深松整地作业自动鉴别系统
2014-10-09哈尔滨工业大学信息技术研究所信息工程系黑龙江省农业委员会农业机械化管理局
1、哈尔滨工业大学信息技术研究所、信息工程系 2、黑龙江省农业委员会农业机械化管理局
1 引言
土壤深松是保护性耕作的重要技术环节之一[1]。土壤深松是指使用深松机,松碎耕作层以下5~15 cm的犁底层,使松土层的厚度加深。深松主要由不同的动力机械配套相应的深松机械来完成。
在农业生产中,深松能疏松土壤、打破土壤犁底层、提高土壤蓄水能力、抗旱排涝、排除盐碱、减小耕作阻力、增强雨水入渗速度和数量、减少径流,并且不扰乱地表耕作层[2,3]。土壤的蓄水能力提高后,为农作物提供了更多的天然降水资源;打破土壤犁底层后,能有效地提高土壤的透水、透气性能。因此深松能极大地改善土壤的循环使用状况,为作物生长发育创造了适宜的土壤条件,使得土壤变得适宜作物生长发育、根系深扎,成为真正的“沃土”,从而达到保护耕地、农作物增产的最终目的。经过黑龙江省试验测定,深松整地是提高粮食产量的有效途径,在深松当年,作物产量可增加8-10%,次年可增加10-20%。尽管深松整地对耕地的益处已经成为共识,但在实际操作中,农机大户、家庭农场、个人农机的机械力量有限,土地面积有限,深松成本高使得这一技术的推广应用受到一定限制;另一方面,传统的人工深松整地检测需要消耗大量的人力、财力、物力并且无法实现全面检测,也给深松整地的推广造成了一定的困难。
21世纪的农业发展将告别传统的粗犷式发展,迎来精准农业时代[4]。哈尔滨工业大学信息技术研究所、信息工程系在黑龙江省农业委员会农业机械化管理局的大力支持下,经历3年攻关,克服多项技术难题,在全世界范围内首次实现了农机深松作业精确探测,下面对该系统进行简介。
2 系统工作方式与原理简介
农机深松探测系统是一种基于多传感器多源信息融合与决策方法的系统。首先,根据农机深松时功率大、油耗高、阻力大、行驶速度低等特点,综合当地土壤土质、含水量等因素,判断出疑似进行深松作业的农机;然后通过安装在农机上的摄像头采集的图像,判断农机是否在进行深松作业,并判断出土壤土质及含水量信息,计算出农机深松深度;最后根据基于单目视觉的可见光图像深松深度精确测量技术,对计算出的农机深松深度进行校正,得到较为精确的农机深松深度。
在进行农机疑似深松作业判别时,需要通过功率传感器获得农机作业的实时功率信息,通过加速度传感器获取农机作业时的加速度信息。农机深松探测系统通过以上信息协同,判断出疑似进行深松作业的农机,然后进行下一步的判断。在进行农机深松深度的精确测量时,需要通过摄像头采集的图像判断农机是否在进行深松作业,通过图像传感器判断出土壤的土质以及土壤湿度信息。计算出农机深松的深度,并通过摄像头成像的原理,采用基于单目视觉可见光图像高度测量技术,对计算出的农机深松深度值进行进一步校正,得到较为精确的农机深松深度。农机深松探测系统的工作方式如图1所示。
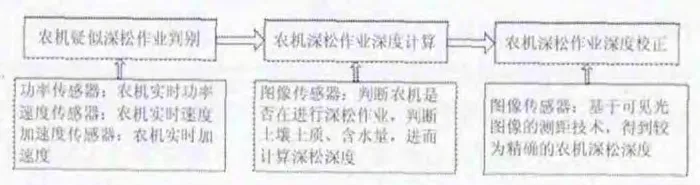
图1 农机深松探测系统工作方式简介
3 相关技术简介
由于农机在进行深松作业时,具有大功率、高油耗、低速度的特点,这里采用功率传感器采集农机作业时的实时功率,采用速度传感器采集农机的实时行驶速度作为判断依据;由于板结土层的土壤结块,阻力巨大,农机呈现“震荡式前进”的特点,速度慢但飘忽不定,这里采用加速度传感器采集农机作业时的实时加速度作为另一个判断依据。由以上因素综合判断,检测出疑似进行深松作业的农机,然后进行下一步的判断。
对于疑似进行深松作业的农机,利用安装在农机上的摄像头采集的图像来判断农机是否在进行深松作业。
将拍摄的照片经过特征提取,利用特征信息进行建模,根据建立的模型可以测出土壤的含水率。
摄像头采集到的图像信息,采用基于小波变换特征提取和S V M分类算法的土壤土质识别方法,判断出农田土壤土质。综合以土壤的含水率、土质以及农机发动机的功率、加速度信息,可以通过非线性拟合的方法计算出农机深松作业的深度信息,但该方法最终是解一个二次方程,将产生两个可能的深度解,需要进一步校正确定。
上述方法得到的农机深松深度为两个可能的值,需要进一步校正,在这里采用了一种基于单目视觉的可见光图像测距方法,得到了较为精确的农机深松深度信息。该测距方法解决了现有的图像测量方法设备复杂,计算量大,以及测量误差大的问题。发明的图像测距方法通过固定角度的摄像头采集的图像,然后,建立图像中每相邻两个像素竖直、水平距离与空间实际距离的一一对应关系,最后通过上述一一对应关系得到图像中任意两点之间的实际距离。
通过上述方法可以测得较为准确的农机深松深度信息,作为对前述两个可能深度的校正。
4 农机深松作业面积计算
本文介绍的农机深松探测系统,可以通过两种方式求得农机深松的作业面积;一种是通过农机的作业幅宽乘以农机的作业里程,直接得到作业面积。另一种是基于GPS—GPRS的农机作业临近点矩形累加面积测量方法。方法一需要现场测量农机的作业幅宽,因此,本节重点介绍第二种方法。
基于GPS—GPRS的农机作业临近点矩形累加面积测量方法,涉及GPS测量和GPRS传输领域,它解决了现有农机作业面积测量方法实时性较差、效率低的问题。其方法:首先将农机GPS定位信息每隔一定时间通过GPRS网络传输至服务器数据库;然后,对数据库中农机轨迹数据进行初步处理并过滤;最后,对过滤后的数据信息进行进一步处理,除去非作业点(即农机往返于作业区途中的轨迹点),保留作业点,将连续两作业点按矩形展开,经累加获得农机作业面积。
结论
土壤实现机械深松正在变为一种使粮食增产最有效、先进的技术耕作制度而被人们认识和认可,更是保持耕地粮食产量可持续发展、确保我国粮食安全的重要举措。本文介绍的农机深松探测系统,对农机深松整地进行作业状态实时精确测量统计,是我国农业现代化、信息化发展过程中的一大进展。
[1]朱瑞祥,张军昌等.保护性耕作条件下的深松技术试验[J].农业工程学报,2009,(06).
[2]秦红灵,高旺盛等.两年免耕后深松对土壤水分的影响[J]中国农业科学.2008,(01).
[3]宫秀杰,钱春荣等.深松免耕技术对土壤物理性状及玉米产量的影响[J]玉米科学.2009,(05).
[4]赵春江.对我国未来精准农业发展的思考[J].2010,(04).
