试验。前置部署于机场的声探测装备提供目标的预警信息,雷达在杂波区及时形成目标航迹,为光电提供目标指示信息。多传感器协同探测结果如图3所示。

图3 多传感器协同探测情况
通过雷达、声、光电不同手段的异类多传感器实现了对目标的高精度协同探测,统计整条航路探测精度,多传感器协同定位水平精度比单传感器探测精度提升了2倍以上。协同定位精度与单雷达定位精度对比如图4所示。

图4 协同定位与单雷达定位精度对比
4 结束语
多传感器协同定位技术基于多传感器的不同量测特性,综合利用多维量测信息和冗余信息,可以获得比任何一部单传感器更加准确、连续的探测信息,实现异类传感器优势互补,促使探测效能倍增。因此,多传感器协同定位技术正受到越来越广泛的关注,在预警探测领域具有广阔的应用前景。与此相关的多传感器优化部署、资源管控、任务规划与管理、系统误差校正、多目标数据关联技术、高精度时空一致性技术等也是有待深入研究的技术方向。
[1]何友,王国宏,陆大金,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[2]王新民,李乐尧,顾晓婕,等.传感器组网资源管理技术及系统仿真平台[J].测控技术,2012,31(6):6-9.
[3]孙俊生,王建民,王维锋.多传感器多目标联合概率数据关联研究[J].无线电工程,2009,39(11):19-21.
[4]费利那 A,斯塔德F A.雷达数据处理[M].匡永胜,张祖稷译.北京:国防工业出版社,1988.
[5]葛建军.传感器网络及其目标几何定位方法[J].雷达科学与技术,2009,7(2):81-84.
[6]夏军成,王春波,倪天权.多舰协同定位技术的算法[J].舰船电子对抗,2008,31(3):71-73.
[7]孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.
[8]刘方正,祁建清.三维空间定位精度分析通用模型[J].计算机工程,2012,38(3):284-286.