定形机排气湿度监控系统设计
2014-09-26李鹏飞苏泽斌景军锋赵永涛
李鹏飞 , 苏泽斌 , 景军锋 , 赵永涛
(1.西安工程大学 电子信息学院,陕西 西安 710048;
2.陕西省纺织印染自动化工程技术研究中心 陕西 西安 710048)
纺织印染行业中,织物的后整理对产品质量的提高有着重要的影响,定形过程中合适的内部湿度能使织物达到最佳的品质,一般根据不同布料大约控制在50%~70%之间[1],如果湿度控制不好,会导致生产布料出现严重的质量问题,同时过烘会造成大量能源浪费[2]。为了更好地实现工艺要求,通过监测排气湿度来控制定形机内部的水蒸气含量。目前,不少企业仍然在采用较为简单的手动调节方式,通过调节排气管上阀门的开度来控制内部的湿度。对此我们设计了一套排气湿度监控系统,能够实时、在线地检测排气湿度,并加以控制,既能保证定形机的正常运行,又能最大地节省能源。本文通过采用参数自整定模糊PID控制的嵌入式系统对拉幅定形机的排气湿度进行实时检测与控制,利用专家的经验知识,模拟人的控制行为,实现一种专家式的非线性控制。
1 检测方法
织物在定形过程中会产生大量的水蒸气,同时也要带走大量热能,造成能源浪费。为了测量排气中水分含量,在定形机排气口安装了二氧化锆(ZrO2)测湿传感器,通过检测气体中氧的比例进而得到水蒸气的含量[3],之后将采集到的湿度信号送入到处理器中计算出排气风扇的最佳转速,达到废气最佳排湿量,以获得更好的节能效果。
排气湿度的预设值通过U盘读到嵌入式系统的数据库,根据不同织物对于定形机的工艺要求以及节能的指数,利用模糊PID算法求出排气风机的相应转速,系统的触摸屏能够显示出当前的排气湿度信息,同时对运行数据进行记录,以便后期对数据的进行分析和应用。根据资料可知,在一定的排气湿度范围内,所消耗的成本指数与织物的蒸发能力存在某种特定的关系,排气湿度值为20%左右时,是成本指数和蒸发能力的平衡点。高于这个参数值时,对织物的蒸发效率影响很小,但是所需成本呈指数倍增长;虽然低于20%时,成本能有效减少,但同时也影响了蒸发效率,达不到所要求的织物所需品质。
2 嵌入式ARM硬件系统的设计及实现
定形机排气湿度监控系统,主要由测湿传感器、现场控制设备、执行电机3个部分组成。在系统中,以ARM芯片作为嵌入式微处理器,利用二氧化锆传感器采集湿度信息、触摸屏设置参数和显示定形机的排气湿度和现场时间。设计采用三星公司的S3C2440作为主控芯片,该处理器采用ARM920T内核,自带8路10位的ADC和触摸屏接口,同时集成了USB、UART、JTAG等接口,符合设计要求,完全能够实现监控系统的功能。控制系统结构框图如图1所示。
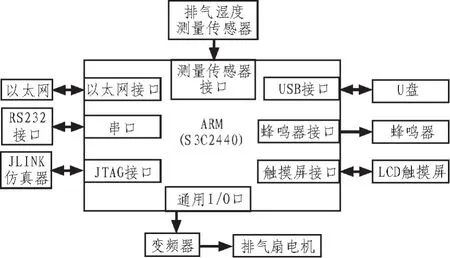
图1 控制系统结构框图Fig.1 Structure diagram of the control unit system
控制系统对采集回来的数据进行实时存储和计算,可以控制排气扇的转速,以达到预期的控制效果。同时输出的排气湿度信息可以实时显示在触摸屏上,结合图形应用软件,可以绘成相关曲线。系统的数据存储部分采用U盘作为整个系统的存储媒介,存储的数据可以为以后研究提供最佳的控制曲线。
3 控制方式选择
对于排气湿度这样具有滞后性、非线性、时变性的控制对象,理论研究和工程实践都充分证明了单纯采用PID控制和模糊控制都很难取得较好的控制效果。而采用Fuzzy_PID复合控制方式是一种最佳的解决方案。
常规离散PID控制算法为

其中,k为采样序号,T为采样时间。
在监控系统的设计中,采用了模糊自适应PID控制,实现了PID参数的在线自适应功能,进一步完善了PID控制的最佳性能,在实际应用中取得了较好地效果。模糊自适应PID控制器以排气湿度偏差e和偏差变化率ec为输入,通过模糊控制规律对常规PID调节器的P、I、D参数进行自整定[5],其控制结构框图如图2所示。

图2 模糊自适应PID控制器结构图Fig.2 Structure diagram of the Fuzzy PID controller
模糊PID控制器建立主要是根据专家经验进行模糊规则的建立,模糊PID控制子程序流程图如图3所示。利用Matlab的Simulink模块对常规PID算法和模糊PID算法进行比较分析,初始湿度值设置为0%,目标湿度值设置为20%,最后得到的系统响应曲线如图4所示。
通过MATLAB仿真实验分析两种控制方法的效果对比来看,模糊自适应PID控制器具有超调量小、响应时间短,但是调节时间改善不明显。模糊自适应PID控制器不仅保持了常规PID控制系统原理简单、使用方便、鲁棒性较强、控制精度高等优点,而且具有模糊控制的灵活性、适应性强等优点。

图3 模糊PID子程序流程图Fig.3 Flow chart of the fuzzy PID
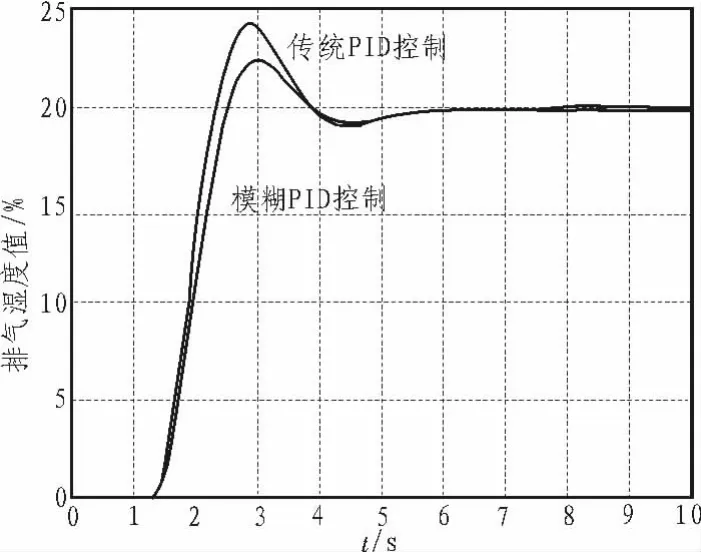
图4 仿真结果图Fig.4 Graph of the simulation result
4 软件系统设计及实现
软件系统设计主要包括Linux操作系统的配置、移植,ARM控制程序的设计,基于QT的人机交互界面设计,以及硬件驱动的设计和加载,由于最后要在ARM中实现,需要构建交叉编译环境。我们采取的方案是在Windows平台下对QT应用程序进行开发,之后将程序源代码复制到Linux操作系统中,利用QT的跨平台特性,对程序进行重新构建。QT应用程序利用多种进程间通信的方法,实现调用控制程序的功能。软件系统总体设计框图如图5。
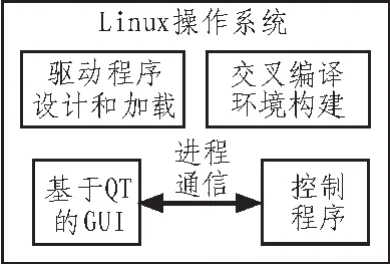
图5 软件系统总体设计结构图Fig.5 Schematic diagram of the software system
4.1 操作系统和驱动的移植
嵌入式Linux操作系统可移植、实时性强、同时适用于不同的硬件平台,能够实现设计要求[7]。系统需要多个设备驱动程序,包括ADC数据采集驱动、触摸屏驱动以及PWM驱动。操作系统内核移植的主要过程就是对于内核代码的正确修改,然后对内核进行配置以设置目标平台和指定交叉编译器路径[8],最后进行编译,以生成内核映像文件。其中主要是对Linux的内核的配置,包括对支持驱动的模块加载[9],支持的S3C2440硬件平台、网口、触摸屏、U盘等,以上Linux内核配置已经能基本满足本控制系统的要求,然后运行make dep,make clean,make zImage编译指令则可生成新的内核映像文件,拷贝到目标板上即可运行。
4.2 控制程序设计
定形机控制程序主要实现初始化和读取系统内预存储值,即给排气扇电机一个初始转速,然后启动排气湿度采集,传感器将检测到信号送入到A/D采集电路中,经放大变换后,将信号送入S3C2440微处理器进行处理,S3C2440微处理器根据设定值和检测值做比较运算后,将采集到的工艺参数显示在人机界面上,同时调用模糊PID控制算法,输出控制信号给执行装置。主程序流程图如图6。

图6 控制程序流程图Fig.6 Flow chart of the controller
5 系统实际运行效果
系统采用QT进行实时人机界面开发,它是挪威Trolltech公司针对不同平台开发的GUI的一款设计软件,只需在一种平台上进行开发,然后在其他平台直接构建就可以直接运行,开发的应用程序清晰美观,易于移植,非常适用于嵌入式开发。在界面中实现对底层传感器的操作,需要使用C++和C的混合编程。在设计的主程序中,C程序主要出现在某些功能函数段中,使用主函数调用初始化函数,进行硬件初始化,并打开A/D设备,调用读取函数,实现数据显示。在ARM上的实际运行效果如图7。

图7 人机界面效果图Fig.7 Interface chart of the test system
6 结 论
本课题将模糊控制和PID控制结合起来,充分利用模糊控制和PID控制的优势,满足不同时刻e和ec对参数自适应的要求,对定形机各项工艺参数具有良好的控制效果。
嵌入式Linux系统能很好地支持数据采集的多样性和实时性,各功能模块的并行使用和友好的人机界面又代表了产品的智能化。利用QT设计的人机界面友好,能够清晰方便地显示定形机运行的参数,方便了设备的监控和管理。
[1]李桂翔,陈庆.染整烘房内湿度检测的研究[J].纺织科技进展,2007(3):33-34.
LI Gui-xiong,CHEN Qing.Research of humidity examination in drying chamber of the dyeing and finishing[J].Progress in Textile Science&Technology,2007(3):33-34.
[2]朱吉良,柴淑清,段新顺.拉幅定形机排气湿度控制节能价值分析[J].染整技术,2010,32(11):39-43.
ZHU Ji-liang,CHAI Shu-qing,DUAN Xin-shun.Analyzing energy saving value obtained by controlling the humidity of exhaust air from stenter heat[J].Textile Dyeing and Finishing Journal,2010,32(11):39-43.
[3]刘江坚.拉幅定形机在线检测系统[J].印染,2011(1):33-36.LIU Jing-jian.On-line detecting system of stenter[J].Dyeing&Finishing,2011(1):33-36.
[4]陈立秋.拉幅定形机的自动测控[J].染整技术,2007,29(6):43-47.
CHEN Li-qiu.Stenters automatic monitoring and control[J].Textile Dyeing and Finishing Journal,2007,29(6):43-47.
[5]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011.
[6]杨益兴,崔大连,周爱军.模糊自适应PID控制器及Simulink仿真实现[J].舰船电子工程,2010,30(4):127-130.
YANG Yi-xing,CUI Da-lian,ZHOU Ai-jun.Self-adaptive fuzzy PID controller and realizing the control system in simulink environment[J].Ship Electronic Engineering,2010,30(4):127-130.
[7]贺丹丹,张帆,刘峰.嵌入式Linux系统开发教程[M].北京:清华大学出版社,2010.
[8]李文,张建泽.基于S3C2440的嵌入式Linux系统移植[J].化工自动化及仪表,2010,37(9):88-92.
LIWen,ZHANGJian-ze.Embeddedlinuxsystemtransplantation based on S3C2440[J].Control and Instruments in Chemical Industry,2010,37(9):88-92.
[9]范玉璋,李文蒙.基于S3C44B0X的热定型机嵌入式温度监控系统[J].微电子与计算机,2007,24(6):77-79.
FANYu-zhang,LIWen-meng.Embeddedtemperaturemonitoring and control system of thermo-fixing machine based on S3C44B0X[J].Microelectronics&Computer,2007,24(6):77-79.
