盾构推进液压系统控制模式的分析比较
2014-10-10贾连辉
贾连辉
(中铁工程装备集团有限公司,河南 郑州 450016)
0 引言
推进液压系统是盾构的重要组成部分,承担着整个盾构的向前推进、姿态调整等复杂的任务。因此,推进液压系统性能的好坏直接影响盾构的整体性能[1-2]。
在工程应用中,由于地质情况的复杂性和施工现场中许多不可预见因素的影响[3],使得盾构推进液压系统的控制变得非常复杂。推进速度过快或者不合适、推进压力与土质情况以及水土压力不匹配都会引发地表沉降或隆起超过预期设计,造成周围建筑物开裂甚至倒塌以及邻近的管道线路断裂破损等环境地质灾害[4]。因此,需要对推进系统的速度、压力同时进行无级调节,从而实现对盾构转向、姿态调整的精确控制。学者们对盾构推进系统进行了深入研究[5-6]。文献[7]分析了复杂地质条件下掘进时冗余驱动推进系统不同分组策略下载荷的传递特性,提出基于地质条件的推进系统分组策略。文献[8]针对盾构施工地质条件复杂、易出现突变载荷而造成掘进装备失效的问题,提出盾构推进系统顺义性的概念并定义其评价指标,以调速阀模式为例建立盾构推进系统解析模型。文献[9]在分析推进液压系统复合控制的工作原理基础上,设计了基于BP神经网络的的盾构推进速度自适应PID控制器,并对常规PID推进速度控制和基于BP神经网络的自适应PID推进速度控制进行了阶跃响应仿真对比。文献[10]基于液压力控制系统分类和原理,介绍了利用电液比例泵配合其他控制元件实现盾构推进系统控制的设计方案的可行性。从以上研究成果来看,对推进系统的研究以推进分组策略和推进控制算法居多,而从液压控制原理角度来分析比较推进系统不同控制模式的还比较少。目前,推进液压系统主要有2种方案,一是采用比例溢流阀与比例调速阀相结合的压力流量复合控制,二是采用比例减压阀与电液比例泵相配合的方式达到压力流量同步精确控制的目的。本文结合不同控制模式进行理论分析,并在基于AMESIM所建仿真模型上仿真比较2种控制模式下的压力和速度响应特性以及在负载扰动下的流量响应特性,通过对工程实际应用的对比测试,验证理论分析和仿真比较的正确性。
1 推进系统结构
推进系统具有大功率、变负载和工作条件恶劣等特点,一般采用液压控制系统,由推进液压缸、液压泵、比例控制阀以及其他液压辅件组成。系统执行机构推进液压缸安装于盾构密封舱隔板后部,沿盾体周向均匀分布,作用在管片上,通过液压控制阀控制其伸出速度和压力[11]。一般推进系统的液压缸数目较多,考虑到每个液压缸单独控制的复杂性和高昂的成本,一般会将推进液压缸分区控制,即将液压缸分成上下左右4组,每组单独设置控制机构。这样既达到了盾构调整姿态、纠偏的目的,又可以节省成本、降低控制难度。每组推进油缸中均有1根安装有内置式位移传感器,位移信号通过PLC显示在上位机上;装有位移传感器的推进缸控制阀组上还装有压力传感器。通过调整每组油缸的不同推进压力来进行盾构纠偏和调向。
推进系统有2种工况模式:推进模式和管片拼装模式。推进模式时,系统压力设定在较高值,推进油缸伸出;管片拼装模式时,系统压力设定在较低值,部分推进油缸缩回,管片拼装好后,油缸再伸出顶住管片。
2 2种控制原理说明
2.1 压力流量复合控制方案
压力流量复合控制方案源于最初的推进液压系统。该方案采用了比例控制技术,并配合以远控恒压变量泵和比例调速阀构成容积节流调速系统。远控恒压变量泵和压力流量复合控制方案液压原理图分别如图1和图2所示。

图1 远控恒压变量泵Fig.1 Remote-controlled constant pressure variable pump

图2 压力流量复合控制方案液压原理图[12]Fig.2 Hydraulic schematic diagram of pressure-flow compound control mode
系统由远控恒压变量泵提供压力油,推进模式下,4个分区中的推进液压缸压力pA,pB,pC和pD通过压力传感器进入一个比较环节,其最大值为驱动负载所需的最高压力pmax。变量泵输出压力p=pmax+Δp。其中Δ p为保证比例调速阀稳定工作的最小压差。压力油经比例调速阀1、电液换向阀8、液控单向阀10进入推进油缸无杆腔,活塞杆伸出;管片拼装模式下,系统设定远控恒压泵的最大输出压力为固定值,此时电磁阀3,6得电,压力油经插装阀2、电液换向阀8进入有杆腔,回油直接通过插装阀5回油箱,使推进缸快速回退,提高拼装效率。变量泵输出压力跟随负载变化,电控负载敏感控制实现了压力自适应,减少了系统压力损失,降低了能耗。
系统通过比例溢流阀和比例调速阀分别对系统压力、流量进行调节。通过安装在液压缸上的压力、位移传感器检测信号并反馈至比较器,形成压力、速度闭环控制,其控制原理框图如图3所示。

图3 压力流量复合控制原理框图Fig.3 Block diagram of principle of pressure-flow compound control mode
该方案采用比例溢流阀对工作压力进行调节,采用比例调速阀进行速度调节。比例调速阀的输入信号决定液压缸的最大推进速度,负载阻力的大小是决定推进速度的另一个因素。对其中某一个分区来说有流量关系:qv=qv1+qv2,其中qv,qv1和qv2分别为比例调速阀的流量调定值、进入推进缸的流量以及通过比例溢流阀的溢流量,比例溢流阀的溢流量受推进压力的影响,而推进压力又与总推进力有关,因此在最大推进速度确定的前提下,推进液压缸的推进速度还与总推进力的大小有关。盾构推进采用分区控制,每区都要设置比例溢流阀和比例调速阀,结构较为复杂,被控元件数量较多。并且由于采用溢流调压和节流调速,该方案存在一定的溢流损失和节流损失。
2.2 比例减压阀方案
该方案采用比例减压阀对推进液压缸压力进行调节,配合以电液比例变量泵对流量进行调节。图4为比例减压阀方案的液压原理图,由于只需对推进工况进行压力精确控制,故比例减压阀位于推进液压缸无杆腔的进油路上。二通插装阀用于单独控制本组油缸快速动作,当两位三通电磁阀得电时,插装阀打开,本组液压缸快速伸出或缩回;反之则不得电。
系统的流量即液压缸的速度通过电液比例泵进行调节。本文以力士乐A11VOEP2泵为例,分析比例减压阀方案。图5为电液比例泵原理图,该泵具有压力切断功能,通过外控口可以设置压力切断值的大小。根据盾构推进系统的推进模式和拼装模式分别设置2级切断值。在系统的压力未达到设定的压力切断值时,通过改变控制电流的大小改变电磁阀芯的位移,从而改变泵的排量;当系统压力超过设定值时,压力切断阀工作,泵排量回摆至最小。泵的排量与输入的控制电流成正比例关系。泵的排量采用机-液闭环控制,使得泵的排量与控制电流具有很好的线性相关性,降低了系统对速度控制的难度。该方案同样在液压缸上安装压力、位移传感器,从而实现各参数的闭环控制[12]。
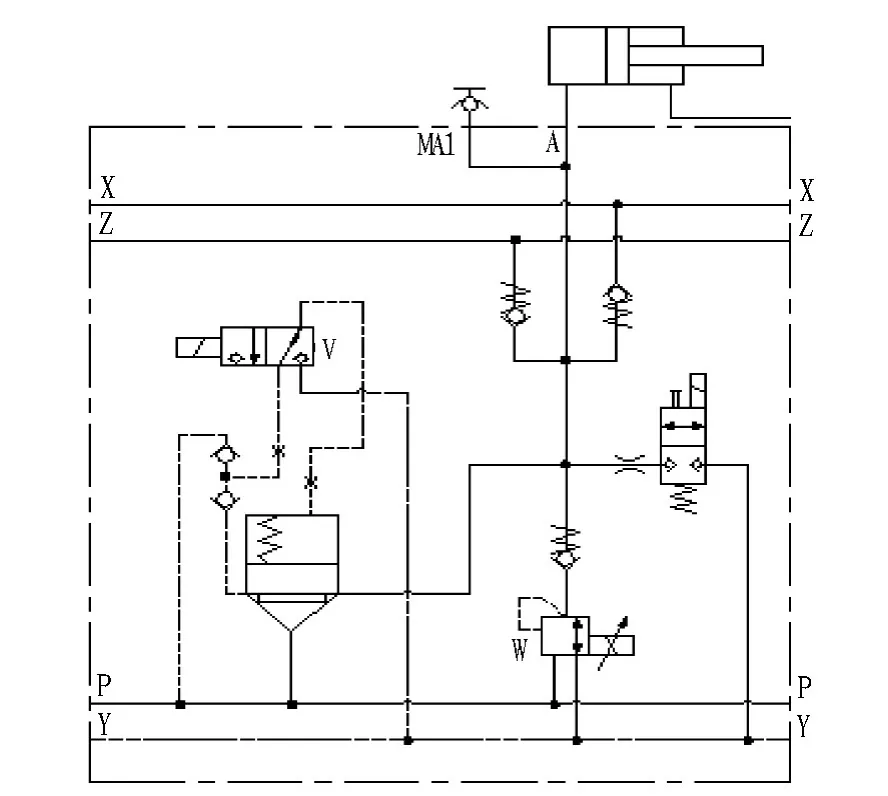
图4 比例减压阀控制方案液压原理Fig.4 Hydraulic schematic diagram of proportional pressure reducing valve control mode

图5 电液比例变量泵Fig.5 Electro-hydraulic proportional variable pump
比例减压阀控制每组推进压力,通过其流量是自适应的,为提高控制性能,采用三通型比例减压阀。三通比例减压阀包括主阀和先导控制单元2个部分[13],三通比例减压阀结构如图6所示。三通比例减压阀有3个油口,从功能上看,P与A相通时减压,A与T相通时溢流,能够保证负载流量较小甚至为负时的压力控制性能。

图6 三通比例减压阀结构Fig.6 Structure of three-way proportional pressure reducing valve
上述系统中,需在每个分区的进油路上设置1个比例减压阀,用以对该组液压缸推进压力进行精确调节,比例减压阀在实现压力稳定的前提下不能稳定通过的流量。通过比例减压阀的流量在先导阀最小稳定流量与主阀的额定通流量之间变化,整个推进系统的流量供给由电液比例泵调节,因此在保证液压缸输入压力的条件下,液压缸推进速度是由施加在刀盘上的各组力共同决定的。相比压力流量复合控制方案,该系统结构相对简单,控制元件较少,成本相对也较低。电液比例泵上带有排量反馈,形成流量闭环控制,输出的流量与负载所需的流量相适应,故除了在减压阀上的节流损失,该系统没有溢流损失,这对于功率大范围变化的盾构推进系统,节能效果是显著的。由于采取的是单泵对多个执行机构的容积调速,系统并不能对每组液压缸进行单独调速,并且需要提供一个恒转速的动力源或是将原动机、液压传动系统、推进液压缸做整体的匹配控制,这样增加了控制的复杂性。
3 仿真分析
以直径6.25 m盾构推进系统为例,在AMEsim中分别搭建2种方案的仿真模型如图7和图8所示。所建模型为推进模式并忽略了管道液容等影响较小的因素。针对2种方案推进系统的压力速度控制特性进行仿真分析。图9为推进压力控制仿真结果,图10为推进速度控制仿真结果。

图7 压力流量复合控制仿真模型Fig.7 Simulation model of“proportional speed regulating valve+proportional relief valve”control mode
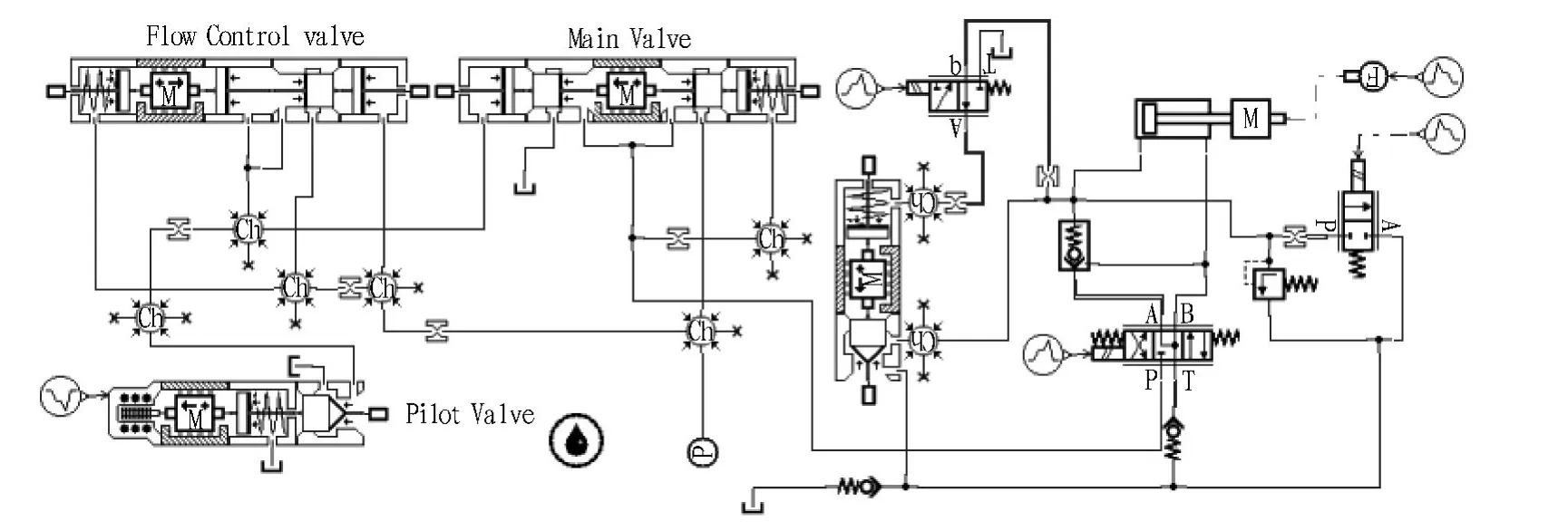
图8 三通比例减压阀控制仿真模型Fig.8 Simulation model of three-way proportional pressure reducing valve control mode
仿真时,系统工作压力在第6 s时由7 MPa阶跃至10 MPa,由图9可以看到2种方式的压力阶跃响应没有明显的差别,都在经过一段振荡之后回到稳态,从图10可以看到,在压力突变的瞬间,推进速度都受到了扰动,相比而言采用比例调速阀方式的扰动幅度较小;系统速度在第11 s时由40 mm/min调整至70 mm/min,由图10可以看到,2种方式的速度都在一段振荡之后回到稳定状态,相比而言比例调速阀方式的调整时间较短,响应速度较快,从图9可以看到,在速度突变的瞬间,推进压力都受到了扰动,相对而言,比例减压阀方式的扰动幅度更大。

图9 压力-时间曲线Fig.9 Pressure-time curve

图10 速度-时间曲线Fig.10 Speed-time curve
在负载扰动下仿真分析通过比例调速阀和比例减压阀的流量响应,分别得到其流量特性曲线如图11中的曲线1和曲线2所示,由流量响应曲线可知,在突变负载作用下,通过比例调速阀的流量能够基本保持稳定,系统响应时间短,超调量小。对于采用比例减压阀的方案,由于某一组的负载扰动会导致由比例泵输出流量在所有分组的分配改变,因此通过该组比例减压阀的流量在负载扰动下会有明显的振荡,流量的瞬变也会对其输出压力的稳定性产生不利影响。

图11 负载扰动下的流量特性曲线Fig.11 Curve of flow characteristics under load disturbance
从以上2种方式仿真对比结果可以看出,2种方式都能对压力和速度2个参数同时进行精确的调节和控制,达到盾构推进系统的要求;比例调速阀+比例溢流阀方式的压力和速度2个参数的控制相对较容易,响应速度相对较快,两者的相互扰动耦合较小。
4 工程实际应用情况对比
结合上述2种推进方式的动态仿真,对盾构实际掘进情况下,比例减压阀控制模式盾构和比例压力流量复合控制模式进行实际掘进速度和压力进行了数据检测及数据采集。对用于北京地铁的2台盾构进行了相关测试,1台为国外某品牌盾构,推进系统采用比例减压控制模式对推进压力控制,泵采用电比例排量控制;另外1台盾构为中铁装备盾构,采用比例调速阀+比例溢流阀复合控制模式。掘进地层均为粉质黏土、粉细砂地层,覆土厚度相当,对C组压力和位移变化进行采集分析,采集数据曲线如图12—15所示。

图12 国外某盾构C组压力监测曲线Fig.12 Curve of pressure of C group of a foreign brand shield

图13 中铁装备盾构C组压力监测曲线Fig.13 Curve of pressure of C group of CREG shield

图14 国外某盾构C组位移监测曲线Fig.14 Curve of displacement of C group of a foreign brand shield

图15 中铁装备盾构C组位移监测曲线Fig.15 Curve of displacement of C group of CREG shield
从图12—15不难看出,采用比例减压控制模式盾构在掘进过程中,推进油缸的压力及位移变化波动较大,压力调整响应速度不及比例压力流量复合控制模式,这种油缸压力和位移变化的频繁波动会对盾构姿态控制和土仓压力控制产生一定影响,进而对沉降控制不利。
5 结论与体会
2种盾构推进液压系统控制模式的控制机制相同,它们都属于力控制系统,根据比例压力阀的静态特性来满足推进要求。采用压力流量复合控制方法,结构相对复杂,但整体控制性能好,并且由于各组有独立调速阀进行速度粗调,组间压力和流量的耦合作用小,有利于推进压力和速度的控制。这种控制模式尽管同时存在节流损失和溢流损失,但电控负载敏感技术的应用使其节能效果得到很大提高,目前中铁装备、海瑞克盾构采用这种控制模式。比例减压阀方案控制元件较少,结构相对简单,节能效果良好,但由于比例减压阀只能控制各组推进压力,推进系统在4个分组的实时流量分配受多种因素的影响,组间压力和流量耦合作用明显,导致系统对盾构姿态控制比较敏感,表现在工程应用中就是推进压力和速度波动较大,尤其在软弱不均地层,这种控制模式显然对司机操作水平要求更高。因此,在选择设计方案时应综合考虑各方面的因素,目前法国的NFM、日本的三菱和小松等生产的盾构多采用比例减压阀方案,在实际的国内施工中,在软弱地层,极易出现姿态控制的骤变,造成“栽头”或纠偏过度的现象。综合以上分析及目前国内盾构操作水平及习惯,采用压力流量复合控制方案将更适应国内的用户。
[1]吴根茂,邱敏秀,王庆丰,等.新编实用电液比例技术[M].杭州:浙江大学出版社,2006.(WU Genmao,QIU Minxiu,WANG Qingfeng,et al.Electrohydraulic proportional technique in theory and application[M].Hangzhou:Press of Zhejiang University,2006.(in Chinese))
[2]杨华勇,龚国芳.盾构掘进机及其液压技术的应用[J].液压气动与密封,2004(1):27-29.(YANG Huayong,GONG Guofang.Shield TBM and its applications of hydraulic technology[J].Hydraulics Pneumatics & Seals,2004(1):27 -29.(in Chinese))
[3] 施仲衡.盾构机在中国地铁建设中的应用[J].建筑机械,2002(5):20.(SHI Zhongheng.Application of shield machine in underground railway construction of China [J].Construction Machinery,2002(5):20.(in Chinese))
[4] 王梦恕,谭忠盛.中国隧道及地下工程修建技术[J].中国工程科学,2010,12(12):4 -10.(WANG Mengshu,TAN Zhongsheng.The construct technology of tunnel and underground engineering in China[J].Engineering Science,2010,12(12):4 -10.(in Chinese))
[5]胡国良,龚国芳,杨华勇,等.盾构掘进机推进液压系统压力流量复合控制分析[J].煤炭学报,2006(2):125-128.(HU Guoliang,GONG Guofang,YANG Huayong,et al.Pressure and flow compound control analysis of thrust hydraulic system for shield tunneling machine[J].Journal of China Coal Society,2006(2):125 -128.(in Chinese))
[6]张庆贺,朱忠隆,杨俊龙,等.盾构推进引起土体扰动理论分析及实验研究[J].岩石力学与工程学报,1999(6):699 - 703.(ZHANG Qinghe,ZHU Zhonglong,YANG Junlong,et al.Theory analysis and testing study of soil disturbance caused by shield-driven[J].Chinese Journal of Rock Mechanics and Engineering,1999(6):699 -703.(in Chinese))
[7]邵鑫,余海东,张凯之,等.复合岩土掘进时盾构机冗余驱动推进系统的分组策略[J].机械设计与研究,2011,27(1):27 - 28.(SHAO Xin,YU Haidong,ZHANG Kaizhi,et al.Grouping strategy research on shiled machine thrust system excavating in compound geology[J].Mechanic Design and Research,2011,27(1):27 -28.(in Chinese))
[8]侯典清,龚国芳,施虎,等.基于顺应特性的新型盾构推进系统设计[J].浙江大学学报:工学版,2013,47(7):49 -53.(HOU Dianqing,GONG Guofang,SHI Hu,et al.Design of new propulsion system of shield tunneling machine based on compliance characteristics[J].Journal of Zhejiang University:Engineering Science,2013,47(7):49 -53.(in Chinese))
[9]刘国斌,龚国芳,朱北斗,等.基于BP神经网络的盾构推进速度自适应 PID控制[J].工程设计学报,2010,17(6):44 -46.(LIU Guobin,GONG Guofang,ZHU Beidou,et al.Adaptive PID control for thrust speed of the shield based on BP neural networks[J].Journal of Engineering Design,2010,17(6):44 -46.(in Chinese))
[10]王小强,王振,王栋,等.盾构机推进液压系统方案一例[J].流体传动与控制,2012(6):23-24.(WANG Xiaoqiang,WANG Zhen,WANG Dong,et al.A case of hydraulicthrust system of shield tunneling machines[J].Fluid Power Transmission and Control,2012(6):23 - 24.(in Chinese))
[11]袁超.EPB-6250土压平衡盾构机推进系统的复合控制[J].技术与市场,2006(12):28 -30.(YUAN Chao,EPB-6250 thrust system compound control of EPB shield machine[J].Technology and Market,2006(12):28 - 30.(in Chinese))
[12]刘杰,卿启湘,桂林,等.EPB盾构机推进系统振动响应分析[J].工程设计学报,2013(6):22-24.(LIU Jie,QING Qixiang,GUI Lin,et al.Research on vibration response of EPB thrust system[J].Journal of Engineering Design,2013(6):22 -24.(in Chinese))
[13]姚佳.直动式三通电液比例减压阀动态性能研究[J].科技创新导报,2012(35):88-89.(YAO Jia.The investigation on dynamic characteristics for direct operated electro-hydraulic three way proportional reducing valve[J].Science and Technology Consulting Herald,2012(35):88 -89.(in Chinese))