基于光学被动式三维测量技术在立体舌象中的探究
2014-10-10郭世珍等
郭世珍等


摘要:现在由于照相机的技术的成熟,现有舌象仪在图像的清晰度、色彩等方面都比较成熟。在二维技术中对舌体的面积、舌质的颜色、舌苔的颜色、舌苔的面积、齿痕的面积、舌裂纹的长度、点刺的面积、瘀斑的面积这些特征的采集的数据还是相当客观的,但是对于舌苔的厚度,裂纹的深度、齿痕的深度、点刺的高度等一些三维的数据,现有的舌象仪是无法采集到的,而且平面的中的图像和肉眼看到的立体图像还是有一定的差异的。三维测量技术可以实现舌象的全方位立体显示,获得更多二维平面中没有的三维信息。
关键词:三维测量;三维舌象
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2014)24-5750-02
Abstract: due to camera technology matures, now existing tongue like instrument in image clarity, color, etc are more mature.In 2 d technology in the area of the tongue body and tongue nature color, the color of tongue coating and tongue coating area, the area of the teeth marks, crack, the length of the tongue prick bruises, the area of the characteristics of the area of the collected data is objective, but for the thickness of the coating on the tongue, the depth of the crack, the depth of the teeth marks, prick some 3 d data, such as the height of the existing tongue instrument cannot be collected, and the plane of the image and the three-dimensional images of the naked eye or have certain differences.3 d measurement technology can realize omni-directional stereo display, tongue like get more three-dimensional information not found in two-dimensional plane.
Key words: three-dimensional tongue; for three dimensional measurements
1 三维测量
三维测量技术主要分为两大类:接触式的三维测量和非接触式的三维测量。接触式的三维测量主要是使用三坐标测量机。非接触式的三维测量分为声学、电磁学和光学三个方面。声学方面的三维测量主要是超声波测距。电磁学方面的三维测量又分为:工业CT和核磁共振。光学方面的三维测量分为主动式的和被动式的。主动式的主要是激光测量和结构光投影测量。被动式分为双目立体视觉法测量、单目视觉法测量和多目测量。舌头是人体较为敏感的部位,检测时应尽量避免触碰,所以接触式的三维测量显然不适合舌象的三维建模。然而,从经济方面考虑,非接触式三维测量中的电磁学方面的CT和核磁共振价格又偏高,考虑到经济方面的问题本课题也没有采取它来构建舌象的三维模型。超声波测量出三维数据精度较低也太适合舌象的三维建模。最后我们选用光学的三维测量来建立舌象的三维模型。由此,该文选用光学的三维测量来建立舌象的三维模型。
2 被动式三维测量
被动式的三维重建主要是利用摄像机或照相机从不同角度获取场景中的序列图像,再通过光学成像原理生成视差图,获得物体的空间三维信息。被动式的三维重建主要分为图像获取、相机标定、特征匹配、三维坐标计算等几个步骤。
2.1 图像获取
图像的获取是第一步,也是比较关键的一步,现在研究的比较多的还是采取双目图像,图1是一张用双目三维照相机拍摄的舌象图片。
我们主要从舌体颜色和舌体纹理来分析这张图片。首先是颜色,这张图片可以看出舌体的基本色,和原始二维图像对比舌体颜色失真。从二维图像可以看出该舌体有一些点刺但是从三维图像上根本看不出点刺信息。而且从三维图像上无法区分舌裂纹、齿痕等舌体特征的颜色。再从纹理上看,三维图像两侧失真很严重,舌体两侧的信息基本变形,无法辨识舌体两侧齿痕信息。舌面的纹理还原的基本符合舌体特征。根据上图可以推测基于双目技术的三维照相机拍摄出的三维照片的颜色还原的不太好,正面纹理还原效果要好于两侧纹理的还原效果。
图2是catch123d软件重建的舌象模型,catch123d的技术是基于多目视觉三维技术测量,获得多幅图片主要是有两种:最常用的一种是在被拍摄物体周围设置多架相机同时拍摄从而获得多幅照片,另一种是设置一个摄像机围绕着物体录摄从而获得多幅照片。因为舌体在拍摄的过程中是微动的,为了保证在最短的时间内获取舌象的序列图像我们采取第一种方式。
对于图2我们主要从舌体的颜色和舌体的纹理来分析该方法是否适合获取舌体的三维模型。首先是颜色相比原图颜色有一点暗,但是基本还原的舌体的颜色,在我们做的其他图像中这种方法基本可以还原舌体颜色同时还有舌体特征的颜色包括齿痕、舌裂纹、瘀斑、舌苔。再从舌体纹理上看,纹理还是比较模糊的,只有比较明显的齿痕和较深的舌裂纹可以重构出来,当然这和相机的分辨率有一定的关系,如果采取更高分辨率的相机或许可以重构出更细微的舌体纹理。
基于以上研究我们认为基于多目视觉三维测量技术能更好的重构舌象的三维模型(包括舌体颜色和舌体纹理)。
2.2 相机标定
相机标定是为了确定相机的属性及位置参数,以确定空间坐标系中物体三维坐标点与它的象直接的映射关系。相机标定一般分为传统标定方法、主动视觉标定方法和自标定方法。我们研究的舌象的三维重构基本用的是自标定方法。
2.3 图像匹配
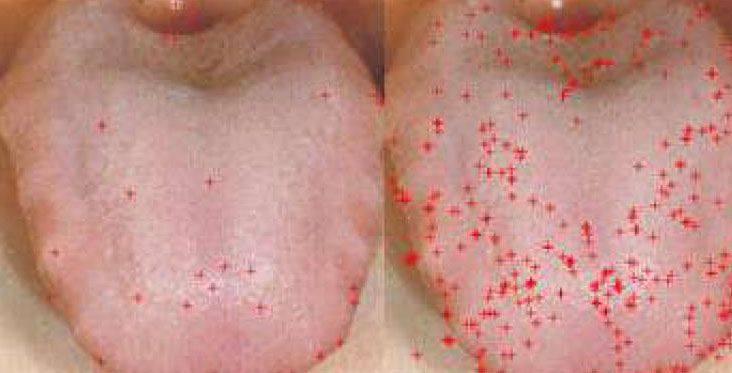
图像匹配就是在图像之间找对应点的过程。现在主要的图像匹配方法有:基于灰度信息图像匹配方法、基于变换域的图像匹配方法、基于特征信息的图像匹配方法。灰度匹配是利用某种相似性度量来判断图像的对应关系。灰度图像匹配方法的处理过程简单但是计算量大,对于有速度要求的应用不太适合。3d舌象仪要求采集完舌象后在要求的时间内显示检测者的立体舌象,如果图像匹配时间过长会影响整体仪器的使用效果。基于变换域的图像匹配方法可以有效的消除噪声等因素,但是图像本身对算法的影响也很大,容易出现匹配不准。基于特征提取匹配的方法是现在比较流行的匹配方法。该方法主要是找特征点,依据特征点建立相似度函数实现图像匹配。在用此方法找舌象的特征点时我们用的几种方法,例如:在嘴的两边贴一些十字贴、在舌象上打光栅。同时选择合适的特征点匹配算法也是关键一步,进过实验对比图3是用sift和surf算法提取效果对比左图是sift提取算法,提取效果理想,能明显图区到舌根处白点。在算法上我们选择sift来提取特征点。
虽然基于多目技术还有很多问题例如,特征点难匹配,运算速度慢,细微纹理显示模糊等但是相对单目和双目对舌体颜色的还原和舌体纹理的获取我们认为多目视觉三维测量技术更适合舌象三维模型的构建。
参考文献:
[1] 达飞鹏,盖绍彦.光栅投影三维精密测量[M].北京:科学出版社,2011.
[2] 马淑贞.光学三维相位轮廓测量技术研究[D].昆明:昆明理工大学,2003.
[3] 陈力.大景深便携式三维激光扫描仪及其在机器人视觉中的应用[D].成都:四川大学,2006.
[4] Marr D.Image processing and machine vision [M].USA: Freeman and compay,1973.
[5] J.E.W.Mayhew and.J.P.Frisby,Editors, 3D model recognition from stereoscopic cues,MITPress,1991.
