数控地毯样机选纱系统研究
2014-09-26于启保戴惠良杨延竹许新军
于启保,戴惠良,杨延竹,许新军
(东华大学机械工程学院,上海201620)
数控地毯样机选纱系统研究
于启保,戴惠良*,杨延竹,许新军
(东华大学机械工程学院,上海201620)
为适应快速化、智能化生产需求,在传统纺机选纱机构基础上,提出一种新型数控地毯样机的选纱系统。该系统上位机采用Visual Basic 6.0进行系统软件开发,实现地毯图案花型数据读取与转换等功能。下位机综合运用GALIL运动控制卡、接近开关、电磁阀等部件实现系统运动控制。结果证明,该系统可自动进行纱线选取与漏纱检测,准确高效,满足生产要求,提高了样品质量和生产速度。
数控地毯样机;选纱系统;Visual Basic 6.0;GALIL运动控制卡;接近开关
中国地毯业起步于20世纪80年代中期,近年来中国旅游业、酒店业和房地产业发展迅猛,地毯市场以每年20%的速度持续增长[1]。阿克明斯特地毯图案丰富、风格细腻,广泛用于高级酒店、会议场馆,市场需求量持续增长。阿克明斯特地毯生产中使用纱线等长络筒,为了保证纱线满足生产的需求,需要对纱线进行超额投料,成本较高[2]。因此,在批量生产地毯之前,常常生产出地毯样品以供研究设计人员和客户参考。目前在地毯样机研究方面:国外如澳大利亚Modra公司开发的Mtuft簇绒地毯样机技术相对成熟,可在20min内生产出一种地毯样品[3];国内尚无单位设计出专门的新型数控地毯打样设备。
针对阿克明斯特地毯生产工艺以及市场需求,文中设计出一种新型数控地毯样机选纱系统。选纱系统是数控地毯样机中的关键机构,其性能的优劣将直接影响地毯样机以及地毯样品质量。该选纱系统在设计过程中涉及应用虚拟样机技术[4]、软件开发技术、数控机床技术和传感技术等相关技术,且最终研制出实体机构。
1 系统机械结构设计及工作原理简介
1.1 机械结构设计
在分析、研究国内外先进阿克明斯特地毯织机[5]、簇绒地毯织机[6~7]等织机机构的基础上,对其选纱机构进行改进和创新设计,具体机械结构见图1。该机构主要工作部件有纱筒、大带轮、鸟嘴、小带轮和气缸。纱筒共有20个纱线引导孔,最多可供20种不同颜色纱线进行绒织。大、小带轮分别由步进电机和伺服电机驱动,鸟嘴的开闭由气缸的伸缩控制完成。
1.2 工作原理简介
当选纱系统运行时,首先上位机读取地毯图像(bmp格式)各像素点颜色RGB值,接着转化为相应的花型数据,最后发送至下位机。在下位机工作时,步进电机通过大带轮驱动纱筒按照花型数据转动到预定位置后停止;此时伺服电机通过小带轮驱动鸟嘴上升至预定位置时,气缸收缩,鸟嘴闭合,夹紧纱线,纱线与鸟嘴共同向下运动至预定位置时,气缸伸长,鸟嘴打开,这样即可完成选纱工作。通过纱筒的旋转,可实现不同纱线的选取。完整的提花过程在纱线选取之后还有割纱和针刺等运动,在此不做赘述。
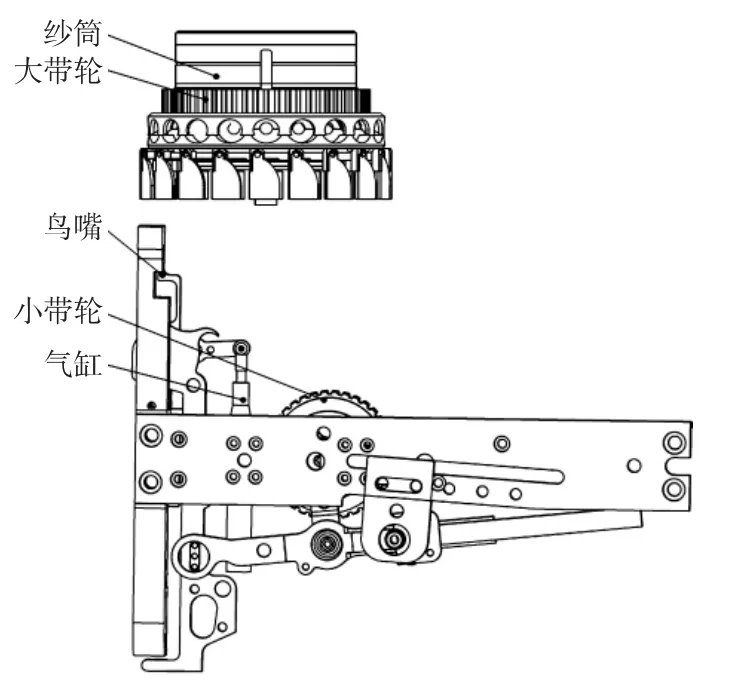
图1 系统机械结构
2 选纱系统软件设计
2.1 软件设计流程
Visual Basic(VB)是一种由微软公司开发的包含协助开发环境的事件驱动编程语言,她源自于BASIC编程语言。VB的易用性就是它的最大优势,可以让经验丰富的VB程序员或是刚刚懂得程序设计的人都能以自己的方式快速开发程序[8]。本系统在Windows环境中采用Visual Basic 6.0进行软件系统开发。经研究分析,选纱系统软件功能应包括地毯图像的载入、尺寸修改、RGB值读取和花型数据转化等,因此软件设计流程如图2所示。
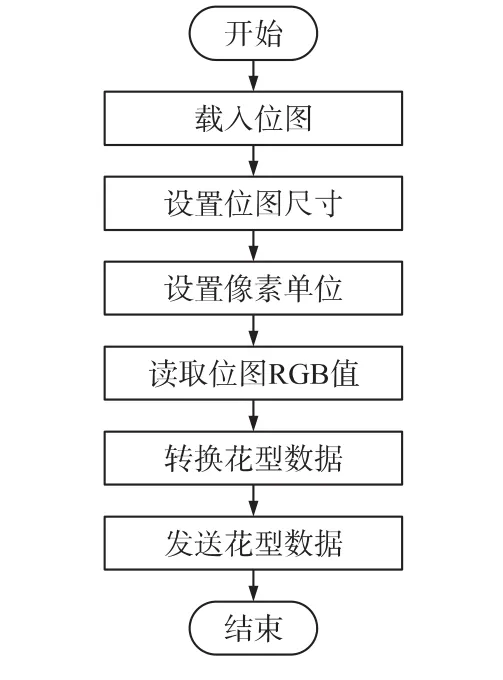
图2 软件设计流程图
2.2 花型数据转换
为自动获取花型数据,系统软件采用 Visual Basic中图片框Point方法[9]读取地毯图像各像素点的RGB值,并记:

(i,j)代表像素点在图像中的位置,但该值不能作为控制下位机运动数据。在读取图像每个像素点RGB值后,将RGB值存入ppoint数组中进行数据转换处理。将颜色进行分类编号并将图像中每个位置像素点颜色对应的编号标定出来。具体花型数据转换算法如图3所示。
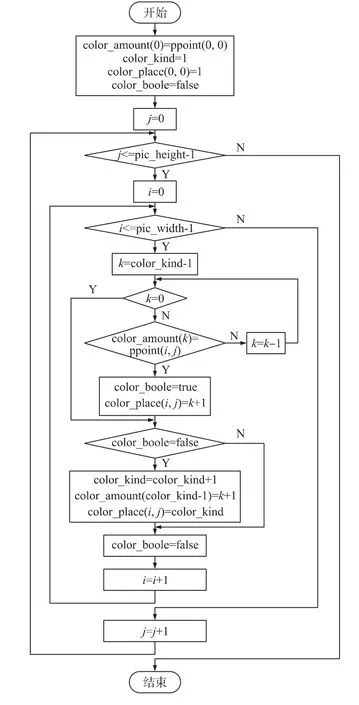
图3 花型数据转换算法
算法中color_amount(k)记录颜色编号;color_kind记录颜色种类;color_place(i,j)记录图像(i,j)位置像素点颜色编号。花型数据转换运行实例如图4所示。
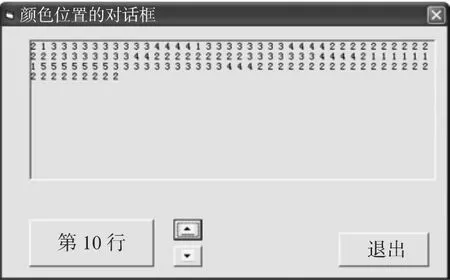
图4 花型数据转换运行实例
图4中显示了地毯图像第10号颜色编号信息,颜色编号即代表该种颜色纱线在纱筒中的位置。为方便工作人员穿引纱线,还需显示出各编号颜色具体信息,运行实例结果如图5所示。
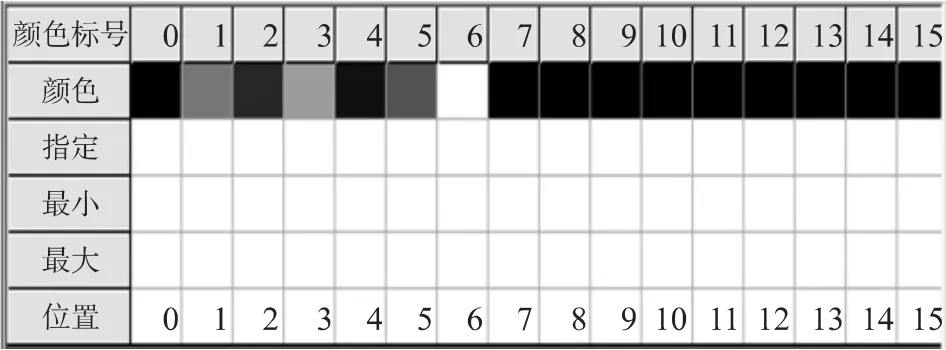
图5 图像颜色信息运行实例
工作人员可按照图5在纱筒1号~20号纱孔中穿入相应颜色纱线。例如可在1号孔穿入浅棕色纱线,在2号孔中穿入深褐色纱线等,没有对应颜色的显示黑色。
3 硬件控制系统设计及功能实现原理
3.1 控制系统及功能
本文设计的选纱系统控制系统及功能图如图6所示。
图6中运动控制卡选用DMC-21X3系列galil运动控制卡,该卡具有运动控制—反馈接口和I/O信号接口等,并通过工业以太网与PC机实现通讯。纱筒接近开关、鸟嘴磁性开关、中间继电器、漏纱检测端口与24VDC电流串联接入运动控制卡I/O端口,步进电机驱动器、伺服电机驱动器接入运动控制—反馈接口。纱筒接近开关选用圆形电容式接近开关,气缸选用磁性气缸,并选用相应的鸟嘴磁性开关,其他控制部件选型不做赘述。
3.2 系统功能实现原理
3.2.1 纱筒原点检测原理
为确保选纱系统能够正常工作,正确选取纱线,因此在系统运行之前,必须准定位纱筒转动原点位置,系统将1号纱线孔位置作为纱筒转动原点位置。系统纱筒原点检测原理如图7所示。
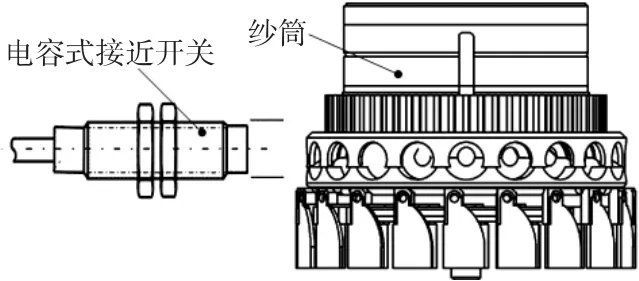
图7 纱筒原点检测原理
系统检测原点位置时,纱筒在步进电机驱动下开始转动。当纱筒1号纱孔中心位置旋转至接近开关(常开型)前方,由于1号纱孔中心位置相对其他纱筒位置相对高出,触发接近开关电路转换为低电平。galil运动控制卡检测到接近开关输入口为低电平,随即触发步进电机停止转动指令,从而检测出纱筒原点位置。
3.2.2 纱筒旋转原理
纱线在纱筒的位置相对固定不变,在选纱过程中,步进电机旋转将指定纱线转动到鸟嘴夹纱位置。为提高选纱工作效率,系统采用增量方式控制电机转动并规定顺时针方向为正。为避免纱线塑料管缠绕在一起,规定纱筒旋转不超过180°。求算步进电机旋转增量算法如图8所示。
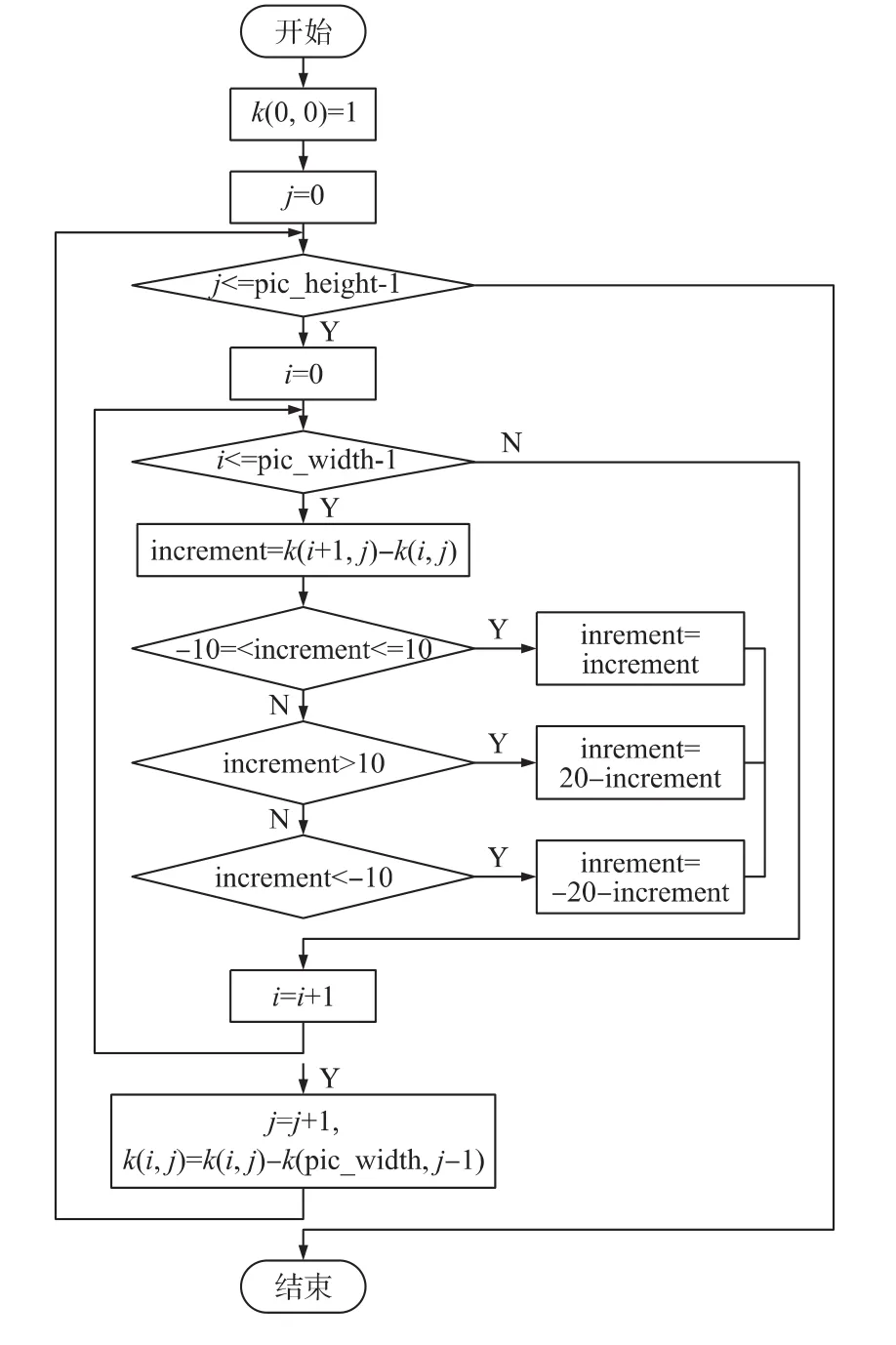
图8 电机旋转增量算法
算法中k(i,j)表示地毯图像(i,j)位置像素点颜色编号,pic_height表示图像高度即行数,pic_ width表示图像宽度即列数,increment表示图片中每个位置后一个像素点颜色编号相对前者的增量。
具体的旋转方法如图9所示。
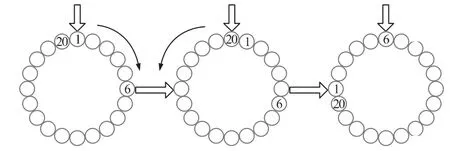
图9 纱筒旋转方法
假设连续3种纱线分别是1号-20号-6号,按照上述增量算法得其增量分别为1,-6,因此从一号纱孔到20号纱孔顺时针旋转1格,从20号纱孔到6号纱孔逆时针旋转6格即可将相应纱线转送至鸟嘴夹持位置。
3.2.3 鸟嘴开闭原理
鸟嘴开闭原理示意图如图10所示。
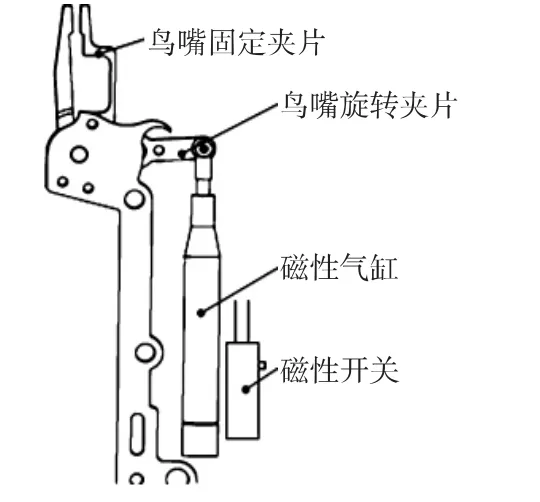
图10 鸟嘴开闭原理
在系统正常运行之前,需要调整磁性开关在气缸上的安装位置,应保证鸟嘴夹片运动至最高点时,气缸内磁环接近磁性开关感应区,磁性开关导通。具体工作原理为:鸟嘴与气缸共同做上升运动,此时气缸下方气口进气,上方气口排气,活塞杆伸长,鸟嘴处于张开状态。当鸟嘴夹片运动至最高点时,磁性开关导通,galil运动控制卡检测到磁性开关输入口为高电平,随即触发打开中间继电器指令,电磁阀得电。电磁阀得电后,气缸上方气口进气,下方气口排气,活塞杆收缩,鸟嘴闭合,闭合一定时间后,鸟嘴再次打开,循环运动实现鸟嘴开闭功能。鸟嘴的闭合时间需根据系统的实际工作情况调试设定。
3.2.4 漏纱检测原理
为避免地毯样品由于漏纱问题产生瑕疵,本选纱系统设计了漏纱检测机构,其检测原理如图11所示。
鸟嘴旋转夹片与鸟嘴固定夹片通过塑料套筒、橡胶垫片实现两者绝缘,galil运动控制卡输出端口串联24V直流电源,并连接固定在鸟嘴两夹片上。当鸟嘴闭合时,若鸟嘴夹住纱线则鸟嘴两夹片之间不导通,输出端口为低电平;若鸟嘴间没有夹住纱线,此时鸟嘴两夹片之间导通,输出端口为高电平,随即触发停机检查指令。
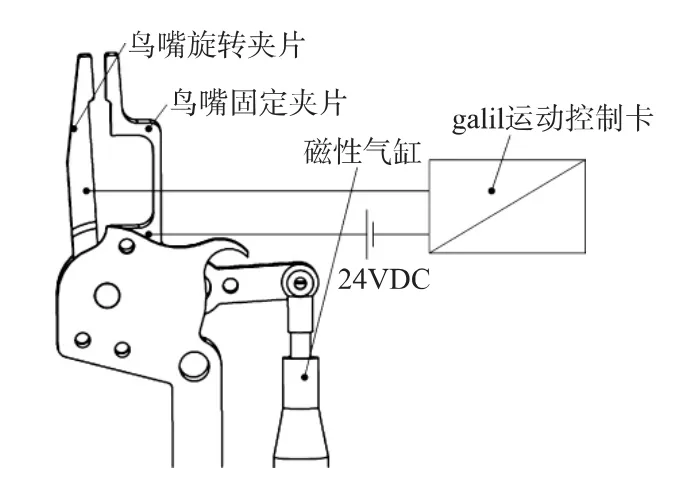
图11 漏纱检测原理
4 结语
本文设计的数控地毯样机选纱系统针对阿克明斯特地毯生产工艺,结合数控机床技术、传感技术等技术,在机械结构、花型数据转换和系统控制方面进行了创新性设计和研究。事实证明,本选纱系统准确高效,故障率低,满足了数控化设备的性能要求及生产需求。
[1] 李琳.浅谈现代地毯的应用于发展[J].轻纺工业与技术,2011,40(2):57-59.
[2] 刘剑,石广成,李康.降低阿克明斯特地毯纱线损耗的探讨[J].轻纺工业与技术,2010,39(5):31-32.
[3] 李刚.Modra技术公司新型簇绒地毯小样机[J].国际纺织导报,2007,20(4):35-36.
[4] 雷良玉,周晓军.基于虚拟样机技术的汽车平顺性仿真分析[J].传感技术学报,2006,19(6):2646-2649.
[5] 孟晶,戴惠良,潘慧.地毯打样机的夹绒与割绒机构设计[J].机床与液压,2012,40(18):29-30.
[6] 贺斌,李文斌,冯行磊.基于PC的小型簇绒机数控系统研究与开发[J].机械工程与自动化,2009,6(3):126-128.
[7] 程杭杭.地毯簇绒机簇绒针传动机构动力学分析[J].制造业自动化,2012,34(6):117-119.
[8] 隋丽娜,迟剑,郭立峰.Visual Basic范例开发大全[M].北京:清华大学出版社,2010:6-8.
[9] 明日科技.Visual Basic从入门到精通[M].北京:清华大学出版社,2012:1-10.

于启保(1986- ),男,汉族,江苏宿迁人,东华大学硕士研究生,主要研究方向为数控机床技术、数字图像处理与识别,yqb_email@126.com;
戴惠良(1963- ),男,汉族,东华大学机械学院副教授,硕士生导师,主要研究方向为计算机集成制造技术(CIMS),CAD/CAM、现代纺织数字化制造装备,daihl@dhu.edu.cn。
Research on Yarn Selection System of NC Carpet Sampling Machine
YU Qibao,DAI Huiliang*,YANG Yanzhu,XU Xinjun
(College of Mechanical Engineering,Donghua University,Shanghai 201620,China)
In order to adapt to the quick,intelligent production demand,this paper presents a new kind of yarn selection system for NC(Numerical Control)carpet sampling machine based on traditional structure.PC system software is developed based on Visual Basic 6.0 to read and convert carpet pattern data.The lower-computer control yarn selection system motion by using GALIL motion control card,proximity switches,solenoid valve and other components.The results prove that this system can automatically select the yarn and check those missing yarn.This system works accurately and efficiently to meet production requirements,improving the sample quality and production rate.
NC carpet sampling machine;yarn selection system;Visual Basic 6.0;GALIL motion control card; proximity switches
10.3969/j.issn.1005-9490.2014.02.034
TP271.4
A
1005-9490(2014)02-0328-04
2013-06-12修改日期:2013-07-13
EEACC:7200;1265F
